
基于车载激光扫描技术的行道树提取方法研究
2022-05-11 00:32张凯义
测绘技术装备 2022年1期
张凯义,张 莹
(1.浙江省测绘科学技术研究院,浙江杭州 310030;2.浙江省国土勘测规划有限公司,浙江杭州 310030)
1 引 言
近年来,以移动车辆为搭载平台,综合POS系统、CCD像机、激光扫描头、IMU惯性导航系统的移动车载激光扫描技术发展迅速,已经成为一种新型的空间三维数据采集手段。车载激光扫描系统的优势在于可以短时间内采集海量的点云数据,并且数据具有三维属性信息。随着车载激光扫描技术的不断发展,已广泛应用于城市三维建模、高精地图、市政道路修建等领域[1]。作为城市的重要部件之一,行道树在减小噪音、大气污染治理、城市水循环等方面发挥着重要作用[2]。利用车载激光扫描技术采集行道树信息,可以为城市市政管理带来可靠的数据支撑。
从点云数据中有效提取行道树信息主要有两种方法,一是通过点云的空间分布,提取密度、拟合残差、扫描线信息等特征,依照此类特征实现点云的分类,完成目标提取。如李海亭等[3]根据点云的基本特征构建点云特征向量,然后采用支持向量机模型进行行道树点云识别。但是点云之间的拓扑关系与形态信息没有体现出来,通过上述方法提取地物会有大量的数据运算,并且很难识别与区分出混合点云。另一种方法是对点云数据进行映射,生成二维特征图像,如依据格网内的高程分布的图像,依据点云密度生成的密度图像等。如杨莎莎等[4]利用投影面积和投影点密度识别出行道树,然后通过提取树高检验行道树识别的精度。
作为一种较为完善且相对成熟的图像处理方法,区域增长法已经广泛应用于场景中的地物分类与提取。目前将区域增长法应用到点云数据处理中没有考虑到地物的空间形态信息,对于规则的地物如杆状物,使用此种方法进行提取会得到良好的效果。但是对于场景中复杂地物的提取,如行道树提取,使用此种方法得到的效果并不理想[5]。为了提高对复杂地物提取的准确性,本文将空间分层投影方法引入区域增长方法中。首先,将点云数据分层,对每层点云数据进行投影,计算投影至格网内的点云的密度及高程信息;其次,使用一种从树干底部到树冠顶端的搜索方式完成行道树的提取。
2 行道树提取
行道树在车载点云数据中的上下点云特征差异明显。树冠点云的空间分布范围较大且不均匀,密度较低。树干点云的密度较高,并且在垂直地面方向分布均匀,但平行地面方向分布范围小[6]。实际行道树生长高大,树冠茂密,相邻行道树之间的树冠点云数据可能出现交叉的情况,如图1所示。
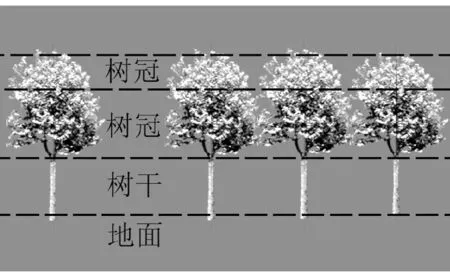
图1 单棵行道树与多棵行道树示意图Fig.1 Schematic diagram of single street tree versus multiple street trees
为了提高行道树的识别度,表现行道树在不同高度层的特征,可对行道树点云的不同高度段进行投影,获取分层投影格网。
2.1 分层投影
根据行道树在实际场景中的形态与车载点云数据中行道树点云的分布范围,点云数据在分层投影时,可对生成特征图像的格网尺度与分层高度进行确定。
2.1.1 格网尺度确定
图2所示为树干点云的投影方式,格网尺度过小或过大得到的投影结果都会很差。设置格网尺度过小,就会大大提高运算量,降低运算效率;设置格网尺度过大,生成的特征图像的分辨率就会降低,丢失较多信息。为了最大限度地将树干的特征体现出来,计算测区内所有行道树树干的平均直径,将格网尺度设置为树干平均直径。
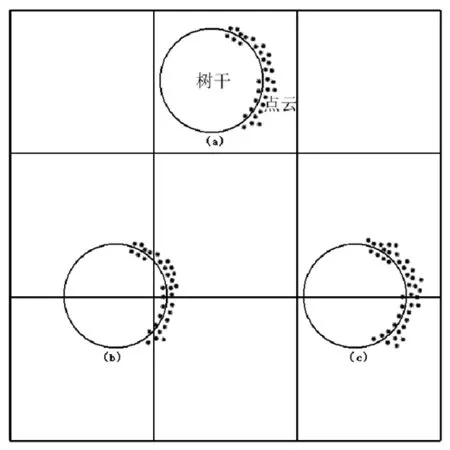
图2 树干格网投影方式Fig.2 Tree trunk grid projection mode
2.1.2 分层高度确定
投影时分层高度决定着地面与树冠投影至同一图像时是否将地面与树冠之间的树干信息遮盖。同时投影前也要考虑到分层后数据量大小、地面起伏状态与部分树干的分枝点不明显等影响投影质量的问题。对测区内的所有树干平均长度进行估算,假设估算结果为AH,通过不断实验,分层高度在AH/3至AH/2之间时,分层投影的效果最好。分层数可表示为[7]:
(1)
式中:Lnum表示分层数,CEIL表示向上取整运算,Zmin表示最小高程,Zmax表示最大高程,dz表示分层高度。
2.1.3 格网特征值确定
筛选得到格网内的点云最小高程值Zmin和最大高程值Zmax,对格网高程值进行赋值;通过对每个格网内落入点云的数量进行统计,获取格网点云密度。
2.2 格网内地物形态分析
分层格网中,地面格网的特点是仅在单层分布,密度较低但分布均匀。树干格网底端连接地面,顶端与树冠相连,水平面上分布范围较小。树冠格网的特点是在水平面上分布范围大但不均匀。建筑物点云投影往往会贯穿多层格网,投影特征图一般呈条带状。杆类物如探头杆、红绿灯杆等在格网内的分布形态与树干在格网内的分布形态较为接近,差异在于探头杆、红绿灯杆这种半径上下一致的杆会贯穿更多的格网层数。由于这类杆没有行道树数顶端树冠的这种结构,因此它们在格网中的范围不大[8]。
2.3 改进区域增长
根据格网的点云密度以及行道树在分层特征图像中的形态特征及其他特征,采用区域增长法识别得到杆状物底层起点,并一直搜索到顶端位置,最后根据事先设置好的特征条件对增长结果进行判断。图3为树木搜索流程图。
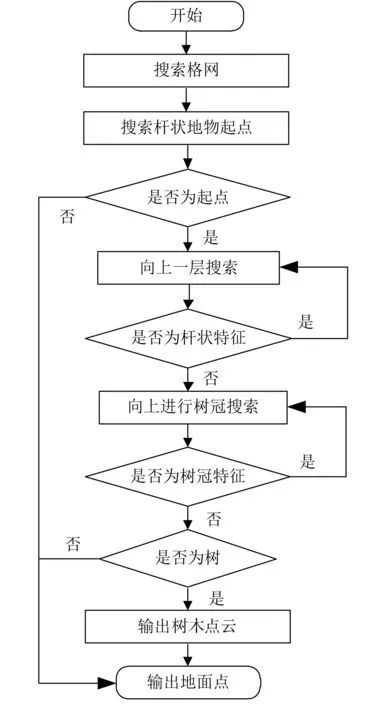
图3 树木搜索流程Fig.3 Tree search process
2.3.1 树干搜索与判断
利用区域增长,参照树干在分层图像中的形态、格网内高程范围及点云密度特征对树干进行识别与判断。判断条件主要包括:
1)起始形态条件。通常情况下,树干从地面依次向上延伸,其下层格网不存在或为空,上层格网不为空。通过将树干起点确定为起始条件,依次向上层进行区域增长。
2)树干形状条件。树木点云中上层格网能够表现出树冠的特征,格网的面积较大且格网内点云密度高。树干从最底层向上增长到顶端时,若搜索条件满足树冠特征,则进行树冠的识别与判断,如果不满足,则停止增长。
3)面积条件。相对于树冠,树干的投影面积更低,可以将判断条件设置为面积阈值,当增长面积大于设置的面积阈值时,树干的识别与判断就可以停止。由于测区内行道树直径不尽相同,树干的理论投影面积要小于实际投影面积,因此,在判断条件的设置时应充分考虑测区实际投影数据。
4)点云密度条件。地面点的分布范围更大,大部分点集中在一个平面内。树干点云相对地面点云,单位体积内的个数更多,所以格网内树干的点云密度更高。区域增长条件可以设置为格网内最小点密度阈值。
2.3.2 树冠搜索与判断
完成树干的识别与判断后,从树干的顶部向上进行树冠的搜索。由于树冠点云投影后,在格网内的规律性不强,所以只能将树冠半径与形状作为搜索的条件。
1)半径约束。从图1可以看到,如果相邻行道树距离太近,或者树冠范围过大,就会造成相邻行道树树冠点云交叉的情况。在区域增长时需加入半径约束防止过度增长,半径大小设置为垂直于行道树排列方向的树冠点云半径大小;圆心设置为树干中心格网。搜索停止的条件之一就是搜索半径大于约束的半径。
2)形状条件。某些地物,如广告牌点云在格网中的表现特征可能与行道树类似,但是这些地物上部不能像树冠一样被激光穿透,故这些地物投影表现为条带状。为了更加准确地分辨出树冠与其他地物,在半径约束之外,根据投影形状的不同加入形状约束。统计非空格网在一格网八邻域内的个数,假设为SN,同时设置阈值T。对非孤立格网数Tn进行统计,同时统计非零格网数N,其中判断非孤立格网的依据是非零格网是否满足阈值T条件。式(2)为非孤立点的面积比例计算[9]:
(2)
式中:SHAPE表示非孤立点的面积比例。
通过大量实验得出结论,使用SHAPE值能有效将条带区域与块状区域区分开。在半径约束的前提下,设置合理的阈值T,能将树冠点云与其他地物点云准确地区分开[10-11]。通过半径约束与形状约束,利用区域增长从下到上进行逐层搜索,并且记录树冠投影的形状与面积参数。
2.3.3 树木判断
对行道树自下而上完成树干与树冠的识别与判断后,对树木的整体通过以下条件进行最终的判断:
1)树木整体高度。同一个测区内的行道树的高度大致相同,将树冠顶点的高程值减去树干与地面连接处高程值得到的高差作为数木的高度。根据现场实际情况得到的树木高度估算值结合树木高度的计算值合理设置高度阈值,将与树木高度相差较大的地物排除。
2)树干高度。为了使行道树不遮挡行人,一般行道树的分枝点高度需大于2.5 m。将树干的终点高程值减去起点高程值得到的高程差作为树干的高度,将树干高度阈值作为识别与判断行道树的条件之一。
3)树冠高度与投影面积。树冠的高度可通过树冠顶部高程减去树冠实际高程得到,设置一定的树冠高度阈值。树冠在分层投影时会得到相对较大的投影面积,通过设置面积约束条件,对树冠进行识别与判断。
3 试验与分析
通过车载激光扫描仪采集得到道路点云及道路两侧行道树、道路部件等点云数据,选择其中三组数据作为本文的试验对象。图4(a)所示为试验数据1,共包含692 563个激光点,图4(e)所示为试验数据2,共包含3 856 294个激光点,图4(g)所示为试验数据3,共包含1 198 752个激光点。
试验使用C++编程实现算法,同时使用典型的格网密度方法与高程阈值法提取行道树,与本文方法进行试验对比。
表1所示为算法的参数设置。图4为原始点云数据与算法实现的行道树提取结果。
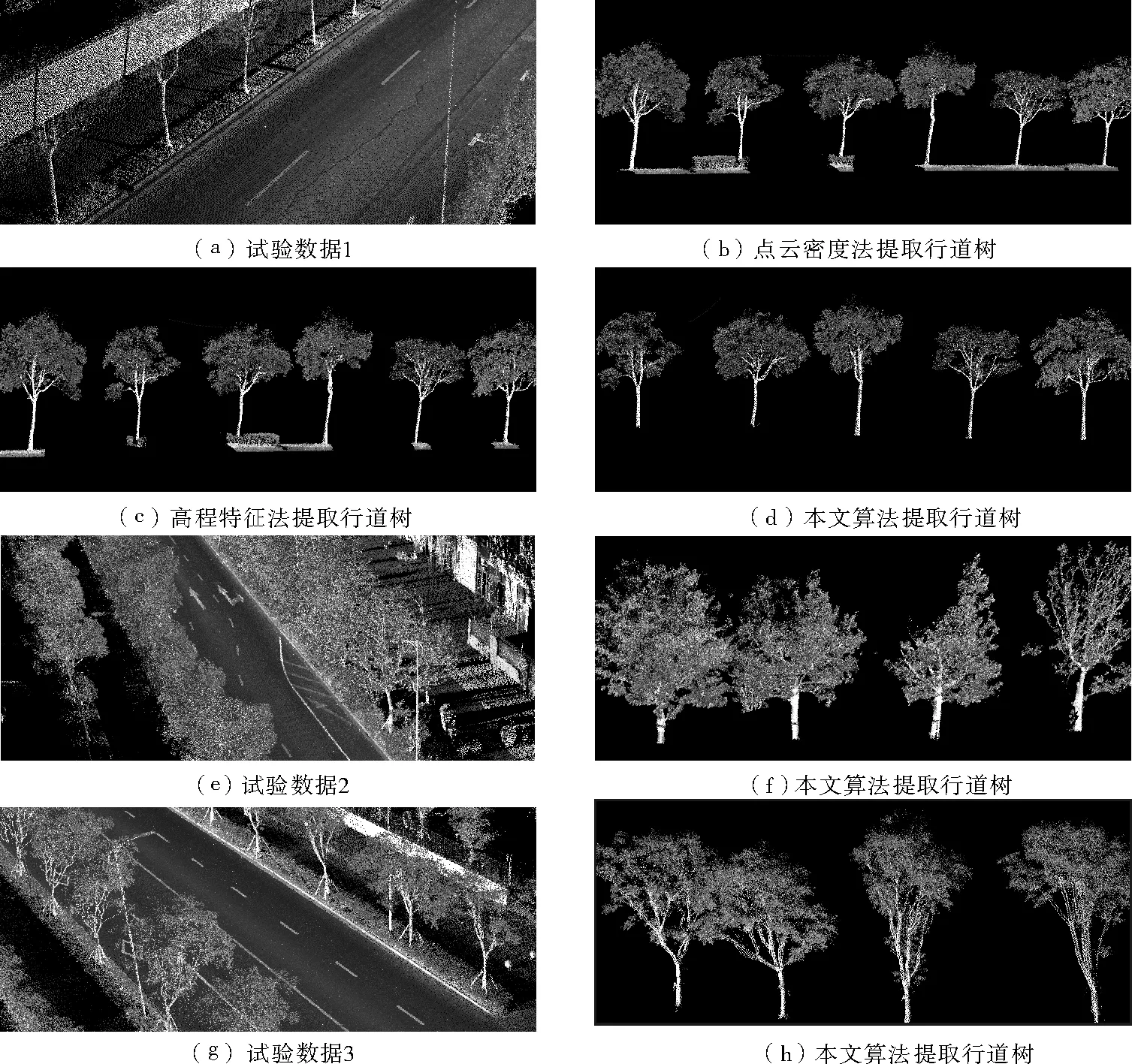
图4 原始点云数据与提取行道树结果Fig.4 Original point cloud data and extracted street tree results

表1 算法参数设置Tab.1 Parametersettingofthealgorithm分组格网尺度/(m×m)分层尺度/m树木高度阈值/m树冠面积阈值/个树冠非孤立点比例树冠半径阈值/m树干面积阈值/m树干高度阈值/m试验结果(图4)10.2×0.212~12>200>0.4<31~60.5~1.5(d)10.2×0.21———<3——(b)10.2×0.212~12—————(c)20.3×0.30.53~10>80>0.4<31~41~2(f)30.5×0.50.52~15>30>0.4<31~40.5~1.5(h)
对比三种行道树提取方法结果,可以看出,使用点云密度法与高程特征法能够将行道树完整地提取出来,但是提取的点云数据中仍然包含树坑内及低矮植被类点云数据,误将此类点云数据识别为行道树点云数据。
将树木的实际形态作为判别行道树条件之一,本文使用的方法能够有效消除其他杆状物、低矮植被类点云数据对行道树提取的影响,而且无论是单棵行道树还是成列行道树,都能实现准确的提取与分类。
4 结束语
利用车载激光扫描技术采集得到包含行道树数据在内的道路点云数据。建立分层格网,对行道树在格网中的表现特征进行分析,结合行道树的其他分布特征,采用一种从行道树树干底部自下而上到树冠顶部的搜索方式提取行道树。相比于以往的行道树提取方法,本文方法可以消除其他地物点云数据对行道树提取的影响,适用于多种复杂场景中行道树的提取。
此外,本研究对于道路两侧其他地物点云数据的提取也有一定的参考价值。但是,该方法的缺陷在于针对行道树点云数据缺失较多的情况,其提取效果不佳,将在后续做进一步研究。
猜你喜欢
绿色科技(2022年16期)2022-09-15
军民两用技术与产品(2022年1期)2022-06-01
家教世界·创新阅读(2021年12期)2021-01-13
当代陕西(2020年23期)2021-01-07
文萃报·周二版(2020年30期)2020-09-02
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
故事家·花开不败(2019年10期)2019-09-10
文学港(2019年5期)2019-05-24
消费导刊(2017年8期)2018-01-18
