
矢量跟踪模型下的北斗复杂信号处理方法
2022-05-13 05:03文援兰
探测与控制学报 2022年2期
陈 婷,文援兰,王 前
(1.扬州市职业大学,江苏 扬州 225002;2.河海大学地球科学与工程学院,江苏 南京 211100)
0 引言
近年来,世界各主要大国都在发展自主可控的卫星导航系统,我国也于2020年7月31日正式开通北斗三号卫星导航系统。随着系统在各行各业的深入运用,特别在人员密集、建筑众多的城市环境中,GNSS (global navigation satellite system)信号在传播过程中会发生较为严重的散射、衰减和反射现象[1],加上人为或者自然的各类有意无意电磁波干扰[2-3],信号变得极其微弱甚至发生畸变,导致接收机无法正确处理信号,影响导航定位功能。
针对上述问题,业界采用两类方法解决:第一类是选取特定区域,对GNSS信号进行长期的统计分析,从而发现其中的规律,利用特定的参数门限评价信号质量,滤除无用的信号[4-5];第二类是提高用户终端的处理性能,用来抵消信号衰落和畸变产生的影响,如多信息源融合[6]、矢量跟踪[7]等,这类方法的特点是适用范围广、无需长时期的观测。
矢量跟踪相对传统用户终端的标量跟踪方式,会有更高的处理增益,是未来现代化终端以及综合PNT(positioning navigation timing)体系[8]的重要实现方式,在深空探测、无人驾驶、系统监测和评估等领域受到关注和应用。文献[9]在设计非相干矢量鉴别器的基础上,提出了最优测量误差的思想,但未对非相干损耗的影响进行深入分析。文献[10]利用幅值/功率信息,通过拟合抛物线的数学方法屏蔽了DLL/FLL结构的差异性,构造出统一模型架构,其本质是通过包络平方处理实现非相干积分操作,从而带来更多的信号增益,但计算复杂度过高,不利于硬件快速实现。
为进一步发挥矢量跟踪在复杂信号处理上的优势,本文从系统总体出发,在矢量模型中采用相干和非相干结合的策略,提高终端弱信号的处理能力;由于VDLL和VFLL在处理结构上的差异性,对VDLL采用基于包络处理的非相干积分方法,对VFLL采用复平方解决非相干问题;与此同时,根据信号的多普勒频移,设计自适应调整的速度谱系数来匹配信号的动态。
1 矢量跟踪模型的基本概念
传统用户终端一般采用标量跟踪方式,即跟踪通道相互独立处理,在观测量层面进行信息融合,实现最终的定位和导航。矢量跟踪充分挖掘信道之间的耦合关系,将信号跟踪和信息解算进行了融合处理,在进行信号持续跟踪的同时完成定位解算。矢量跟踪区别于标量跟踪的显著之处是标量跟踪通过计算单个环路内部的信号残差完成跟踪校正,矢量跟踪则是通过信息融合的位置或速度残差在卫星方向上的几何映射完成环路的跟踪。
从结构对比上看,标量跟踪完成了码相位、载波频率至位置速度的正向变换;矢量跟踪完成了位置速度至视线方向上(line of sight, LOS)码相位、载波频率的反馈映射。矢量跟踪性能优越的本质是多个通道产生的信息冗余减少了伪距和载波频率的观测误差。以矢量跟踪为基础的用户终端在鉴别和滤波环节有许多变化的结构,其中经典的结构如图1所示。
2 动态自适应的高效滤波方法
为了获得更高的信号增益,以增强环境下的终端适应能力,延长积分时间是常规手段,在传统标量终端得到广泛应用。矢量终端与标量终端在性能上的差异,会影响积分的效果,且相干积分和非相干积分被影响的因素不同,因此有必要在系统框架下进行综合分析。主要有以下改进:根据信号功率的物理量特征,采取求包络积分操作;根据时差信号的特征,采用复数平方操作;改变依据传统经验值构造数字滤波器的方法,设计基于spectral parameter参数(即运动加速度噪声功率谱密度,后简称sp参数)的自适应滤波方式,并在此基础上,提出在矢量框架下的一系列应用策略。
2.1 相干积分和非相干积分
在图1所示的接收机跟踪环路中,相关器中的积分清除装置通过积分来消除信号中的高频成分和噪声。通常跟踪环路对信号积分之前会进行正交分解,形成I支路和Q支路信号,因此这种积分取名为相干积分。不同种类的跟踪环路对信号处理的方式有所差异,伪码环在正交之后会通过时序的差异形成超前、即时和滞后支路。以I支路信号iP(t)=aD(t)cos(ωet+θe)为例,式中ωe为本地产生信号与接收星上信号的频率差,经过Tcoh时间积分清零后得到的连续时间结果为:
(1)
相应的离散时间积分结果为:
(2)
相干积分的作用是低通滤波,因此经过积分后的信号有较高的信噪比,积分时间越长,积分增益越高。公式为:Gc=10lgTcoh。
相干积分时间会受到各类因素的制约,其中最重要的因素是电文速率,若数据电平在积分时段由于电文内容的变化发生跳变,就会削弱相干积分的效果。除此之外,相干积分时间还会影响环路的更新周期。为了克服相干积分的缺点,引入了非相干积分的方法,即利用相干积分的输出进行复数运算产生额外的增益。
以VDLL环路即时支路为例,直接进行取包络处理再进行Nnc次累加得到的非相干积分值为:
(3)
与VDLL不同,VFLL环路鉴别器结构中没有超前、滞后等时序分量的操作,只能对正交分量进行处理,因此需要复平方操作以消除电文差异。具体公式为:
(4)
(5)
非相干在产生积分增益的同时,也会产生平方损耗,是信号中的噪声经平方操作引起的。信号越弱,非相干产生的平方损耗越大。平方损耗是与多阶修正贝塞尔函数关联的复杂数学表达式,可通过数学拟合简化为以CNR为变量的线性函数关系。因此,实际应用过程中在非相干操作之前需尽可能提高信号中的有用成分。相干和非相干的使用效果会受到入射信号、计算延迟、应用环境等多种因素的制约,后续试验将重点讨论两者的配对关系。
2.2 基于sp参数的滤波操作

(6)
式(6)中Wk为过程噪声,它由载体的运动加速度噪声功率谱密度(简称sp参数)、钟差、钟漂噪声功率谱密度这三个参数决定。其中sp与载体动态关系密切,是应用中需要重点关注的参数,钟差、钟漂参数的晶振物理特性决定,分别设定为:2×10-19(m/s)2/Hz和2×10-21(m/s2)2/Hz。
测量方程为:
Zk=HkXk+Vk,
(7)
式(7)中,Zk为各通道码相位鉴别器和载波频率鉴别器输出的码相位时延残差估计以及载波多普勒残差估计;Vk为观测噪声,由鉴别器输出结果的方差决定。
图1中的码相位和载波频率鉴别器分别为E-L鉴别和四象限反正切鉴别。这两类鉴别方法与传统标量模型中在应用上没有区别,差异主要体现在鉴别器之前的相关器数据输出。经过通道融合和非相干操作后的数据比标量模型的输出数据有更小的噪声方差。
3 性能验证
3.1 方案设计
导航信号一般是由幅度、频率、扩频码、导航电文等要素构成的,因此不管实际的应用环境如何复杂,最终对导航信号的直接影响会造成幅度减小、时序混乱、多普勒动态。因此,本文为减少传输环境中的不确定性因素,根据场景需要,利用信号模拟源设备产生不同强度、不同动态的中频卫星信号,输入到标量或矢量软件接收机中,得到的处理结果上传到评估中心按照历元发送顺序进行一一比对。
为体现复杂场景的代表性,选取中、弱强度,高中低各类动态的试验场景,分别展开性能验证。同时为更好聚焦复杂信号处理这一主题,合理公平地评价算法性能,作两点假设:1) 电离层、对流层延迟均采用无误差模型;2) 不同算法均采用同样的NCO(numerically controlled oscillator)模型,避免时钟性能因素对处理效果的影响。
3.2 中信号、中动态场景
按照系统的建设指标,北斗信号的落地电平一般在-130 dBm以上,通过载噪比换算可知此时的信号强度在40 dBHz以上,定义为强信号,30~40 dBHz的信号为中信号,30 dB Hz以下的信号为弱信号。本节的中信号设定为35 dBHz,动态加速度为2g。
图2表示不同相干积分时间作用下的三维定位误差,此时sp参数设为2。由图可知,相干积分从2 ms到5 ms和10 ms后,定位误差逐渐减小,延长积分时间有效减少伪距的测量误差。矢量跟踪由于多环路信息融合带来的性能优势,可比同等条件下的标量结构获得更优的测距结果,且这种结果在弱信号环境下更加明显。

图2 不同相干积分时间下的三维定位误差Fig.2 Three-dimensional positioning error of different coherent integration time
图3表示不同sp参数作用下的三维定位误差,此时相干积分时间统一设为2 ms。在相同的滤波带宽情况下,黑色线条比灰色线条更为平滑,即矢量跟踪环路的定位精度仍高于标量跟踪环路,且更为平稳。由图3(a)可知,尽管sp参数设置得很小,不能抵消动态带来的较大频率估计误差fe,标量模式下会造成sinc(feTcoh)的信息损失,但是矢量模型通过通道间的信息融合,减少了频率误差,使得该模型下的2 ms相干积分效果明显优于标量模型。而图3(b)中在中动态条件下,增大sp参数使环路承受了更多的动态应力,明显提升接收机的定位精度。

图3 不同sp参数下的三维定位误差Fig.3 Three-dimensional positioning error of different Sp parameter
3.3 弱信号、中低动态场景
弱信号低动态场景设定信号强度25 dBHz,中低动态加速度分别为2g和0.1g。为支持在中国周边地区快速播发精密定位信息,根据文献[11]对北斗三号B2b信号的描述,B2b信号信息速率为500 bps,即每bit信息持续时间2 ms,为保证相干积分的效果,设定相干积分时间为2 ms,历元间隔为0.1 s,定位效果如图4所示。尽管采用矢量跟踪模式,但定位结果完全发散,无法正确处理微弱信号。
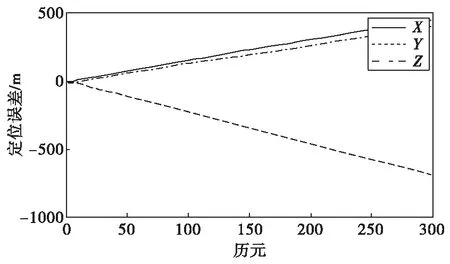
图4 弱信号相干积分时间2 ms下的定位误差Fig.4 Positioning error of 2 ms coherent integration time and weak signal
为突破电文传输速率的限制,在相干积分2 ms的基础上,分别在VDLL和VFLL环路开展非相干操作。非相干积分数目调整为10、20、40。图5反映了VDLL输出的三维定位效果。非相干相比2 ms相干积分,取得额外的增益,因此能正确处理信号。非相干20和40次数的定位误差优于10次的效果。

图5 弱信号在不同非相干积分时间下的三维误差Fig.5 Three-dimensional positioning error of different coherent integration time and weak signal
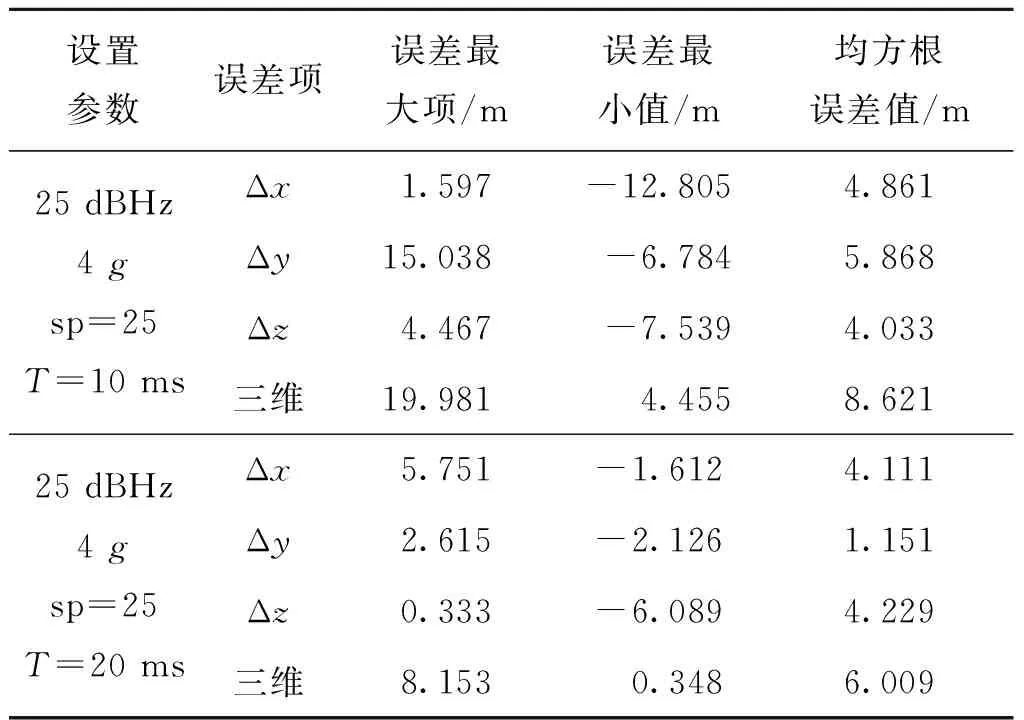
对不同场景不同处理方法下的三维定位误差归纳如表2所示。由表2可知中等强度以上的信号,矢量和标量模式都能处理,但矢量模式获得的定位效果更好;而对于弱信号场景,矢量处理体现出较明显的优势。

表2 不同处理方法的定位精度对比Tab.2 Comparison of positioning accuracy of different processing methods
当非相干次数增长到一定程度时,会受到动态和时钟抖动的影响以及伪码测距性能的限制,定位性能的提升也达到极限。总积分时间相等条件下,相干积分会比非相干积分取得更好的效果,主要原因是非相干通过平方操作提高信号增益的同时,也放大了噪声,一定程度上会抵消部分的信号增益。
图6和7分别反映了总积分时间在80 ms条件下的VFLL测速和VDLL测距误差。由图可知,无论是测距还是测速,10 ms×8模式的性能都明显优于2 ms×40模式,即前者更好地解决了平方损耗问题,因此比后者产生更大的增益。
3.4 弱信号、高动态场景
为了综合比较积分时间和滤波带宽的作用,设置了恶劣的弱信号和高动态场景,信号强度为25 dBHz,动态加速度6g和4g。表3为不同参数设置下的三维定位误差项分布。当sp=60,积分时间T为12 ms,已经取得较好的效果,但随着信号环境的恶劣,再增大也不能带来性能的提升。对比两场景的试验结果,尽管信号强度相同,由于动态应力不同,6g动态下的参数设置较大,但定位效果仍然不如4g动态下的效果,说明动态的频移会影响积分的效果。因此两个参数既相互联系又相互制约,存在一个动态的平衡关系。
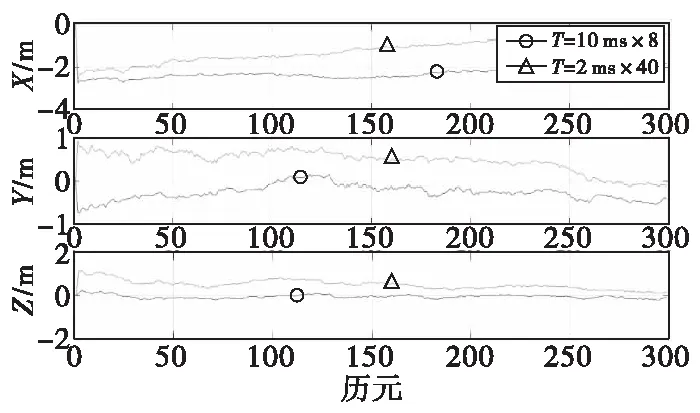
图6 弱信号不同非相干、相干组合下的速度误差Fig.6 Velocity error under combination of different coherent and non-coherent integration

图7 弱信号不同非相干、相干组合下的定位误差Fig.7 Positioning error under combination of different coherent and non-coherent integration

表3 弱信号高动态场景下不同参数设置下的三维误差
续表
4 结论
矢量跟踪模型融合多个通道信息,可提升导航信号的处理增益。为进一步增强该结构的适应能力,屏蔽电文比特跳变对相干操作的限制,本文围绕积分时间和动态噪声功率谱密度这两个重要参数,对VDLL环路取包络操作,对VFLL采用复平方操作,同时设计自适应的动态滤波算法。对于今后的实际应用,提出三点建议:
1) 相干积分的效果会受到频率误差的影响,矢量跟踪方式相对于标量模式,通过信息融合可在一定程度上减轻动态应力引起的频率漂移,因此取得更好的相干积分效果,有利于减缓积分时间短引起的测距性能下降问题。
2) 在未突破电文比特跳变限制的条件下,应优先使用相干积分操作。对于北斗B2b等数传速率超快的信号,推荐积分参数设置在2 ms×20量级,过长的非相干积分次数会引起计算复杂度的增加,且无益于性能的提升。
3) sp参数不仅影响载体的动态适应范围,而且影响积分操作的效果,其设置值不应大于载体的最大动态加速度。
下一步计划引入北斗信号中的导频分量和数据分量进行联合处理,研究不同跟踪结构对联合处理方法的影响效能。
猜你喜欢
心理学报(2022年10期)2022-10-12
导航定位学报(2022年4期)2022-08-15
无线互联科技(2022年4期)2022-05-11
河北工业大学学报(2021年4期)2021-09-23
中学生数理化·高一版(2021年11期)2021-09-05
电子产品世界(2021年8期)2021-01-16
布达拉(2018年5期)2018-05-14
西江文艺(2017年15期)2017-09-10
中国新通信(2016年12期)2016-08-09
新高考·高一物理(2016年1期)2016-03-05
