
山区公路驾驶员视觉行为特性仿真研究
2022-05-27 10:11黄盛杰
福建交通科技 2022年2期
■梁 钰 王 渠* 黄盛杰
(1.福建工程学院交通运输学院, 福州 350116; 2.福州大学土木工程学院, 福州 350108;3.厦门市市政建设开发有限公司, 厦门 361006)
我国山地、丘陵、高原等地形的山区面积大约占全国陆地面积70%,山区公路在我国公路里程中有着相当重要的位置。同时,由于山区公路线型复杂、坡陡弯急、车道数少、视距不足等特点,极易诱发交通事故。 其交通事故数、受伤人数和死亡人数均较高[1-2]。
道路交通系统由人、车、路、环境构成的复杂循环的系统。 驾驶员在整个复杂的系统中处于核心地位,其在道路上行驶首先受到道路条件、交通条件等外界信息影响, 依靠各种感知器官获取信息,并传递至大脑神经中枢进行信息处理,然后大脑将信息判断决策结果传递至驾驶员手脚,从而实现操控车辆行驶,因此驾驶员在道路交通系统中起着信息处理、决策、调节者和控制的作用,其视觉搜索行为对交通安全影响深远[3-4]。 Geoffrey 等[5]、Kristofer等[6]、Ping 等[7]、王雪松等[8]、杨龙海等[9]、朱守林等[10]、房日荣[11]开展市政道路、高速公路等不同道路的自然驾驶试验, 获得车辆在自然驾驶过程中的速度、加速度以及车辆轨迹等大量数据,得到了不同道路条件下不同车辆的驾驶行为特征, 对行驶速度、操控频次、危险识别、参考信息量、驾驶熟练程度等对驾驶员视觉特性的影响规律。 冯忠祥等[12]研究了攻击性驾驶行为, 发现了对攻击性驾驶行为影响最大的两个因素分别是人格和其他车辆违法情况。Merte[13]认为要注重驾驶心理过程,深入探讨人格气质等特质,揭示驾驶行为特性的影响因素对交通事故具有深远的影响。 但是,目前国内外对于驾驶行为研究主要集中在城市道路环境,而对于山区公路环境下的驾驶行为研究仍较少。 因此,本研究利用室内驾驶模拟仿真试验控制车辆和道路环境两个因素,以驾驶员为试验变量,探讨不同熟练程度驾驶员在山区道路环境下的视觉行为特性表征指标规律及差异性。
1 驾驶模拟仿真试验方案设计
1.1 试验对象
本次试验共选取108 名持有有效驾驶证的驾驶员作为试验对象,校正视力正常,且无精神类疾病史。根据驾龄将试验对象分为3 年以下为非熟练驾驶员,3 年以上为熟练驾驶员,共2 类。 最终确定驾驶员试验样本为54 名非熟练驾驶员,54 名熟练驾驶员。
1.2 试验条件
山区二级公路交通事故频繁,存在较大的安全隐患, 因此本次试验选取典型山区二级公路S201(罗源碧里至鉴江段)作为试验道路,根据该段道路的设计文件构建模拟驾驶环境。 试验路段全长14.87 km,采用二级公路建设标准,全线采用双向4车道设计,设计速度为60 km/h。 试验中应用的设备主要有汽车模拟驾驶系统SimLab(图1)和可穿戴眼动追踪系统Tobii Glasses 2(图2)。

图1 汽车驾驶模拟系统

图2 可穿戴眼动追踪系统
1.3 试验过程
驾驶员在驾驶模拟舱中进行仿真试验,试验设计为单盲试验,即不告诉受试驾驶员试验的真实意图。 所有被试驾驶员接受统一的指导语,要求驾驶员按照自己的驾驶习惯自由驾驶, 由起点驶向终点,期间不限制速度,全程采集驾驶员试验数据。 试验流程如图3 所示。

图3 驾驶模拟防真试验流程
2 视觉行为特性表征指标分析
2.1 注视次数
注视次数分布的趋势大体呈先增后减分布(图4),单位时间内注视次数不均匀分布在0~3.6 次间,且每秒注视次数大部分都在1.5 次以内,约占90%,平均值为0.802,标准差为0.508。
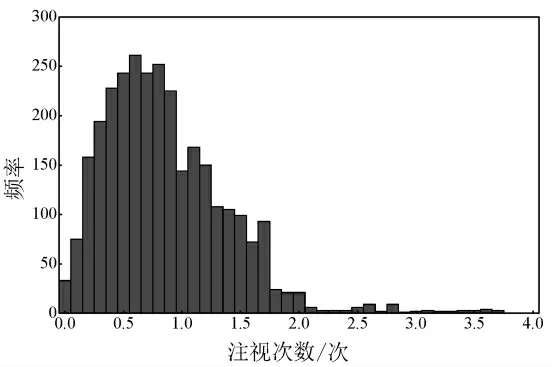
图4 注视次数分段统计
将注视次数按照每0.3 次1 个区间进行分段(图5),与非熟练驾驶员相比,注视点数在0~0.6 次/s时,熟练驾驶员注视次数频率较低;注视次数在0.6~1.5 次/s 时, 熟练驾驶员的注视点频率较高;1.5次/s以上时,两者注视次数基本一致。 非熟练驾驶员在0.3~0.6 次/s 分段比例最高, 而熟练驾驶员在0.6~0.9 次/s 分段达到最高, 说明熟练驾驶员对信息的感知能力强,对目标的注视转换速度快。

图5 熟练与非熟练驾驶员注视次数分段比较
随机抽取熟练与非熟练驾驶员各18 个样本,平均注视次数分别为0.903 次/s 和0.676 次/s。 利用Kolmogorov-Smirnov 检验法, 熟练与非熟练组显著性P 值分别是0.241、0.974,均大于0.05;利用Levene 检验法,检验结果的显著性P 值为0.476,大于0.05, 可以认为这两组数据具有正态性和方差齐次性,由此对两组数据进行方差分析,显著性P 值为0.043,小于显著性水平0.05,说明在山区公路环境下,熟练程度对驾驶员注视次数具有显著影响。 熟练驾驶员平均注视次数高于非熟练驾驶员,相当于熟练驾驶员在一次注视中所耗费的时间比非熟练驾驶员低, 这是因为在山区公路交通环境复杂,处理的信息比较多,非熟练驾驶员注视点转移速度较慢, 而熟练驾驶员能够同样的时间注视更多的目标,确保信息不丢失,从而产生更多的注视次数。
2.2 注视时间
注视时间分布的趋势大体呈递减分布(图6),注视时间分布在0~1 100 ms, 且注视时间在0~200 ms 区段的比例是所有区间段中比例最高的,约占90%, 与城市道路环境注视时间集中在200~250 ms 相比较[14],山区公路驾驶员的注视时间较小,平均值为92.613,标准差为115.872。
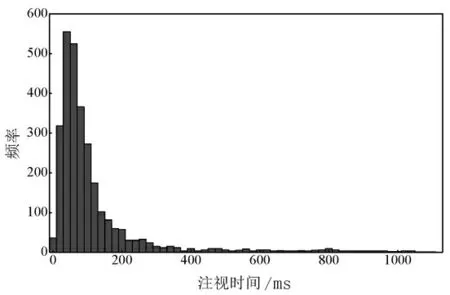
图6 注视时间分段统计
将注视时间按照每50 ms 1 个区间进行分段(图7),与非熟练驾驶员注视时间相比,在0~50 ms区段,熟练驾驶员注视时间频率较低;在50~300 ms区段,熟练驾驶员注视时间频率较高;这说明熟练驾驶员注视时间频率主要分布在注视时间较大的区段,随着驾驶经验的增加,注视时间呈增长的趋势;350 ms 以上区段, 熟练驾驶员与非熟练驾驶员相差不大,这是因为随着目标信息量的增大,此时熟练驾驶员已经无法凭借丰富的驾驶经验优势去迅速理解信息,这时候需要花费与非熟练驾驶员同样的理解时间。
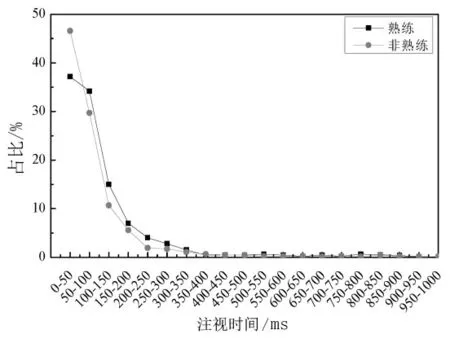
图7 熟练与非熟练驾驶员注视时间分段比较
随机抽取熟练与非熟练驾驶员各18 个样本,平均注视时间分别为102.831 ms 和75.572 ms。 利用Kolmogorov-Smirnov 检验法,熟练与非熟练组显著性P 值分别是0.381、0.527, 均大于0.05; 利用Levene 检验法,检验结果的显著性P 值为0.815,大于0.05,可以认为这两组数据具有正态性和方差齐次性。两组数据进行方差分析,检验结果的显著性P值为0.041,小于显著性水平0.05,说明在山区公路环境下, 熟练程度对驾驶员注视时间具有显著影响。 熟练驾驶员注视时间均值高于非熟练驾驶员,这是由于山区公路的复杂性,熟练驾驶员需要更多的注视时间去理解信息, 而非熟练驾驶员容易慌乱,扫视较多,过长的注视对其行车影响很大,停留在信息上的注视时间较小,易忽略信息。
2.3 扫视幅度
驾驶员的扫视幅度不均匀地分布在0~40°,扫视幅度分段频率变化趋势均呈递减趋势(图8)。

图8 扫视幅度分段统计
将扫视幅度按照每4°1 个区间进行分段(图9),与非熟练驾驶员相比,在0~4°区段,熟练驾驶员扫视幅度频率较低;在4~16°区段,熟练驾驶员相对较高;在16°以上区段,熟练与非熟练驾驶员扫视幅度频率基本一致。 二者扫视幅度频率在0~4°区段最高,且熟练驾驶员低于非熟练驾驶员,这表明非熟练驾驶员在行车过程中,谨慎驾车,以小幅度扫视为主,视觉搜索范围小;而熟练驾驶员更注重大范围的扫视以获取周围更多的信息。

图9 熟练与非熟练驾驶员扫视幅度分段比较
随机抽取熟练与非熟练驾驶员各18 个样本,平均扫视幅度分别为14.539°和10.118°。 利用Kolmogorov-Smirnov 检验法, 熟练与非熟练组显著性P 值分别是0.700、0.153,均大于0.05;利用Levene 检验法,检验结果的显著性P 值为0.004,小于0.05, 可以认为这两组数据具有正态性但不具有方差齐次性。 因此,对两组数据进行Mann-Whitney U非参数检验分析,显著性P 值为0.000,小于0.05,说明在山区公路环境下,熟练程度对驾驶员扫视幅度具有显著影响。 熟练驾驶员扫视幅度均值大于非熟练驾驶员,说明行车过程中,相比于非熟练驾驶员,熟练驾驶员对目标的搜索更为积极,范围更广,因此能够获得更多的信息保障自身的驾驶安全,这对于交通安全起到重要的作用。
2.4 扫视速度
扫视速度分段频率变总体均呈先增后减趋势(图10)。 驾驶员的扫视速度不均匀地分布在0~220°/s,扫视速度分布总体呈递减趋势。 扫视速度在30~40°/s 区段所占比例最大,说明在山区公路环境下行车,驾驶员的扫视速度不宜过快,速度过快容易忽略某些重要信息。 与城市道路的扫视速度集中20~30°/s 相比较[15],山区公路的驾驶员扫视速度更快。
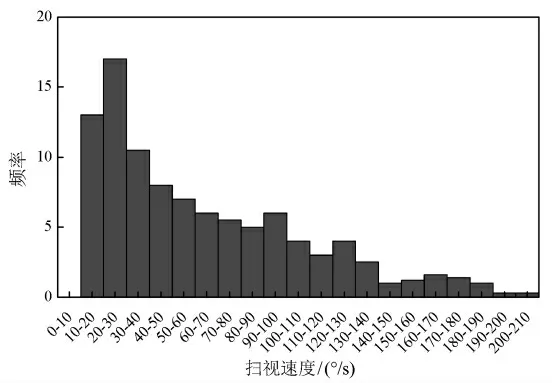
图10 扫视速度分段统计
将扫视速度按照每20°/s 一个区间进行分段(图11)。熟练驾驶员与非熟练驾驶员的扫视速度在30~50°/s 区段内频段均为最高。 扫视速度在70°/s以下, 熟练驾驶员的比例低于非熟练驾驶员;70°/s以上,熟练驾驶员的比例高于非熟练驾驶员。 说明非熟练驾驶员的扫视速度在低值区间内集中,小幅度眼跳次数较多, 每次扫视对信息的采集量偏小;熟练驾驶员的扫视速度主要集中于中高值区间,每次扫视的信息采集量大。
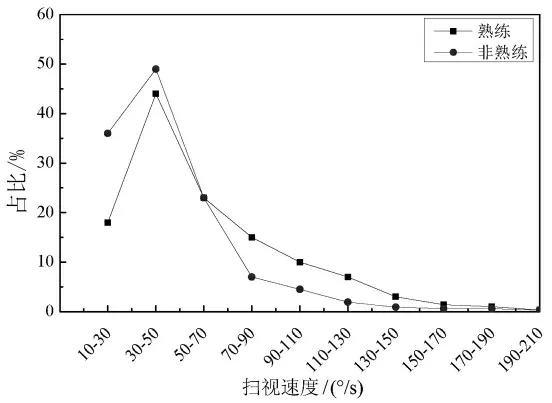
图11 熟练与非熟练驾驶员扫视速度分段比较
随机抽取熟练与非熟练驾驶员各18 个样本,平均扫视速度分别为27.660°/s 和25.001°/s, 利用Kolmogorov-Smirnov 检验法, 熟练与非熟练组显著性P 值分别是0.837、0.795,均大于0.05;利用Levene 检验法,检验结果的显著性P 值为0.962,大于0.05, 可以认为这两组数据具有正态性和方差齐次性。 对两组数据进行方差分析, 显著性P 值为0.053, 属于在显著性水平0.1 条件下,P 值小于0.1区间,说明在山区公路环境下,熟练驾驶员与非熟练驾驶员在扫视速度上具有显著差异。 熟练驾驶员扫视速度均值高于非熟练驾驶员,这表明非熟练驾驶员在驾驶过程中,熟练驾驶员眼球以较快速度寻找目标,能够尽量节省时间获取更多信息;而非熟练驾驶员在目标吸引点的转换上较慢,当周围环境较多且复杂时,会因来不及感知信息而发生信息丢失,由此可能导致交通事故。
3 视觉行为特征评价
非熟练驾驶员注视点转移速度较慢,熟练驾驶员能在相同时间注视更多的目标, 确保信息不丢失,从而产生更多的注视次数;熟练驾驶员需要更多的注视时间去理解信息,而非熟练驾驶员容易慌乱,过长的注视对其行车影响很大,停留在信息上的注视时间较小,易忽略信息;非熟练驾驶员驾车谨慎,视觉搜索范围小,而熟练驾驶员目标的搜索更为积极,更注重大范围的扫视以获取周围更多的信息; 非熟练驾驶员的扫视速度在低值区间内集中,小幅度眼跳次数较多,每次扫视对信息的采集量偏小;熟练驾驶员的扫视速度主要集中于中高值区间,每次扫视的信息采集量大。
4 小结
(1)熟练与非熟练驾驶员在注视次数、注视时间、扫视幅度和扫视速度上具有显著性差异。 (2)具有丰富驾驶经验的驾驶员在视觉搜索方面更有技巧,能够快速准确的捕捉大量信息,但需耗费更长的反应时间,也容易采取较为的冒险动作。 (3)驾驶经验尚浅的驾驶员在视觉搜索方面显得较为拘谨,感知信息速度慢,获取信息量较少使所需反应时间短,受自身驾驶经验和驾驶水平限制,车辆操控较为谨慎。
猜你喜欢
云南画报(2021年11期)2022-01-18
铁道通信信号(2021年6期)2021-07-08
当代陕西(2020年17期)2020-10-28
铁道通信信号(2020年1期)2020-09-21
数学小灵通·3-4年级(2020年4期)2020-06-24
科技视界(2020年8期)2020-05-18
小学生学习指导(低年级)(2018年11期)2018-12-03
小太阳画报(2018年7期)2018-05-14
中学生数理化·高一版(2018年1期)2018-02-10
太空探索(2016年9期)2016-07-12
