
多功能六轴机器人机械手臂控制系统研究
2022-06-26 15:46夏明
科教创新与实践 2022年7期
摘要:在工业生产过程中,机械臂通常也被叫做工业机器人,是能够帮助很多工厂实现现代化道路的重要设备之一。为了工业的发展跟祖国的繁荣富强,对工业机器人的研究和投入使用具有很高的价值和现实意义。
关键词:机械臂;控制;设计
1、手臂系统简介
机械手臂是一种新兴智能化机械设备,可以准确接收指令并自动完成,具有较强的智能性与高效性。机械手臂的工业生产中的广泛使用可以有效规避安全风险,大大提升生产效率与产品质量。有鉴于此,此次研究将针对机械手臂的动态抓取机理进行细致分析,将其应用到机械手臂的设计中,旨在构建出更加高效的机械手臂系统设计方案。
2、系统设计
2.1 硬件设计
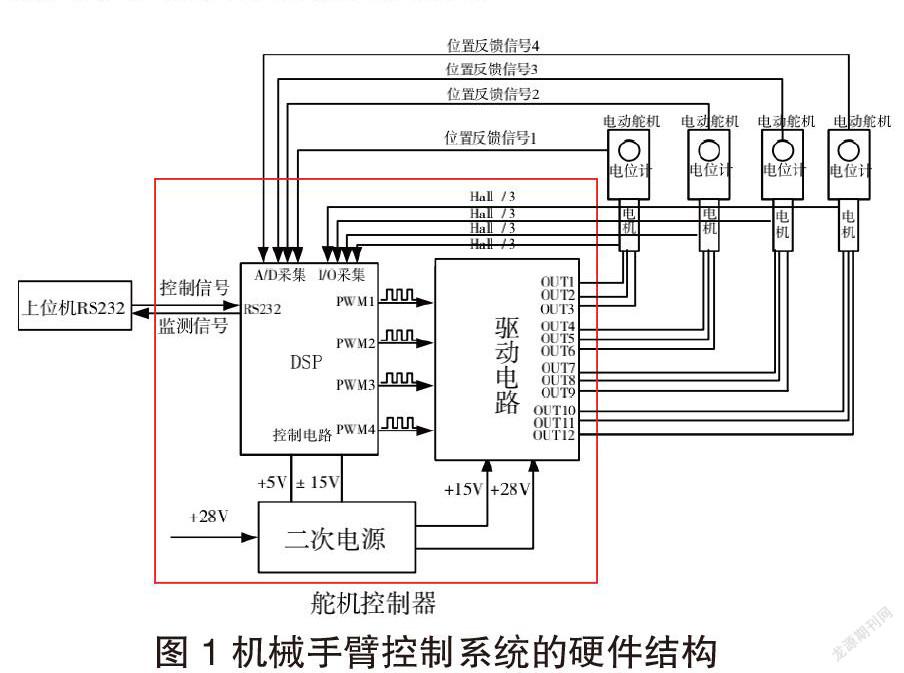
根据以上机械手臂运动控制系统的功能,机械手臂的运动控制系统硬件可分为上位机、DSP 芯片及其外设电路、电机驱动电路、电源模块、舵机模块以及数据采集模块,如图1所示。主控模块主要由DSP2812控制器及外围电路组成。位置传感器监测机械手臂的位置以及运转角度,实时采集机械手臂的运动信号,反馈给DSP芯片。[1]DSP 芯片再通过与上位机的指令信号比对,通过积分分离 PID 控制策略进行计算处理,精确调节占空比对 PWM 进行输出控制,从而输出给驱动电路,驱动舵机进行转动调节,进而实现对机械手臂的精准运动控制。用户不仅通过上位机将运动指令(控制信号)传输到 DSP,同时 DSP 也将监测到的机械手臂实时位置信号送回到上位机进行显示。[2]
2.2 软件设计
DSP 软件设计是整个系统设计的关键部分之一,系统的功能以及控制算法最终要通过 DSP 软件来实现。根据机械手臂运动系统的工作原理,系统软件主要完成以下工作。
(1)采集上位机用户的指令信号和机械手臂实时位置反馈信号。
(2)实现误差计算和积分分离 PID 控制算法。
(3)计算 PWM 波的占空比。
程序采用模块化设计,以 C 语言和汇编语言混合编程实现。主程序主要有系统的初始化、A/D 信号采集、PID 控制算法以及 PWM 波的占空比计算等4个模块。系统的初始化是对各硬件单元的 I/O 口、寄存器以及初始角度等给定一个初始值,为系统运行做好准备。信号采集模块主要是对舵机运动轨迹位置的反馈采集,这是闭环控制的重要环节,反馈信号的准确性直接影响了机械手臂运动过程监督的准确性,并且对芯片有效计算出控制量起着至关重要的作用。在数据处理阶段,本文采用积分分离 PID 算法作为机械手臂运动控制系统软件单元的控制策略,用于对运动轨迹执行的控制量进行快速准确处理。通过对 PWM 波占空比的计算,输出控制电流给驱动電路,完成对舵机的控制。
3、算法设计
3.1建立运动学模型
具有三维开环链结构的机械手分别由基座、增幅臂和旋转手臂组成,可通过肩部旋转和俯仰、肘部和腕部俯仰、腕部偏转和旋转6个旋转关节实现 6 个自由度的运动,进而保证机械手在工作空间中的所有位置状态。[3]
建立参考坐标系和关节坐标系,再用齐次方程描述机械臂各连杆的空间几何关系,用4×4齐次矩阵来表示相邻连杆之间的几何关系,再算出机械臂相对于参考坐标系的后端地址。鉴于该坐标系中存在偏移量α1和 α2,故x1、x2 和 x3 的空间关系并不重合。
3.2运动控制算法
运动轨迹和速度是机械臂两大控制变量,轨迹控制算法是机械臂控制系统的最关键部分。相对于二维轨迹控制算法,六自由度轨迹控制算不是二维插补算法的简单组合,综合曲线特征,采用分段曲线逼近拟合轨迹曲线。为了提高拟合度,须精确计算出各段曲线交点值,以保证运动状态参数的连续性。考虑到既要使机械臂能沿着既定的轨迹运动,又要确保运动过程中的实时可控性,本文采用Trial Mode运动模式的控制算法,即通过阶梯形分割其速度曲线,在每个采样周期内分段进行提取设计,确保对插补算法指定轨迹进行约束。
4、总结
计算机技术的发展蒸蒸日上,其应用范围也愈来愈广,工厂中的机械设备与计算机技术进行有机的结合,大量智能化的机械设备不断涌现,其中机械手臂是应用最为广泛的工业设备之一。为了对机械手臂的动态抓取功能进行优化,提升工业生产的效率,对机械手臂的运作机理及其伺服电机等方面进行深入的探析与实验,显著提升其工作性能。此次研究尽管有幸取得一定的成果,但受到实验条件的限制,得出的结果不够全面,希望在未来的研究中能够进行更加深入且全面的实验分析。
参考文献:
[1] 孙龙飞,房立金.机械手臂结构设计与性能分析[J].农业机械学报, 2017.
[2] 钱东海,王新峰,赵伟等.基于旋量理论和Paden-Kahan子问题的6自由度机器人逆解算法[J].机械工程学报,2009.
[3] 喻学涛.机械手臂转角自动控制器设计与改进[J].现代电子技术,2017.
作者简介:夏明(1996.05-),山东交通学院本科学生,指导老师:李光。
猜你喜欢
中国品牌(2020年11期)2020-12-23
Coco薇(2017年5期)2017-06-05
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
科技视界(2016年21期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
Coco薇(2015年12期)2015-12-10
