
前馈控制加模糊补偿的机器人关节角度追踪
2022-06-28 09:38蒲明辉赵倩倩潘海鸿
机械设计与制造 2022年6期
蒲明辉,赵倩倩,陈 琳,潘海鸿
(1.广西大学机械工程学院,广西 南宁 530004;2.广西制造系统与先进制造技术重点实验室,广西 南宁 530004)
1 引言
机器人能将人类从众多繁重的劳动中解放出来,主要原因之一是其可以按照人类规划的关节角度运动[1-2]。机器人通过控制系统将规划关节角度转化为电机输出的关节控制力矩,从而带动其关节按照规划角度转动。但由于机器人模型存在不确定性,即理论参数不能精确测量得到以及实际工作过程中存在环境干扰等,导致机器人关节的实际运动角度和规划角度之间存在误差[3-4]。
为减小由于机器人模型不确定性造成的关节角度追踪误差,提高机器人的关节角度追踪精度,研究人员提出了多种控制方法。
(1)PID控制方法:它不需要建立机器人模型,且具有较好的关节角度追踪精度,在实际控制中得到广泛应用。但其控制参数难以调节,需要较多的实验进行调整和修改[5];(2)自适应控制方法:它可以及时修正自己的特性来适应机器人建模误差及外界环境干扰,但需要较为复杂的计算[6];(3)鲁棒控制方法:它可以实现对机器人不确定性的补偿,不需要制定自适应律,实现较为简单,但其指标的设定和权函数的选取过于依赖设计者的经验[7];(4)神经网络控制和模糊控制等智能控制方法:这些智能控制方法具有高度的非线性自适应能力,可以实现对机器人未知部分的精确补偿[8]。
以上方法有效减小了机器人不确定性造成的关节角度追踪误差,但各自也都存在一定的不足。为弥补上述控制方法的不足,进一步提高机器人的关节角度追踪精度,研究人员将多种控制方法相结合。文献[9]提出一种基于模糊控制的鲁棒自适应轨迹跟踪方法,在传统自适应控制的基础上加入模糊控制减小机器人关节角度初始误差,并使用鲁棒控制补偿机器人模型的不确定性,实现了对不确定性机器人的有效控制。文献[10]提出一种自适应神经变结构控制方法,采用径向基函数神经网络算法补偿系统的不确定性,使控制系统具有较强的鲁棒性。文献[11]提出一种前馈和PID结合的控制方法,与传统的PID方法相比,该控制方法鲁棒性更强,且收敛时间较短。上述方法虽然取得了很好的成果,但仍存在一些问题需要完善。例如,其初始阶段误差波动较大,需要一定的时间才能使机器人的实际关节角度收敛到规划关节角度。
针对上述问题,提出一种前馈控制加模糊补偿的控制方法。前馈控制器利用机器人动力学模型获得前馈关节力矩,模糊补偿控制器获得关节补偿力矩,二者共同作用于机器人。利用ADAMS和Matlab/Simulink建立联合仿真模型,并与前馈和PID结合的控制方法比较,验证了所提出控制方法的可行性。
2 机器人动力学模型
机器人的关节力矩取决于机器人参数及其关节运动状态,不考虑机器人建模误差及环境干扰等不确定因素,利用Lagrange方法建立n自由度机器人标准动力学方程[6]:

式中:τ—机器人关节力矩,τ∈Rn;θ、θ、̇θ̈—机器人的关节角度、角速度和角加速度,θ、θ、̇θ̈∈Rn;D(θ)—机器人的惯性矩阵,D(θ)∈Rn×n;C(θ,θ̇)—机 器 人 的 离 心 力 和 科 氏 力 矩 阵,C(θ,θ̇)∈Rn×n;G(θ)—机器人的重力矩阵,G(θ)∈Rn。
二自由度机器人控制是多自由度机器人控制的基础,以二自由度机器人为例,验证所提出控制方法的可行性,其简化模型,如图1所示。

图1 二自由度机器人简化模型Fig.1 Simplified Model of Two Degree of Freedom Robot
根据图1建立二自由度机器人标准动力学方程,则式(1)中各部分表达式如下:


式中:τ1、τ2—关节1和关节2的力矩—关节1和关节2的角速度及角加速度;其它变量,如图1所示。
3 控制系统
提出的控制系统包含前馈控制器和模糊补偿控制器两部分。前馈控制器输出前馈关节力矩τd,模糊补偿控制器输出关节补偿力矩τf,最终获得机器人关节控制力矩τz:

3.1 前馈控制器
前馈控制器的作用是对下一运动状态需要的关节控制力矩值进行估计,并使用该估计值对机器人进行提前控制,减小可能出现的误差。由第2节可知,机器人的关节力矩与机器人的参数及运动状态有关。将机器人的规划关节角度θd、角速度和角加速度代入式(1)可获得关节控制力矩的估计值,即前馈关节力矩,表达式为:
3.2 模糊补偿控制器
为控制机器人按照规划关节角度转动,设计一种模糊补偿控制器获得关节补偿力矩对前馈关节力矩进行补偿,如图2 所示。首先,利用模糊控制[12]获得关节力矩补偿系数;然后,该补偿系数与前馈关节力矩τd相乘得到关节补偿力矩τf,如式(7)所示。

图2 机器人控制框图Fig.2 Control Block Diagram of Robot

式中:u—关节力矩补偿系数;e—关节角度误差,e=θd-θ;ec—关节角度误差变化率,即关节角速度误差,ec=θ̇d-θ̇。
图2中,模糊控制的输入量为e和ec,输出量为u,采用三角形隶属度函数对输入量和输出量进行描述,将模糊论域分为七个模糊子集,即NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大),如图3所示。

图3 隶属度函数Fig.3 Membership Function
考虑力矩补偿系数与机器人关节角度误差及误差变化率之间的非线性关系,根据控制经验建立一套完整的模糊控制规则,如表1所示。

表1 模糊规则库Tab.1 Fuzzy Rule Base
最后,采用“If—Then”语句进行模糊推理,利用重心法解模糊,获得关节力矩补偿系数u,将其代入式(7),得到关节补偿力矩。关节补偿力矩与前馈关节力矩共同控制机器人按照规划关节角度转动。
4 仿真分析
4.1 仿真模型
在Matlab/Simulink中建立二自由度机器人关节角度追踪控制模型,其建模参数为具有测量误差的实测值。控制模型充分考虑机器人的建模误差和环境干扰。以ADAMS 中建立的模型代替机器人本体,建模参数使用理论值。理论值和实测值,如表2所示。

表2 机器人参数Tab.2 Robot Parameters
设计环境干扰模型,如式(8):

式中:τq—环境干扰力矩;t—时间;a—Matlad/Simulink 生成的随机数。
将ADAMS和Matlab/Simulink结合,对所设计控制方法进行仿真。仿真模型,如图4所示,图4中的模糊控制,如图5所示。
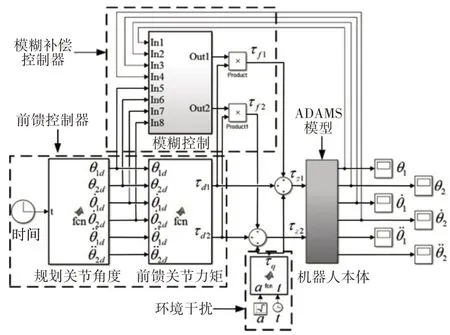
图4 联合仿真模型Fig.4 Joint Simulation Model

图5 模糊控制框图Fig.5 Block Diagram of Fuzzy Control System
4.2 仿真结果分析
4.2.1 规划关节角度
规划关节1在(0~4)s从0 rad运动到1/3 rad,(4~8)s从1/3 rad 返回到0 rad;规划关节2 在(0~4)s 从0 rad 运动到-2/3 rad,(4~8)s从-2/3 rad返回到0rad。机器人一般做周期性往复运动,为保证转向的平稳性,要求在0 s、4s和8s时,两关节的角速度和角加速度均为0。以5次多项式规划机器人关节角度,关节1和关节2的规划角度如式(9)、式(10)。所规划的关节角速度和角加速度由规划关节角度求导获得,因此不再一一列出。

4.2.2 仿真结果分析
将规划关节角度代入仿真模型,得到机器人实际关节角度对规划关节角度的追踪曲线以及关节角度追踪误差,如图6实线所示。
采用同样的规划关节角度,使用文献[11]中的前馈和PID结合的控制方法,其关节控制力矩如式(11)所示。

取KP1=2×106;KP2=2×105;KI1=KI2=104;KD1=KD2=104;仿真结果,如图6虚线所示。

图6 关节角度追踪曲线及误差Fig.6 Tracking Curve and Error of Joint Angle
仿真结果表明,在机器人存在建模误差和环境干扰的情况下,利用两种控制方法均能使机器人追踪规划关节角度,其中利用前馈和PID结合的控制方法,机器人实际关节角度约0.5s才能收敛到规划关节角度,稳定后的误差绝对值大于1×10-3rad。利用所设计控制方法,实际关节角度不存在波动,且其误差绝对值始终小于1.5×10-4rad,约为前馈和PID结合控制方法最小误差的七分之一。证明采用前馈控制加模糊补偿的控制方法对减小关节角度收敛时间是有效的。
5 结论
提出一种前馈控制加模糊补偿的关节角度追踪控制方法,实现了不确定性机器人关节角度的及时追踪。采用基于动力学模型的前馈关节力矩减小可能出现的角度追踪误差。采用模糊控制计算关节力矩补偿系数,进一步获得关节补偿力矩,对角度误差进行补偿。仿真结果表明,该控制方法得到的实际关节角度值无波动,且误差绝对值小于1.5×10-4rad,具有良好的关节角度追踪效果。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
上海理工大学学报(2021年3期)2021-07-20
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
山东青年(2016年12期)2017-03-02
人生十六七(2016年14期)2016-12-01
电子制作(2016年21期)2016-05-17
电子制作(2016年21期)2016-05-17
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
