
三维激光扫描技术在地下空间测量中的应用
2022-07-08 03:27李嘉禾李国柱赵子龙陈舫益
城市勘测 2022年3期
李嘉禾,李国柱,赵子龙,陈舫益
(1.昆明理工大学国土资源工程学院,云南 昆明 650093; 2.云南海钜地理信息技术有限公司,云南 昆明 650106;3.云南省测绘产品检测站,云南 昆明 650034)
1 引 言
随着大量人口涌入城市,导致城市规模的不断扩张,许多城市对空间的利用要求也相对提升。目前对城市地下空间的开发也愈发得到青睐,地下交通设施、地下人防、地下停车场、大型地下商场这些多样化的地下空间的数量迅速增加。地下空间测量能为地下空间的管理提供空间规模、用途、位置等基本数据支持,同时可为后期室内定位提供基础数据。精准快速地获取地下空间数据十分必要,因此高效的地下空间测量方法显得尤为重要。
三维激光扫描技术作为近年来新兴的一门测绘技术,可以快速高效地获取高密度的点云数据,并重建目标的三维模型,已在古建筑保护、考古测量、工业制造、结构测量、河道测绘、桥梁、建筑物地基测绘等方面得到广泛应用[1]。与传统测量方法相比,三维激光扫描技术无须接触目标,可以快速准确地获取目标数据,且具有密度高、精度高等特点[2]。适用于大面积及复杂表面物体的测量和物体局部细节的测量,以及目标表面、截面、断面、体积、等值线等的计算,为测绘人员突破传统测量技术提供了一种全新的数据获取手段。并且,三维激光扫描技术可以深入到复杂环境中进行扫描操作,大面积、高分辨率的快速获取被测对象表面的三维坐标数据[3]。将三维激光扫描技术应用于地下空间测量中,可以更好地获取地下空间数据,提升工作效率。
2 数据采集
2.1 RTC360地面三维激光扫描仪
RTC360三维激光扫描仪融合了徕卡三大核心先进技术:TruRTC实景复制技术、VIS视觉追踪技术、SmartReg智能拼接技术,使RTC360三维激光扫描仪与徕卡FIELD 360外业操控软件、REGISTER360智能拼接软件完美结合,设备轻便,操作简单,是一套集智能、简单、高效、极速于一体的三维激光扫描仪[4]。RTC360配备的3个 1 200万像素的HDR全景相机,拍照只需要一分钟,成像清晰,且不受环境光源的影响,可以满足不同场景的应用需求,其最高点位精度达到 1.9 mm,测角精度18″,测距精度1 mm+10 ppm,最大有效范围 130 m,扫描速率高达 2 000 000点/s。基于RTC360三维激光扫描仪的地下空间测量总体流程如图1所示:

图1 整体流程图
2.2 控制测量
为了将采集的点云数据转换到指定坐标系下和对点云数据质量进行检查及精度验证,首先需要进行控制测量。项目分为地面控制和地下控制两部分。地面采用网络RTK方式布设平面二级点,采用四等水准测量方式进行高程测量;地下控制采用导线方式施测。点云数据的坐标转换选用分布相对均匀的地下空间出入口(≥2个)地面控制点进行转换至目标坐标系统。
2.3 点云数据采集
在使用RTC360进行点云数据采集时,主要使用的是其VIS功能和智能拼接功能。RTC360利用其分布于四周的5个相机,可以对测站进行视觉追踪,辨别测站的行进方向,并进行测站的定位。配合IMU实时计算两个连续站点间的相对位置,通过智能拼接功能可对测区内的测站实现扫描过程中的实时自动拼接,极大地提高了工作效率。
扫描作业时,基于IMU的倾斜补偿和其内置的测高仪,RTC360无须整平可直接进行测量。为了保证拼接精度,每站扫描保持20%以上重叠度,扫描时需按照现场的实际情况控制测站间的距离,测站间距一般控制在 10 m~50 m之间,视野受限时可适当减小测站间距,为避免扫描盲区,在地下空间转角处应设站扫描。扫描单个地下空间时,其内部扫描的控制点或导线点的个数应不少于3个。扫描控制点和导线点时,可进行多方位的扫描,这样可以有效地提高整体的精度。在光照条件极差的环境中,RTC360的VIS功能失效,可用徕卡FIELD 360软件进行测站的实时关系连接,并且可以通过该软件实时查看扫描成果,实现对数据质量的检查。
3 数据处理
点云数据预处理步骤包含点云配准、点云去噪、点云抽稀。点云数据配准常采用Besl和Mckay在1992年提出的最近邻迭代配准(iterative closest point,ICP)算法实现对两个扫描站的拼接,ICP算法是一个迭代优化过程,用于寻找两个三维表面点集最优匹配的刚性变换[5]。
规则地下空间场景,RTC360三维激光扫描仪及配套的REGISTER 360智能拼接软件能实现点云数据的自动拼接。在点云数据预处理时,无须再进行点云配准,自动拼接后只需对点云数据进行目视检查,防止不同角度上的空间剖面存在分层、错位、镜像等与实地情况不匹配的现象,应特别注意如楼梯间、设备间这类相似特征较多的房间进行连续扫描所获得的数据,必须对自动拼接后的成果进行检查,并对其拼接精度进行验证,确保点云的拼接精度达到项目要求。点云配准精度如表1所示,其中重叠度表示两测站或整体点云模型中的重复量,强度表示的是点云数据的反射率,点云到点云表示的是点云模型中相似点云间的拼接误差。点云配准精度如表1所示:

点云配准精度 表1
3.1 点云去噪
非封闭空间扫描易受到外部因素的影响,如移动的车辆和路过行人以及其他构筑物等非目标地物的存在对目标地物的遮挡[6],或是目标物附近的强光源和强反射物,以及人为操作失误的影响,都会导致扫描得到的原始点云数据中某些关键部位存在大量冗余点和缺失数据,因此在数据预处理中需要对原始数据进行点云去噪处理。
利用Leica Cyclone点云处理软件中的点云过滤功能,可以去除点云数据中较为独立、无关联性的噪点。对于点云数据中独立的大范围冗余点云,可以通过人工交互操作,转换不同视角,实现冗余点云的剔除。如图2所示,两个白色方框中的点云数据即为冗余点云,在Cyclone软件中框选并删除相应位置的点云数据,即可完成点云数据中独立的大范围冗余点云的去除,去除冗余点云后的效果如图3所示。另外,对于点云数据中与其他点云数据相关联的冗余数据或噪点,不能直接框选删除,如图4所示,红色圆圈中为镜面反光所产生的噪点数据,无论旋转什么视角,框选删除都会影响到其他点云,对于这类数据需要先用Cyclone软件中的LimitBox功能处理,再对数据进行删改,删除噪点后的点云数据如图5所示。
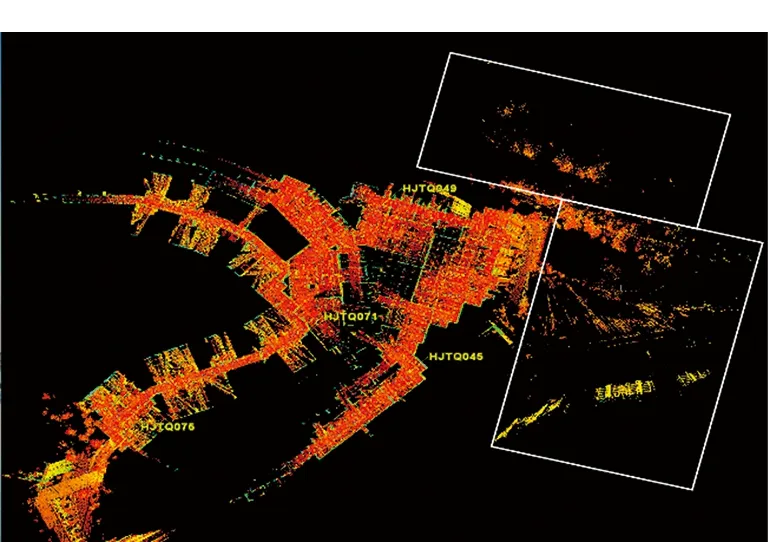
图2 去除冗余数据前点云图

图3 去除冗余数据后点云图

图4 去噪前点云图

图5 去噪后点云图
3.2 点云抽稀
在使用徕卡RTC360进行地下空间测量时,即便使用的是最低精度的扫描模式,但由于其高达200万点每秒的扫描速率,还是会使点云数据的规模过于庞大。为了降低后期点云处理和建模过程中的数据运算量,需要对点云数据进行抽稀,使得点云数据更加均匀,提高建模的精度和效率[7]。Leica Cyclone点云处理软件中的点云抽稀功能,可以自由设置抽稀的密度,软件会根据设置的抽稀密度优化整个点云模型,抽稀前的点云数据如图6所示,点云密度大并且可以看出有一定的点云厚度,抽稀后的点云数据如图7所示,点云密度及点云厚度都被很大程度地降低,但整体点云模型的框架没有发生改变,以此来达到精简数据的目的。

图6 抽稀前点云图

图7 抽稀后点云图
3.3 点云数据坐标转换
在进行地下空间测量时,由于使用的三维激光扫描仪无法在绝对坐标系下进行测量,因此测得的点云数据都是在相对坐标系下的数据。为了实现任意坐标系与项目要求的目标坐标系的统一,需要将点云数据转换到指定的坐标系下。坐标转换通过公共点(公共标靶)来计算转换参数,转换过程通常利用布尔莎7参数模型,即3个平移参数[△X,△Y,△Z]T,3个旋转参数[εX,εY,εZ]T和1个尺度参数m,无单位[8]。本项目的点云数据坐标转换在REGISTER360智能拼接软件或者Leica Cyclone点云处理软件中完成,转换坐标主要通过分布相对均匀的地下空间出入口(≥2个)地面控制点作为标靶点坐标来求转换参数,进而完成点云模型整体的坐标转换。
3.4 点云数据矢量化
根据项目需求对点云数据进行轮廓提取,轮廓线的提取可以借助于AutoCAD软件,也可以通过编程或借助于点云处理软件或三维建模软件来完成[9]。化蕾[10]利用AutoCAD软件中的KubitPointcloud插件所提供的分层切片技术来完成建筑轮廓线的提取。张远翼[11]通过Leica Cyclone点云处理软件中配套的Coudworx插件将点云模型导入AutoCAD中进行点云模型的切片,并对切片后的点云进行建筑轮廓线的提取。
本项目使用的是清华山维EPS软件,利用软件中的点云处理模块对轮廓线进行提取,进行点云数据轮廓提取前仅需将点云数据格式转化为EPS软件识别的格式。处理后的点云数据可作为地下空间矢量化的基础数据,从点云数据中可以准确地获得地下空间的实际情况,如地下空间范围、安全通道的走向、地下空间各种设施的分布情况,以及地下空间顶部管道的位置走向等,甚至可以提供准确的宽高等几何尺寸信息,获得的矢量图还可以在后期的三维建模中作为底图使用。根据项目需求,地下空间测量范围包含夹层及内部通道,矢量化后的数据如图8所示:

图8 矢量化成果图
4 精度分析
徕卡RTC360在扫描过程中使用了IMU倾斜补偿技术和VIS视觉追踪技术实现了点云数据采集过程中仪器的自动定位定姿,后期点云数据的拼接也在REGISTER360智能拼接软件实现了一体化的自动拼接,因此在软件内点云数据的拼接精度可以直接在REGISTER360智能拼接软件或Leica Cyclone点云处理软件中查看。
本次的地下空间测量项目中,首先通过闭合导线或附合导线测量的方式获取地下空间内图根控制点,之后通过传统测量的方式对测区内的特征点进行实地测量,以传统测量测得的数据作为真值与三维激光扫描仪测得的数据相对比,以此达到精度检验的目的,其中特征点主要包括墙面或者结构柱的角点、地下通道出入口的位置和地下空间出入口的地坪高度等。本文利用全站仪和测距仪对抽样的地下空间测量多组特征点坐标以及特征物体的宽高和高差值作为检验数据,利用Leica Cyclone点云处理软件对点云模型中的多组距离和高差进行量测。考虑偶然误差因素,内业对同一特征点的量测取3次测量的平均值作为量测值。将全站仪和测距仪测量的数据视为检验数据的真值,将点云模型的量测值视为检验数据的观测值,结果如表2、表3所示。根据全站仪和测距仪测量的数据与点云中的数据对比得到结果表明,通过点云测量得到的数据能够满足地下空间普查项目的需求。

全站仪与扫描仪测量值 表2

测距仪与扫描仪测量值 表3
5 结 语
本文分析了利用徕卡RTC360三维激光扫描仪进行地下空间测量的操作过程,对该方案中需要注意的事项进行了说明,并通过精度统计验证了该方案的可行性。运用徕卡RTC360三维激光扫描仪能够快速获取地下空间的点云数据,通过REGISTER360智能拼接软件可实现点云的无标靶自动拼接,且其相对精度较高,很大程度上提高了地下空间测量的工作效率。而且通过Leica Cyclone点云处理软件生成的点云数据可与市面上常用的二次处理软件兼容,点云数据的开发性较强。
但是在点云数据处理中,由于点云数据的规模庞大,因此对数据处理设备的要求较高,且数据冗余问题会直接影响点云数据预处理的效率,同时会增加点云数据格式转换时的工作量。这些问题还有待在后续的研究中进一步解决。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
现代仪器与医疗(2022年2期)2022-08-11
测绘地理信息(2022年2期)2022-04-02
煤(2022年2期)2022-02-17
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
职业·中旬(2009年12期)2009-06-01
