
基于PCA算法的隧道点云横断面特征提取研究
2022-07-08 05:41陈艳华丁鸽
城市勘测 2022年3期
陈艳华,丁鸽
(1.济南市房产测绘研究院,山东 济南 250001; 2.济南市勘察测绘研究院,山东 济南 250013)
1 引 言
三维激光扫描技术不断发展、完善,国内研究如火如荼,近十年来国内三维激光扫描技术在建筑制图、城市规划和基础测绘等方面都取得了显著成果,此外,在岩土滑坡、大坝的动态安全监测中也得到广泛应用。
Darion Grant2012年提出无须任何标靶点配准的新方法——P2P方法在模拟和真实三维扫描数据得到验证,结果显示配准精度相对1991年Chen和Medioni提出的方法提高了四倍[1]。Zahra Lari2014年利用扫描点云的内部属性,通过不同类型特征的属性信息对点云进行分类,实例验证了提取直线特征的自适应方法的可行性[2]。冒爱泉,朱益虎等2014年利用高精度检校场通过全站仪与三维激光扫描仪Leica C10测量结果对比评定其精度[3]。Shahar Barnea等2007年在没有先验信息的前提下提出点云配准的方法,通过提取点云集的特征子集降低了搜索全部配对点集的不确定性,提高了点云配准的精度,该方法可应用于多站扫描点云配准[4]。Marko Pejic等2014年基于ISO17123通用标准对三维激光扫描仪的精度进行测试,指出控制点多于三个时再增加控制点个数对转换精度没有明显提高[5]。2011年王玉鹏,卢小平等经过严密检校场实验得出Leica ScanStation2型扫描仪的点位精度在 40 m和 80 m分别为 ±4.7 mm、±6.3 mm,该方案利用因瓦尺的精密刻度,采用前方交会及三角测量方法对标靶点扫描提取坐标,验证了实际环境扫描精度达到标称精度 ±6 mm@50m[6]。2013年谢雄耀,卢晓智等将地面三维激光扫描技术用于隧道相对变形测量,以上海市西藏路电力隧道和长江西路公路隧道为例采用6测站和12个标靶拼接了全断面模型,证明三维激光隧道扫描结果与全站仪测量结果相差 2 mm以内,保证了三维激光扫描技术应用于隧道安全监测的可靠性[7]。2020年朱璟,付建红在复杂的铁路场景下,提出了针对三维激光点云被遮挡或缺失情况下的稳健铁路中心线计算方法,在既有线高精度勘测中具有广泛应用前景[8]。
2 三维激光扫描原理
三维激光扫描仪采用多点测量原理,通过全景扫描获取目标的三维信息,包括点云空间数据、颜色、反射强度等信息。以原点向任意方向发射激光信息,获取目标反射扫描点P的三维坐标(X,Y,Z)为:
(1)

图1 三维激光扫描测量原理示意图
本文实验采用的RIEGL VZ-400三维激光扫描仪通过无接触扫描对象方式采集点云数据,其主要参数指标如表1所示:
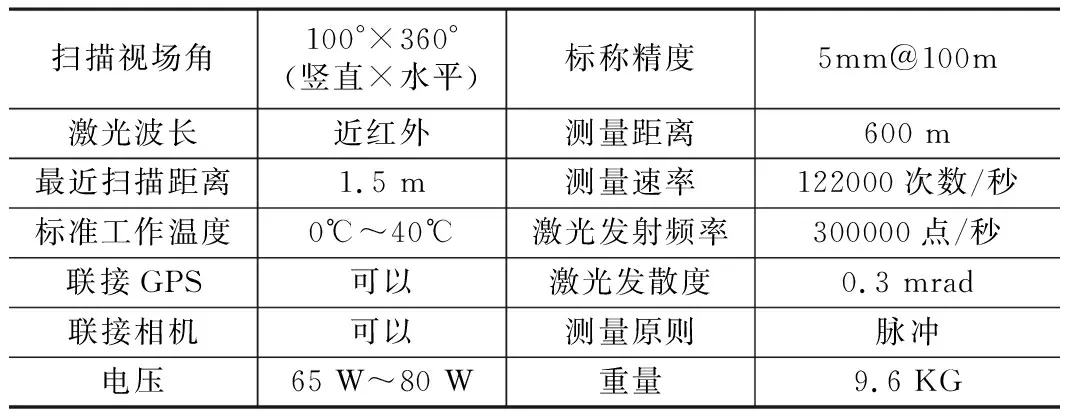
RIEGL VZ-400扫描仪主要参数指标 表1
3 LS-PCA组合分析方法
最小二乘方法,通过误差平方和最小化计算变量之间的最佳函数匹配关系,该方法在进行数据拟合时,将所有数据均用于运算,使得结果受到某些“不利”数据的影响[9]。Hoppe提出利用PCA评估每个采样点“临域”,并进行平面拟合和法向量计算的方法[10],PCA可以理解为最小二乘的几何优化或等效于最大似然估计,并在精度和效率上优于最小二乘方法,因此,该方法在平面拟合上得到广泛的应用。本文将两种算法进行结合,解决了点云数据中“不利”因素的影响,提高了特征提取的精度。
3.1 最小二乘法
假设三维平面点数据为{Pi(xi,yi,zi);i=1,…,n},拟合平面定义为:
ax+by+cz+d=0
(2)
式中a,b,c是平面参数,d为平面三维扫描数据点到拟合平面的距离,该距离可表示为z=f(x,y),则z方向的方差累积最小化表示如下:
(3)

(4)
(5)
3.2 主成分分析法
对3D点云数据{Pi(xi,yi,zi);i=1,…,n},n个点的协方差矩阵为式(6):
(6)
设平面方程为:
xcosα+ycosβ+zcosγ+p=0
(7)
ax+by+cz=d,a2+b2+c2=1
(8)
cosα,cosβ,cosγ为平面上点(x,y,z)处的法向量方向余弦,|p|为原点到平面的距离。式(7)转化为式(8),求平面方程转化为求a,b,c,d四个参数。任一数据点(xi,yi,zi)到该平面的距离为:
di=|axi+byi+czi-d|
(9)
(10)
将f分别对4个未知参数a,b,c,d求偏导,将参数d带入(10)得公式(11):
(11)
(12)
由上式可得求解位置的参数(a,b,c)T为系数矩阵的一个特征向量,对应特征值λ,该系数矩阵即为协方差矩阵的等价公式。由式(8)和特征方程Ax=λx得出式(13)。
(13)
3.3 LS-PCA组合分析法
(1)利用最小二乘方法拟合平面获得平面公式ax+by+cz+d=0,求得平面点云各点到拟合平面的距离d。
(2)计算拟合平面点云由(1)求得的距离d的中误差σ,当各点距离di>2σ,删除该点,否则保留。
(3)对去除噪声的点云数据利用主成分分析方法拟合,以获得拟合平面的参数。
(14)
3.4 实验设计
选取38 cm×38 cm的塑料、木板做扫描对象,采用RIEGL VZ-400扫描仪,设置扫描分辨率为 2 mm、5 mm、1 cm,扫描距离为 50 m,木板点云数据的边缘噪声明显,如图2所示,利用LS和LS-PCA方法分别进行拟合,得到拟合结果对比如表2所示。
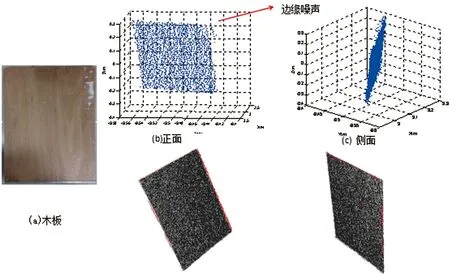
图2 木板、木板点云及边缘噪声
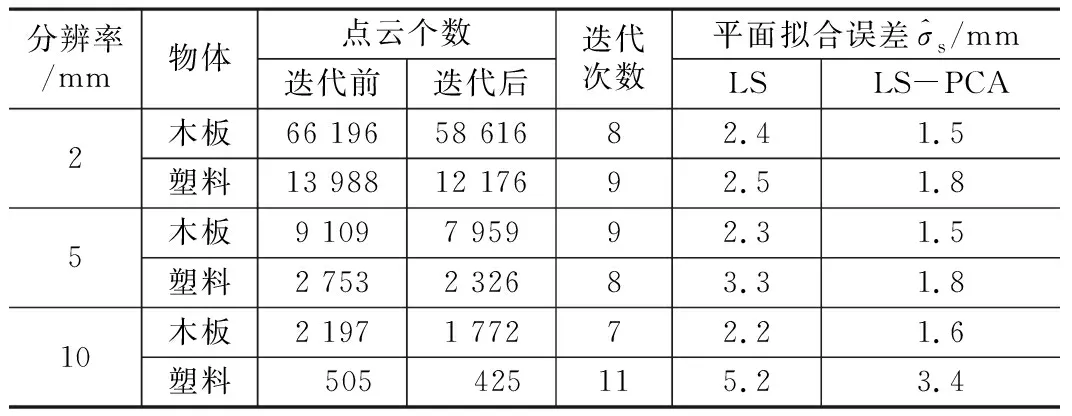
点云平面拟合计算结果 表2
从图2和表2看,木板的“边缘噪声”较为明显,扫描仪的工作机制为发射激光束,物体表面反射信号回扫描仪,其中反射物体表面因不平滑出现“漫散射”,边缘因入射角较大、激光束信号强度较弱,扫描仪的精度受限,因此,在扫描物体边缘时采用不同分辨率,对较为光滑的平面(如木板)采用较大采样间隔,对较为粗糙的平面(如塑料)采用较小采样间隔以减少边缘效应对扫描质量的影响。
从表2中看出,LS-PCA算法的迭代次数大致相同说明该算法有较好的稳定性,平面拟合误差较小说明该算法有较好的拟合精度。同时,扫描对象表面越粗糙、扫描分辨率越大,算法的平面精度越差,对不同粗糙程度的拟合效果也显示出本算法有较广泛的适用性。
4 隧道点云横断面特征提取案例
李健,万幼川等将三维激光扫描技术用于地铁隧道的监测,在保证特征信息的情况下,对扫描的点云运用基于法向量差异的分割算法简化,构建模型,该方法提高了运算速度和精度[11]。本文方法主要针对侧面、地面为平面的隧道,通过对各几何平面的特征信息的整合计算断面的平面位置,隧道点云截取部分如图3所示,具体流程如下:

图3 隧道扫描实验场
(1)将仪器架设在隧道断面中心位置,对中整平,全景扫描隧道,截取部分扫描点云如图3右图所示;
(15)
(4)计算点云到基准平面的距离截取所需任何位置、任何宽度(点云区域范围内)的横断面。
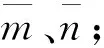
利用上述方法获得某一测站横断面如图4所示,其中左图距扫描仪中心位置 6 m,横断面宽度为 0.2 m,4个横断面的位置范围分别为[5.9,6.1]、[6.9,7.1]、[7.9,8.1]、[8.9,9.1](单位为m)。右图距扫描仪中心位置 6 m,横断面宽度 0.5 m,3个横断面的位置范围分别为[5.75,6.25]、[6.75,7.25]、[7.25,8.25](单位为m)。
图4 点云横断面示意图
5 结 语
三维激光扫描点云数据存在大量“边界噪声”,最小二乘方法拟合平面时包含了所有三维点集,导致拟合方差较大、效果较差。主层次分析(PCA)法对边界噪声点云影响较为敏感,通过降维能够提取出隐含的数据本质内容。本文结合两种方法的优势,通过实验验证了最小二乘——主成分分析(LS-PCA)方法的适用性和可行性,对隧道点云特征平面拟合提取任意横断面点云提供了新思路,为三维激光扫描技术在隧道点云特征提取应用中提供了指导意义。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
现代仪器与医疗(2022年2期)2022-08-11
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
中国医学创新(2017年3期)2017-02-22
环球人文地理·评论版(2016年8期)2017-01-19
建筑建材装饰(2016年14期)2017-01-05
中国动物保健(2015年4期)2015-10-21
中国高新技术企业(2015年25期)2015-07-24
现代营销·经营版(2015年3期)2015-04-20
