
基于能量管理的太阳能无人机航迹规划
2022-07-11 01:13何子清
电子技术与软件工程 2022年4期
何子清
(中国人民解放军63869 部队 吉林省白城市 137000)
1 引言
自20 世纪70 年代以来,太阳能飞机已经发展了一段路,国内外一直都在研究高空长航时的问题,例如美国的第一架太阳能无人机“Sunrise I”,英国的“微风”(Zephyr)太阳能无人侦察机,国内的有无人机特种技术重点实验室的周洲老师,研制出一款“太阳能WIFI 无人机”,续航时间可达十几个小时。然而,太阳能的持续飞行是有挑战性的,仍然存在难以解决的问题,需要技术的进步,包括轻型飞机的设计,能量的转化和存储,以及飞行控制和航迹的优化。
本文研究的目的通过改变飞机的飞行姿态以及飞行速度来增加获得的能量,并通过使用从控制飞行高度获得的重力势能来提高飞行耐力。整个飞行过程中,需要一个最佳的飞行路径,通过增加所获得的能量的数量和减少用于推进的能量来确保长期的耐久性。白天飞行主要是吸收太阳光的能量,目的是飞机能够在飞行消耗能量的同时,为安全度过夜晚提供能量来源。通过建立每个飞行阶段的能量函数,得出影响能量存储的变量,通过飞行制导律使每个阶段的能量函数最大。
2 问题描述
太阳能飞机在飞行过程中,首先要考虑的是太阳的位置,为了增加太阳光的吸收率,飞机的航向始终与太阳保持一致,且随着高度的增加,大气透射率不断增强,结果进一步获得的能量增加。另一方面,消耗的能量由飞机的姿态、 空气动力特性和空气密度决定。消耗的能量可以从飞机的规格来计算。此外,空气密度与飞机消耗的功率密切相关。当飞机在较高的高度飞行时,空气密度降低,舵面效率降低,降低了升力。
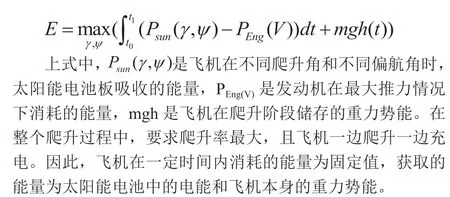
假设不考虑天气的影响,根据主动调节飞机的飞行姿态,使飞机在飞行过程中获得的能量最大化。因此,飞机的飞行路线是为了使飞机沿着太阳的航向飞行,以获得太阳能电池的最大电力水平,因此飞机的偏航率非常小,空气速度足够慢,飞机偏航所产生的阻力比较小。在这种情况下,为了节省能量,飞机的姿态可以只由俯仰和偏航来表示,实际上飞机可以由方向舵进行控制,而不考虑滚转。该问题可以表示为根据最大化能量的时间作为控制输入的俯仰和偏航的最佳控制,包括飞机具有的重力,飞机所具有的实时能量可以表示如下:

其中,P是根据俯仰角和偏航角的飞行器收集的能量,P是根据俯仰角的变化而飞行器消耗的能量。WZ 是根据俯仰角的变化引起的飞机的重力。t是初始时间,t是当前时间。这个目标函数考虑到由于飞机姿态引起的能量获取和消耗以及飞行高度所引起的引力。优化过程是最大化所获得的能量和消耗的能量之间的差异,并且还使重力势能最大化。
为了考虑续航时间,根据发动机数据分析,此太阳能无人机的正常巡航高度为5000m,最大飞行高度为15000m,将飞机的整个飞行过程分为爬升、平飞和下滑三个阶段,对每个阶段采用不同的控制策略,使飞机的剩余能量最大化。
3 有动力爬升段控制策略设计
太阳能无人机在飞行之前,电池中的电量为满电状态,因此在飞机刚开始爬升过程中,这个阶段着重于考虑飞机能够爬升到足够高的高度,在白天可以一边充电一边爬升,使飞机可以储存更多的重力势能和电能,以便于飞机在夜晚不使用剩余电能的情况下,利用其本身重力势能,飞行更长的时间。因此,在白天爬升飞行时,需要保证飞机保持最大的爬升率。
只要太阳辐射能量可用于维持动力飞行,无人机就会爬上来获得潜在的能量。为了简单起见,产生平滑的轨迹,时间范围被描述为Δt 的n 个间隔,爬升速率是恒定的。换句话说,在所有时间间隔 Δt 处的垂直位移都相同并且等于Δz,其指定爬升速率为:
因此,最大高度由下式给出:

飞机运动学方程和动力学方程分别为:
在这个过程中,发动机给最大推力,影响飞机能量的因素为:爬升角、偏航角和飞行速度。因此,建立爬升段能量函数如下:
因此,根据爬升段设计要求,分别设计纵向和横向控制模态。纵向为定俯仰角爬升,使飞机能够在夜晚来临之前,飞机能爬升的高度最高;横航向为偏航角保持,无人机继续沿着太阳光线的偏航角飞行,保证传感器的最大入射角,无人机一边进行充电,一边爬升。
根据爬升段飞机动力学方程,太阳能无人机在向上爬升的过程中,随着高度的不断增加,空气密度减小,飞机最大推力也不断减小,为了维持正常飞行克服飞行阻力,飞机剩余推力不断减小,导致爬升率变慢。根据飞机气动数据,在配平的基础上,不同的迎角下,计算出飞机的爬升角和爬升空速,此时发动机为最大推力。最后得出不同高度下飞机最大爬升率,如图1 所示。
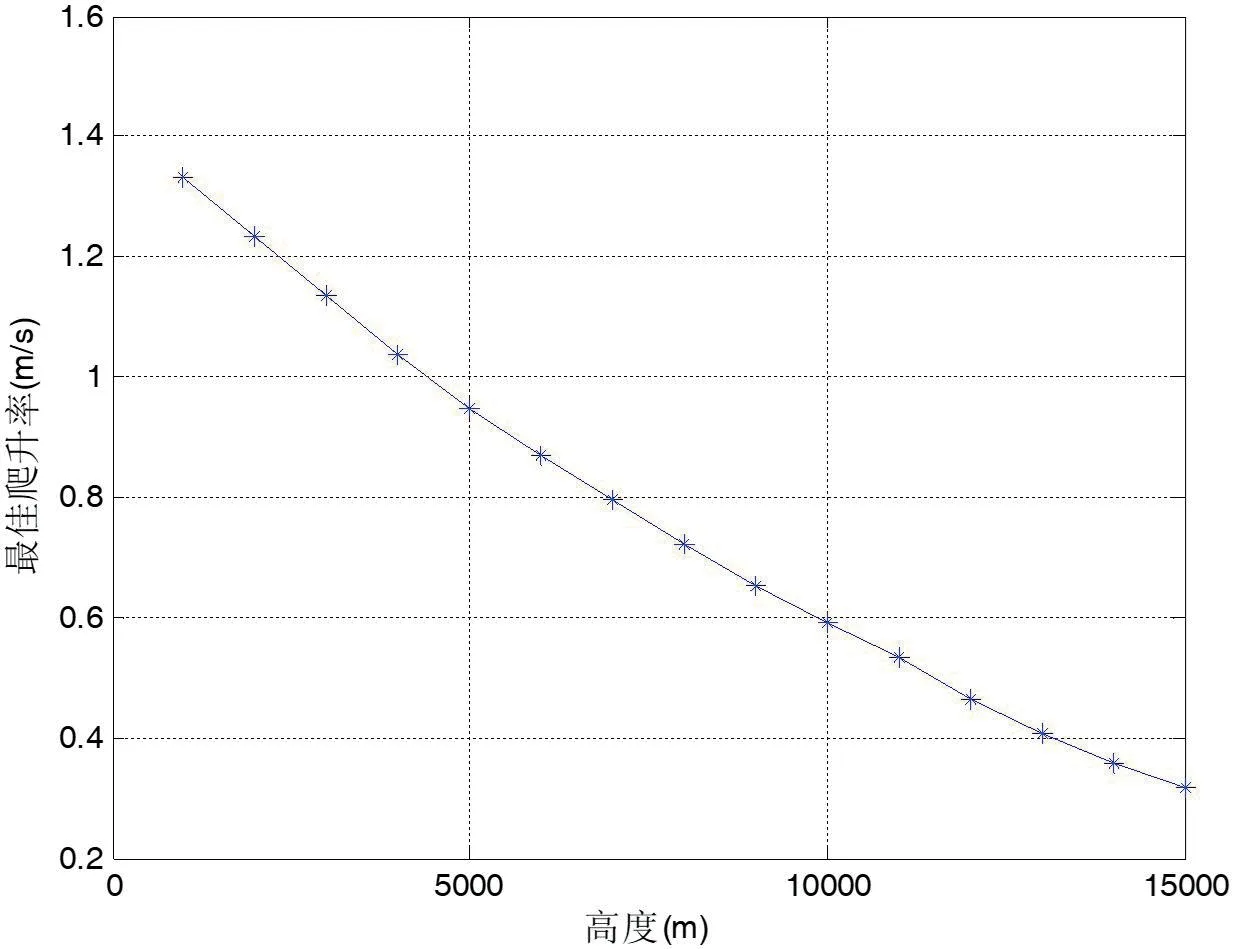
图1:不同高度下飞机最佳爬升率
4 有动力水平段控制策略设计
在太阳能平飞段,这个过程主要是给太阳能电池板充电,使飞机的能量系统存储更多的能量,因此,在平飞长航时飞行,主要目标是在保持永久飞行的同时保持最大的传感器覆盖范围,使飞机本身吸收的能量最大化,同时减少平飞段电池能量的消耗,主要考虑发动机能量的使用。这个过程中,主要是基于太阳的位置、太阳能无人机的姿态和天空的清晰度产生太阳能。
因此,在无人机平飞段飞机的限定条件为:太阳能无人机在飞行过程中吸收的能量(P)最大,发动机消耗的能量(P)最少,即太阳能无人机电池板与太阳光维持最大入射角,并且要求飞行阻力最小,发动机为保持定常平飞的最小推力。
当飞机定常平飞时,dV/dt=0,dγ/dt=0,其相应的运动学方程和动力学方程分别为:
在飞机平飞过程中,飞行高度保持不变,则航迹角保持不变,主要考虑飞机本身对能量的获取,能量的吸收主要是通过改变飞机的速度和偏航角,飞行速度影响能量的吸收和消耗,偏航角影响太阳光的吸收率。通过改变飞机的飞行速度,使发动机消耗的能量降到最少,因此建立的能量函数为:
根据水平飞行段的设计要求,分别设计横向和纵向的控制器。控制器结构为:纵向为高度保持飞机水平飞行,发动机通道为速度闭环控制,以保证飞机最小推力的速度平飞,消耗的能量最少;横航向为偏航角保持,使飞机沿着太阳光线偏航,保证传感器最大入射角,吸收的能量最多。
在配平状态下,根据飞机气动数据,计算在不同高度下,飞机在最小推力下定常平飞时的最佳飞行速度。如图2 所示。
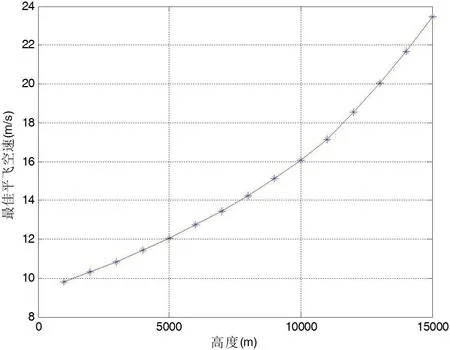
图2:不同高度下最佳平飞速度变化曲线
高度越高,高空空气密度越小,为了维持飞机所需升力,发动机需要提供较大的推力增加飞行速度。因此可以根据不同的飞行高度,选择适合这一高度下的飞行速度,高度越高,飞行速度越大。根据不同高度下的最佳飞行速度,计算得出最佳迎角约为α=0°,通过控制俯仰角,使飞机按最佳迎角飞行,一定的时间内,P最小,可以保证E(t)的值最大,符合平飞段设计要求。
5 无动力下滑段控制策略设计
当太阳能无人机进入夜间飞行时,这时候飞机的能量为电池中的剩余电能和重力势能。首先考虑利用自身的重力势能,飞机进行无动力滑翔阶段,当高度达到正常巡航高度时,在利用电池中的剩余电能。这个阶段要求飞机巡航时间长,高度损失最少,尽可能的度过夜晚。
在给定的能量条件下,持续飞行需要改变飞机姿态,以减少飞行中消耗的能量。如果飞机的飞行高度增加,飞机可以获得可用的潜在能量降低高度飞行而没有电力消耗。对于白天来说,所获得的太阳能用于正常飞行,剩余能量被保存到电池中,直到电池充满电为止。在完全充电的状态下,剩余能量不能再被电化学储存,但是如果使用这种剩余能量来增加飞行高度,则重力势能可能会增加。所提出的方法使用太阳辐射的剩余能量达到较高的高度,然后在下降飞行中使用获得的高度,而不消耗额外的功率。
在夜晚滑翔阶段,太阳能无人机在夜间无法再吸收能量(P=0),电池正在放电,整个过程只有能量的消耗,无人机需要使用其潜在的能量和电池内部存储才能在夜间滑行。建立能量目标函数为:

t为刚开始下滑的时间,t为当前的时间。此时飞机运动学方程和动力学方程与爬升段相同,不同的是发动机推力为0。
根据滑翔段设计要求,设计纵向和横向控制器结构为:纵向为迎角保持控制模态,使飞机以最低下滑率时的迎角滑翔,这时飞行效果最好,飞行最有利,高度损失的最少;由于飞机的偏航速率比较低,对能量的消耗几乎很小,所以横航向控制与白天平飞段和爬升段一致,以保证在第二天白天时能够继续沿着太阳光的航线。
根据其动力学方程分析,在不同迎角下,分别计算飞机下滑率和下滑空速,最后得出每个高度下,飞机的最佳下滑率,如图3 所示。
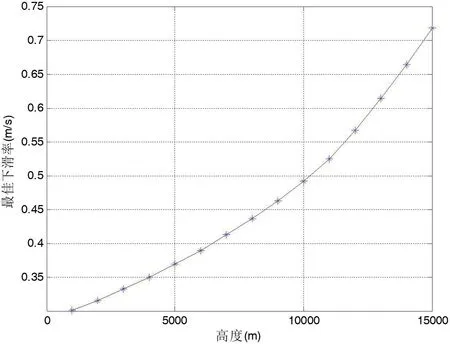
图3:不同高度下飞机最佳下滑率
图中可以看出,随着高度的上升,空气密度减小,飞机需要足够的动压维持升力,空速不断变大,导致飞机下滑的很快。通过计算,此时最佳迎角在4°左右,飞机处于最大升阻比状态飞行,下滑角约为γ=2.089°,通过控制俯仰角使飞机达到最佳滑翔状态,这个时候飞行最有利,效率最高,飞机一定时间内无动力滑翔损失的高度最少,即mgh(t)最大,可以保证E(t)最大,符合无动力滑翔设计要求,根据不同高度下飞机最佳下滑率,计算得出,飞机从15000m 下滑到正常巡航高度5000m,大约需要5.67 个小时。同样的高度下,下滑的时间大于爬升的时间,使飞机晚上可以节省一部分能量,安全的度过夜晚。
这个过程中,太阳能电池中剩余的电能是固定的,重力势能随着时间的增大而减小,当高度到达正常巡航高度时,再利用剩余电能进行平飞,此时平飞段的控制与白天平飞段控制逻辑相同。
6 飞行航线设计
根据上述分析结果,设计飞机整个飞行过程的飞行航线,模拟飞机真实飞行48 小时,假设光照时间与夜晚时间相同,各为12 个小时,飞机正常巡航高度为5000m。根据三个飞行阶段的设计要求,对整个过程进行航迹设计。
(1)设定初始状态为:飞机处于正常巡航高度从早上6 点开始平飞,飞机航向始终与太阳光航向对准,保证最大入射角。飞行速度为最佳平飞速度,此时发动机最省力,消耗的能量最少。在平飞阶段,飞机可以执行巡航任务。
(2)到中午12 点,假设太阳能无人机充满电,此时飞机开始爬升,发动机为每个高度下的最大推力,爬升率最大。当爬升到最大飞行高度15000m 时,飞机在最大高度保持平飞。
(3)到下午6 点无太阳光照的情况下,飞机开始利用重力势能滑翔飞行,此时飞机保持最佳下滑迎角,飞行速度为每个高度下的最佳下滑速度,下滑率最小,当飞行高度滑翔到正常巡航高度时,飞机由下滑转平飞,这时飞机开始使用剩余电能。
(4)飞机利用剩余平飞至第二天早上6 点时,与前一天飞行过程相同,飞机继续平飞开始充电,整个过程不断循环,实现太阳能无人机不间断飞行。整个飞行过程如图4 所示。
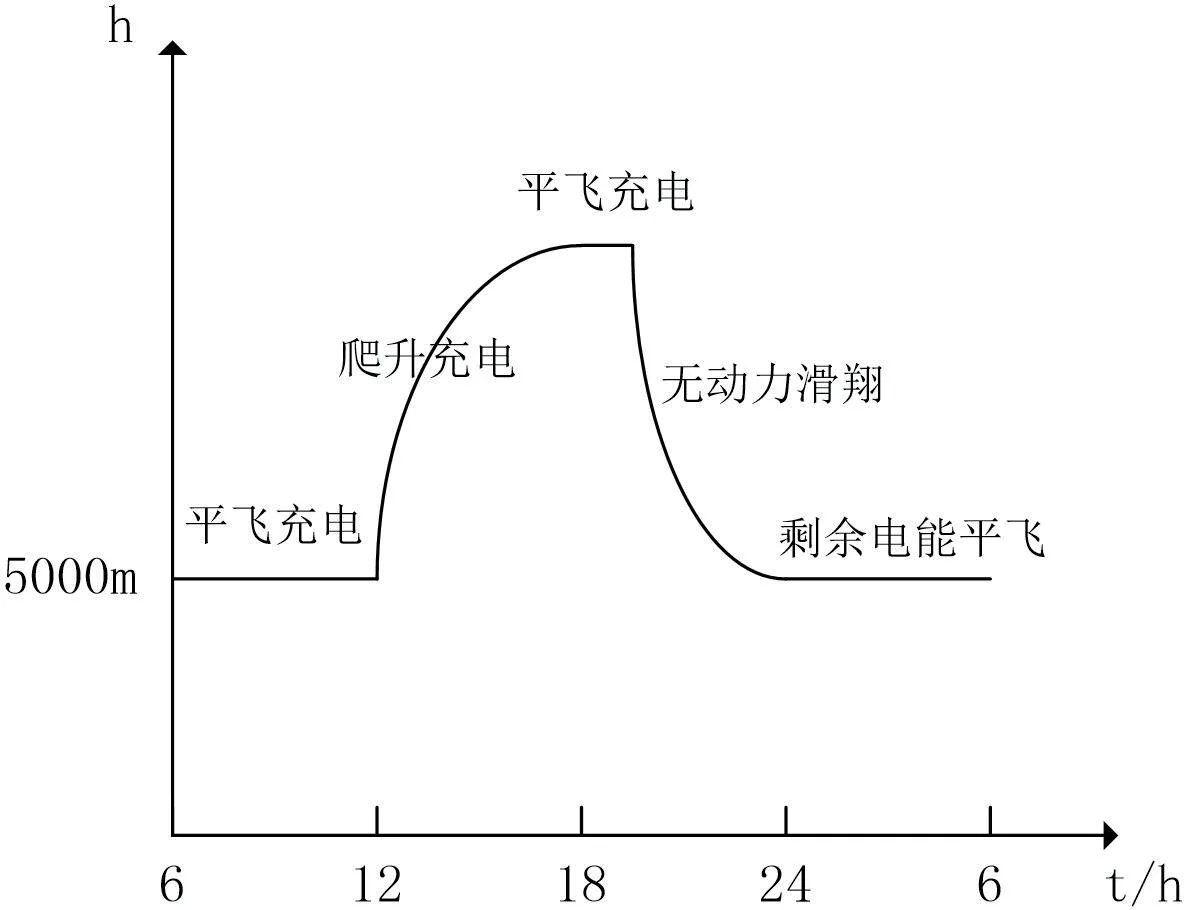
图4:纵向飞行剖面图
飞机纵向飞行高度如图4 中所示,同样的高度,下滑时间大于爬升时间,符合无动力滑翔设计要求。横航向始终对准太阳光航向,保证太阳能电池的最大吸收率,即飞行24个小时飞机刚好转一圈,整个过程不断循环,飞机的航迹为不断地盘旋飞行。
整个过程中,飞机的俯仰和偏航被优化以最大化要收获的能量的量。偏航控制飞机始终与太阳对准。特别地,作为控制输入,俯仰更为重要,因为它允许通过控制高度来使用重力。在夜晚飞行时使用重力的飞行路线的主要优点是在太阳能不能再被捕获后,通过日落之后的非动力滑翔对电池的依赖性降低。即使电池完全充电,它们只能在所有重力势能消耗之后被使用,因为它是从剩余能量转换的,因为电池比作为能量存储元件的重力势能更有效。换句话说,将剩余能量转换为重力势能的推进部分的效率比电池低。
电池的储能效率高于重力势能,但应考虑由电池重量引起的消耗功率的增加。 将太阳能转化为重力的效率随着高度的增加而降低,这是空气密度下降的结果。 实际上,重力势能不能转化为推进能。正是在航空器通过消耗潜在能量进行非动力滑翔的同时,可以节省所需的飞行能量,因此无动力滑翔时间和节约能源可以被认为是潜在能量转化为推进力的转换效率能源。
7 仿真结果分析
在已建好的太阳能无人机模型与控制律的基础上对太阳能无人机进行了全状态闭环仿真,并进行了全航迹的设计,使太阳能无人机按照预先设定的航线飞行。设定初始高度为5000m,模拟真实48 个小时的飞行,利用Simulink 中State flow 模块,完成整个飞行航迹逻辑设计,图5 为航迹设计状态流程图。
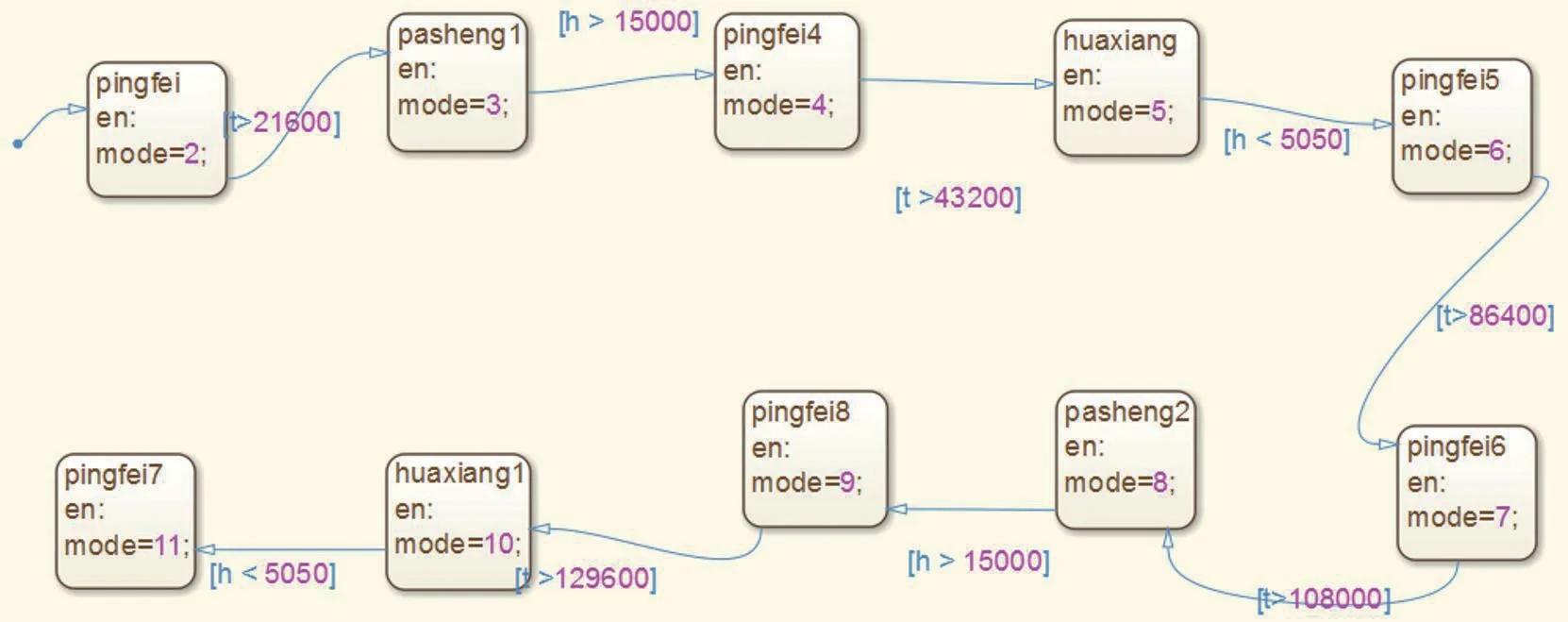
图5:太阳能无人机飞行状态流程图
整个飞行过程三维仿真曲线以及纵向高度曲线如图6、图7 所示。
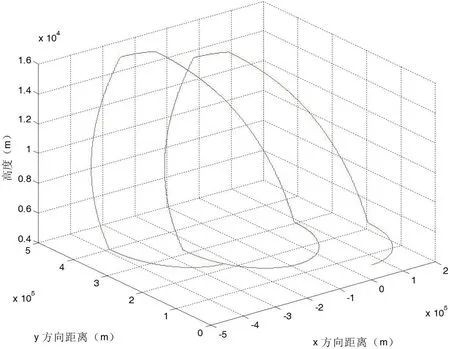
图6:太阳能无人机X、Y、Z 三维曲线图
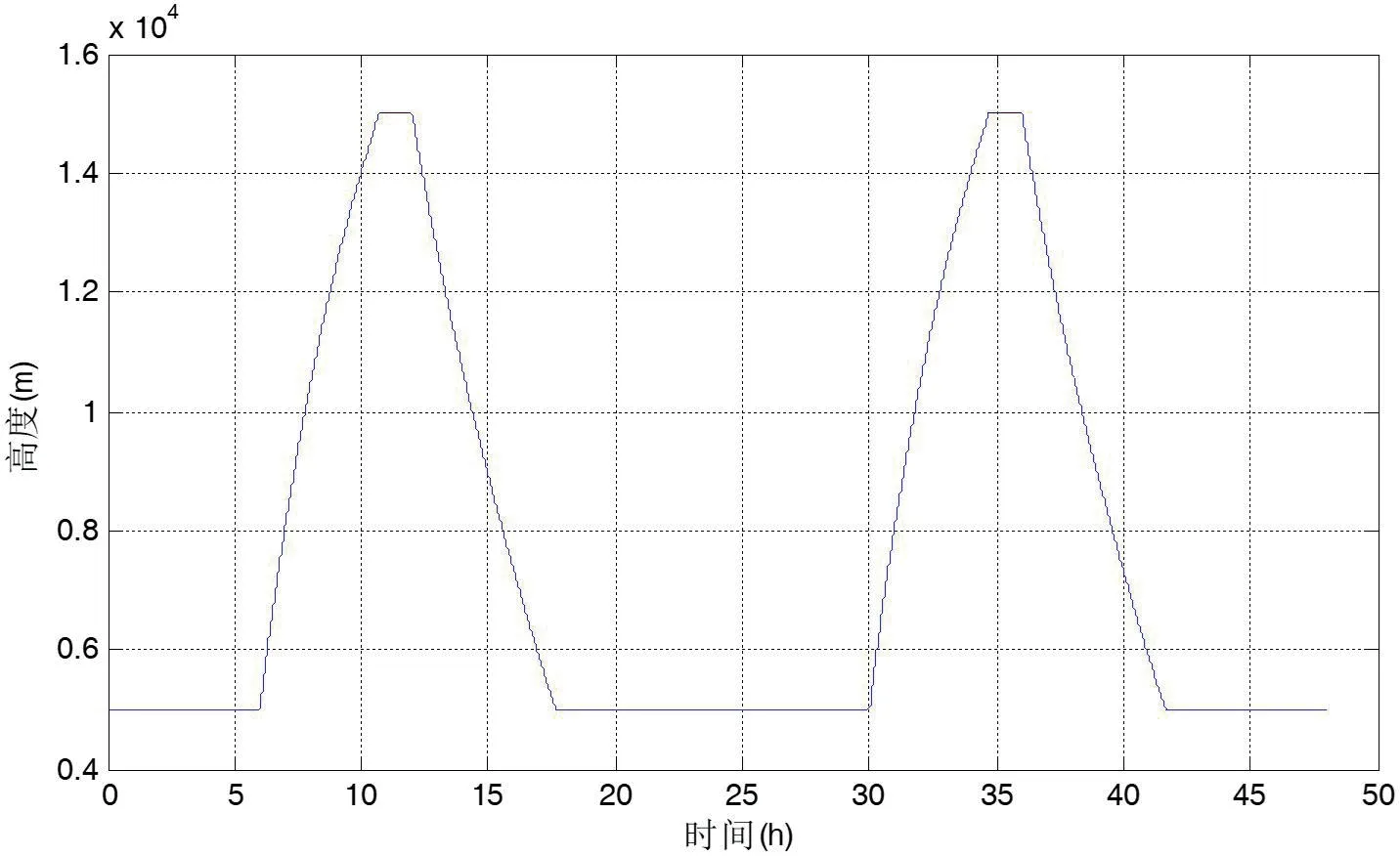
图7:太阳能无人机高度变化曲线
在Simulink 环境下,模拟了飞机48 小时的飞行,图中可以看出,飞机的飞行轨迹为盘旋飞行,一昼夜时间内,飞机平飞时间大约为13.64h,爬升时间为4.69h,下滑时间5.67h,爬升时间小于下滑时间,满足航迹设计要求。
猜你喜欢
昆钢科技(2022年4期)2022-12-30
军民两用技术与产品(2021年7期)2021-10-13
昆钢科技(2021年6期)2021-03-09
北京航空航天大学学报(2020年3期)2021-01-14
小学科学(学生版)(2019年4期)2019-05-11
课程教育研究(2018年14期)2018-06-07
小学时代(2017年16期)2017-06-19
百科探秘·航空航天(2015年10期)2015-11-07
