实景三维DEM生产关键技术及质量检查方法
2022-07-12 13:54王伟丽穆利娜
测绘标准化 2022年2期
王伟丽 穆利娜 任 峻
(1.自然资源部第一航测遥感院 陕西西安 710054;2.自然资源部测绘标准化研究所 陕西西安 710054)
实景三维作为真实、立体、时序化反映人类生产、生活和生态空间的时空信息,是国家重要的新型基础设施,通过“人机兼容、物联感知、泛在服务”实现数字空间与现实空间的实时关联互通,为数字中国提供统一的空间定位框架和分析基础,是数字政府、数字经济重要的战略性数据资源和生产要素。
地形级实景三维场景主要表现城乡大区域地形地貌,从高空视角观看,能够直观展现山川河流、村镇分布和城市形态。地形级产品由数字高程模型(DEM)/数字表面模型(DSM)与数字正射影像(DOM)/真正射影像(TDOM)及地理实体融合实时感知数据构成。 其中,DEM描述的是地面高程信息; DSM是指地表的高程信息; DOM是具有地图几何精度和影像特征的图像集;TDOM是消除了建筑的投影误差,只能看到建筑物的顶部,不会发生建筑物之间的遮盖的正射影像;地理实体融合实时感知数据是指现实世界中占据一定且连续空间位置和范围、单独具有同一属性或完整功能的地理对象,为实现某种统一功能或达到某种管理目的而形成的地理实体数据集合。
DEM生产的数据源有地形图、光学影像、合成孔径雷达数据和激光雷达点云数据等,卫星遥感影像匹配生成DSM数据是目前获取DEM数据的一个主要手段,具有成本低、现势性高和覆盖面大的特点。
实景三维DEM的生产流程:以卫星遥感影像作为数据源,基于区域网平差后的立体卫星影像,首先,利用影像处理系统的密集点云匹配技术,得到初始DSM匹配数据[1];其次,采用自动和人机交互相结合的方式,在二维和三维编辑环境中进行编辑处理,对植被及建筑物等人工构筑物进行滤波降低高程和编辑处理,得到地面高程数据模型;最后,经数据镶嵌、裁切处理,形成图幅DEM成果。其中,影像匹配和DEM的编辑处理是生产高精度DEM的关键。
1 影像匹配技术
影像匹配是通过一定的匹配算法在多景影像重叠区识别同名点的过程,即利用互相关函数,评价重叠区域多个影像的相似性以确定同名点。首先提取以待定点为中心的小区域中的影像信号,然后提取另一影像中相应区域的影像信号,计算二者的相关函数,最后以相关函数最大值对应的相应区域中心点为同名点。同名点的确定是以匹配测度为基础的,基于不同的理论或不同的思想可以定义各种不同的匹配测度,因而形成了各种影像匹配方法及相应的实现算法。常见的基于像方灰度的影像匹配算法有相关函数法、相关系数法及最小二乘法等,基于像方特征的影像匹配算法有跨接法影像匹配、金字塔多级影像匹配等。
目前,PixelGrid、CIPS、INPHO软件是批量生产DSM的比较成熟的影像处理系统,均可通过数码影像、卫星遥感影像或者传统光学扫描影像,在少量人工干预下,经过一系列的自动化处理,输出包括DSM、DEM、DOM和TDOM等成果,并能生成一系列其他中间产品。不同影像处理系统的匹配算法不同,导致匹配结果也不同,另外,生产区域地貌类型及特征千差万别,不同影像处理系统对不同地貌类型的匹配效果也不同。因此,在实际生产中需要结合项目的具体要求,从匹配结果的地貌细节表现力、晕渲表达等方面,对各类影像处理系统的匹配结果进行综合分析,根据综合分析结果确定某个软件的匹配结果用于生产数据,其余软件匹配结果作为替补数据,从而减少人工编辑的工作量。
本文以实景三维DEM数据生产为例,对利用PixelGrid、CIPS、INPHO软件匹配不同地貌影像数据的结果进行分析。图1为利用PixelGrid、CIPS、INPHO软件进行山地地形DSM匹配的效果。

图1 不同软件山地匹配效果
从图1可以看出,不同软件匹配结果存在差异,在山地区域,PixelGrid匹配数据噪声点多,晕渲粗糙、不光滑;CIPS匹配数据噪声点较多,晕渲粗糙、不光滑,缓坡区域存在台阶状晕渲;INPHO的匹配数据噪声点相对较少,晕渲比较光滑,但平缓区域存在格网、锯齿状晕渲,对个别破碎地貌容易损失地貌形态。图2为利用PixelGrid、CIPS、INPHO软件进行水域匹配的效果。

图2 不同软件水域匹配效果
从图2可以看出,对于水域的匹配,PixelGrid的匹配数据大粗差点较多,水域内晕渲呈现凹凸不平现象;CIPS的匹配数据小粗差点较多,晕渲粗糙、不光滑;INPHO的匹配数据存在大粗差点,但晕渲比较光滑。总之,3种软件对水域的匹配效果都不理想。图3为利用PixelGrid、CIPS、INPHO软件进行重叠区域存在云雪的影像匹配的效果。
从图3可以看出,存在云雪的影像,由于影像纹理较弱,PixelGrid、INPHO和CIPS软件的匹配效果都不理想, 因此在实际生产中应尽量采用重叠区域内无云雪影像的匹配结果。如果没有替换的云雪影像,可使用3种软件的匹配结果相互替补。例如,同一区域内3种软件匹配数据都有大粗差点但位置不同,可以用匹配效果相对较好的软件的匹配结果作为底图数据,另外两种软件的匹配数据作为替补数据,如果没有替换数据的小范围区域则需要人工修补,这样就可以得到较好的效果。如果影像中云雪范围较大,则可以使用现势性相对较弱的DEM数据作为替补。PixelGrid、CIPS、INPHO软件对不同地貌匹配效果对比见表1。

图3 不同软件云雪区域匹配效果

表1 各软件匹配效果对比Tab.1 Contrast with Different Softwares in Matching Effect软 件平地、丘陵地山地、高山地PixelGrid 整体符合立体,噪声点多,人工编辑量大 与立体套合,较宽山脊、山顶匹配到位,窄脊有削地形的现象,微小地貌表达较好;部分沟谷存在不连续CIPS 整体符合立体,噪声点较多,人工编辑量大,部分平地、缓坡区域存在台阶状晕渲 与立体套合,较宽山脊、山顶匹配到位,窄脊和微小地貌表达较好;部分沟谷存在不连续,较缓山坡易出现台阶晕渲 INPHO 整体符合立体,噪声点较少,人工编辑量少,部分平地区域存在格网、锯齿状晕渲 与立体套合,沟谷区域匹配精度、晕渲效果较好,山脊、山顶表达正确;个别微小地貌表达不到位
根据实际生产经验,在匹配效率方面,PixelGrid的匹配效率低,单景匹配通常需要12.5 h;CIPS自动化程度较高,单景匹配通常需要8.5 h;INPHO在影像匹配时是人工操作批处理,有时还需要人工干预,单景匹配通常需要9.2 h。在匹配结果方面,3种软件的匹配结果均能反映地表形态。因此,在综合考虑成果质量及生产效率情况下,生产高精度DEM还需要根据实际项目的地形情况来确定使用哪种软件。
1) IOI 2) stack [stæk] n. 3) pretend [prɪ'tend] v.电影中的反派公司的名称 堆叠 假装
对于平地、丘陵地,宜采用CIPS软件的匹配结果作为底图数据,能更好地表达出地形的细节;对于山地、高山地,宜使用INPHO的匹配结果作为底图数据,破碎地貌区域可以使用CIPS的匹配结果作为替补数据。
2 人工交互编辑
DEM人工交互编辑包括二维编辑和三维编辑。二维编辑主要是对地貌晕渲异常情况进行处理;三维编辑是基于立体模型,人工目视查看DEM格网点是否符合地貌形态,对立体不符合区域进行编辑处理,其中,冲沟地貌、沙漠地貌、植被覆盖区域和阴影区域等是编辑难点。
2.1 冲沟地貌
冲沟地貌地形通常都较为破碎,微小冲沟较多。冲沟地貌编辑以体现地貌形态特点为目的,对长度小于30 m的冲沟,不需要表示,进行综合取舍。如果沟脊形态较为凌乱,可先进行轻度平滑处理,再进行降低高程处理,同时要兼顾晕渲显示效果。冲沟地貌编辑前后效果如图4所示。

图4 冲沟地貌的表达
2.2 沙漠地貌
沙漠区域影像纹理特征不明显,属于弱纹理区域,匹配效果较差。通过对匹配影像进行增强处理,可以改善匹配效果。沙漠地貌编辑时,首先判断整个地貌的走势,判断出主要的地貌形态和主要的沟脊走向,然后遵循“由整体到局部,由粗到细”的原则进行编辑,避免出现系统性偏差。沙漠地貌编辑前后效果如图5所示。

图5 沙丘地貌的表达
2.3 植被覆盖区域
植被覆盖区域DEM编辑的难点是对植被覆盖区地貌形态的判断,需要根据边缘裸露地表和植被缝隙的可见地表,判断植被覆盖区地貌形态。对于植被覆盖区域间杂有裸露地表的,需要注意植被降低高程处理后与裸露区域的地形自然协调;对于植被浓密完全覆盖区域,地形判断要符合区域地貌特征,还需要判断出是尖锐深沟还是圆滑浅沟,是有起伏还是平地,避免植被覆盖区地形表达的异常。植被覆盖区域编辑前后效果如图6所示。
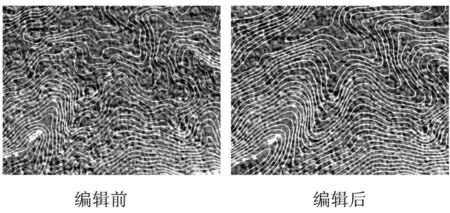
图6 植被覆盖区域的地形表达
2.4 阴影区域
阴影区域影像纹理特征通常较弱,影像匹配结果中出现大错的几率较高。人工交互编辑时,应注意替补使用同一区域不同影像的匹配结果。由于角度及光照的影响,不同影像阴影覆盖区域范围不同,同一区域不同影像匹配结果的替补使用,可以最大化减少人工编辑工作量。
另外,阴影区域编辑时,还可通过对阴影区域影像色调的调整来增加对地形特征的辨识度,使编辑结果更符合实际地形。阴影区域编辑前后效果如图7所示。

图7 阴影区域的表达
2.5 地形突变区域
地形突变区域通常位于坡脚、陡崖和陡坎处,受匹配成果格网间隔的制约,地形突变处的匹配结果很难准确体现出突变处的地貌形态,即使采用滤波及降低高程等处理也不易准确表达地形突变处的地形。对于地形突变处通常采用特征线构TIN的方式进行编辑。从编辑后的曲线的形态上看,坡脚、陡崖和陡坎处曲线比较密集,与地形地貌贴合较好,反之地形突变处曲线稀疏的地方与地貌不符。地形突变区域编辑前后效果如图8所示。
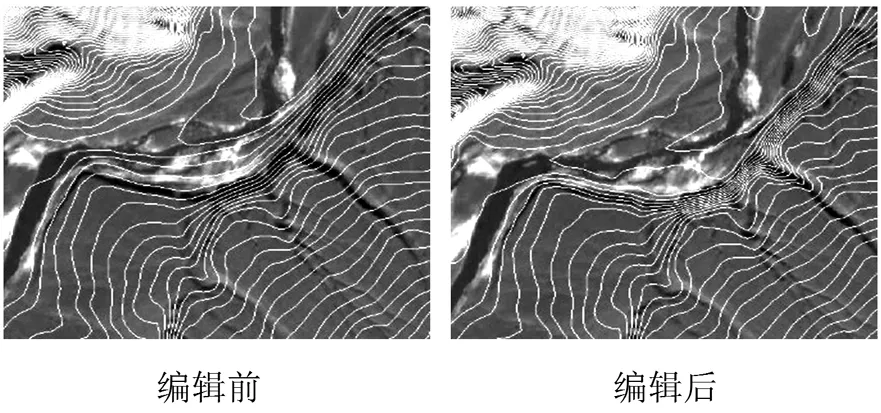
图8 地形突变区域的表达
3 DEM质量检查方法
实景三维DEM质量检查内容包括DEM起止点坐标及范围、DEM数据格网尺寸、数据文件存储格式和数据结构、相邻图幅之间接边、投影信息参数和所使用影像的时相及质量等。实景三维DEM数据检查方法通常包括人工检查和程序检查。人工检查分为二维晕渲检查和三维立体检查。二维晕渲检查主要是检查是否有与实际地貌不符的台阶、硬棱、粗差和跳点等,不能出现地貌突变和异常,以满足可视化展示的需要。程序检查通常是对格网坐标、数据组织格式、图幅间接边、水域置平和元数据的内容及格式进行检查。
3.1 二维晕渲检查
DEM晕渲图的过程检查是采用PhotoMaper软件,通过设置放大比例,再使用DEM动态晕渲功能浏览DEM晕渲图,能更直观地发现DEM数据中存在的台阶、粗差和硬棱等问题,同时还要结合DOM来判断这些问题是否为晕渲异常现象。
实际生产中,通常是利用ArcMap软件对DEM成果进行检查验收。利用ArcMap软件的影像分析功能生成DEM晕渲图,逐屏浏览晕渲图,检查是否存在台阶、粗差和硬棱等问题。ArcMap中的晕渲显示效果相当于PhotoMaper软件中放大2倍比例的效果。因此在生产中作业人员在PhotoMaper软件检查DEM晕渲图时,要在放大2倍比例的状态下进行。两种软件的晕渲效果见图9。
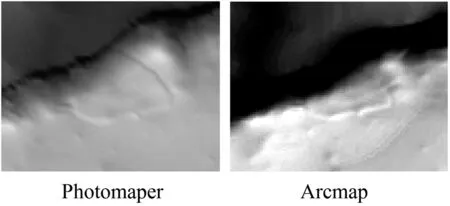
图9 两种软件的晕渲效果
3.2 三维立体检查
利用PhotoMaper软件,在立体环境下,利用DEM等视差曲线及格网点显示,在立体模型上进行套合检查[3]。在进行套合检查时,如果以一种等视差曲线的间距进行检查就很难发现平坦区域存在的问题。根据不同地形类别设定等视差曲线的间距,平地、丘陵地通常设置为2 m,山地设置为5 m,高山地设置为10 m[3]。对于山地、高山地图幅内的平坦区域,需要将等视差曲线的间距改为2 m 进行立体套合检查;对于丘陵地图幅内的陡峭山地,则需要将等视差曲线的间距改为5 m进行检查,避免出现视差曲线的间距过小影响对地形判读的准确性。
对于存在影像纹理差异的区域,在立体检查过程中需调节影像亮度,对不同纹理区域分别调整影像亮度,得到适合立体检查的各个不同纹理区域的影像亮度,以便准确判读各种地貌细节特征。
逐屏检查等高线及格网点与立体模型的贴合状态时,将等高线与格网点的显示设置为快捷键,便于切换等高线与格网点显示,能更直观地检查建筑物、桥梁、植被等非地面区域的DEM高程点是否与地面高程一致,山脊、沟谷处DEM高程点是否与地貌形态表现得一致。
对于水域检查,首先,在立体模式下检查水域范围采集的正确性;其次,利用DEM晕渲叠加等视差曲线及水域范围,检查静止水域内DEM高程是否合理,不允许出现水域高程高于岸边高程的情况,同时水域高程也不能过低;最后,检查流动水域宽度大于50 m的是否是自上而下平缓过渡表示[4]。
3.3 程序检查
利用检查软件对DEM数据的格网坐标、数据组织、图幅接边、水域置平及元数据进行检查。首先根据比例尺、图幅外扩范围设置各检查项的环境参数,再进行各项检查。 需要注意,对水域的检查结果还需要导入图幅内进行立体排查,如果出现水比岸高的点,可能是岸边存在错误的低点,修改低点处高程至地面高程即可。
4 结 语
本文从实景三维中国建设项目DEM生产需求出发,通过对PixelGrid、CIPS、INPHO 3种软件匹配DSM数据的效果进行对比,分析了不同软件匹配DSM数据各自的优劣势,提出优势互补的利用方案。DEM人工编辑是制作DEM的难点,从作业难点、困难区域、不同地形地貌等方面对DEM生产过程中出现的主要问题进行了分析,给出合理的解决方法。为了保证产品质量,从二维晕渲、三维立体和程序三方面进行质量检查,以有效控制DEM成果质量。随着DEM的广泛应用,对DEM的质量要求也会越来越高,生产中需要不断探索新方法,以适应发展需要。
猜你喜欢
发明与创新·小学生(2021年3期)2021-03-25
孩子(2019年9期)2019-11-07
创新作文(1-2年级)(2017年12期)2018-04-17
小学生时代·大嘴英语(2017年1期)2017-03-20
北京教育·普教版(2017年1期)2017-02-05
爆笑show(2015年9期)2015-10-24
CHIP新电脑(2015年10期)2015-10-15
微型计算机(2009年23期)2009-06-01
小朋友·快乐手工(2009年4期)2009-04-28
数学大王·中高年级(2009年3期)2009-04-21