基于元胞自动机的人车交互行为数值模拟方法研究
2022-07-22 06:07王儒豪赵瑞峰
四川大学学报(自然科学版) 2022年4期
翟 越,王儒豪,屈 璐,薄 杰,赵瑞峰,杜 菁
(长安大学地质工程与测绘学院,西安 710054)
1 引 言
世界卫生组织2018年《全球道路安全现状报告》中指出,每年有135万人死于道路交通安全事故,其中有23%为行人在通过道路时发生,交通安全问题依然严峻.目前,国内外大量学者针对混流交通模拟进行了深入研究,按照模型原理的不同,主要可以分为社会力模型、Agent模型和元胞自动机模型等.Helbing等[1]首先将社会力模型应用于行人的仿真,随后众多研究者从各种角度完善、优化该模型.Charitha 等[2]以社会力为基础建立微观模型,模拟不同人车交互场景下的机动车与行人互动过程.Agent模型可以使模拟中的行人或车辆进行动态交互和自我调节,常用于个体行为上的改进[3].元胞自动机模型最早由Von Neumann提出[4].研究人员多利用元胞自动机对人或车进行单独疏散模拟[5-12].上述研究中,社会力模型更强调连续变化的重要性,适合观察模拟宏观现象与规律,侧重于整体交通流的路径选择与流量分布,对车与车、人与人之间的微观个体交互行为模拟不足;Agent模型更强调个体独立行为,在模拟整体现象的宏观规律方面不足;元胞自动机模型原理简单、算法规律灵活,能够模拟复杂交通现象,不仅能够在从微观角度观察元胞的状态变化得出任意时刻各元胞具体参数,得出模拟场景中的微观特性,同时也能得出平均速度、平均流量、密度和时间等重要参数,适合于研究从微观个体交互行为对整体人车运动的影响.然而,现有研究中对商业地下停车场这类具有复杂人车混行场景下,微观人车交互行为对宏观人车疏散安全的影响研究较为少见.
本文以典型商业地下停车场为背景,针对流量随时间波动较大、人车行为随机性较强、对环境熟悉度较低等场景特点,将人车分别看作有独立运动判断规则且相互作用的个体,从动态人车交互模拟入手,充分考虑了行人绕行不同运动状态下的车辆、车辆判断行人过道行为并做出运动状态调整、车辆与停车位的停启交互对行进中的行人与车辆的减速效应等因素,建立符合人车实际行为的模拟模型.该模型能够真实模拟复杂人车交互场景下实际人车行为与宏观人车疏散的耦合关系.在数日的实地观测与测量统计的基础上,利用元胞自动机模型仿真模拟行人与车辆的微观交互过程,以期建立更符合真实复杂场景下大量人车交互行为的数值模拟研究方法.
元胞自动机是一种时间、空间和状态都离散的网格动力学模型,每个元胞在每一时刻都有一种状态,这些状态可以表示该元胞上个体的状态和行为等[13].实地观测场景为商用地下停车场,从二维元胞自动机模型中选择建模用的动力学模型.目前,主流的二维元胞自动机模型邻域主要有Von Neumann型、Moore型和扩展的Moore型三种[14].由于Von Neumann型仅限于4个方向无法满足模拟要求,扩展的Moore型计算要求更高,适用于更复杂场景.针对本文的实际场景,选用Moore型邻域的元胞自动机进行场景建模.
本文的研究对象可分为行人移动模拟、机动车行驶模拟和人车交互模拟3个部分在模型的建立过程中要充分考虑三个部分的相互影响.
2.2.1 行人移动模型的建立
(1)行人移动方式.我们在模拟中将每个人占有的面积规定为0.5 m×0.5 m,即1个元胞大小.如图1所示,行人在每一时刻都将从周围的8个元胞中根据路径选择模型筛选出符合规则的1个作为移动目标,在下一时刻进行占有.

图1 Moore型元胞自动机中行人移动方式
(2)行人的路径选择模型.在模拟场景中,行人的移动可以看作已知目标情况下的移动,且由于商用地下停车场内停放的均为微小型车,行人的视线受阻情况较少,模型设置行人向着目标移动的路径遵循最短路径原则.
(3)行人绕行模型.行人在非车道行驶区域内行走时会碰到两种人车交互情形,并做出对应的反应如图2所示.

图2 非车道行驶区域内两种人车交互情形
2.2.2 车辆移动模型 本文设定商用地下停车场中的车辆以家用小型轿车为主,将模型中的车辆大小设为4.5 m×2.0 m,在模拟场景中的大小为9×4元胞.
(1)速度控制模型.我们通过实地观测发现,车辆在车道中的行驶速度一般在0~4.5 m/s之间.为了模拟车辆行驶时的速度变化,将车辆速度等分为0、1、2、3等4个等级,引入车辆的三个制动加速度等级,分别为0,4.5 m/s2,9 m/s2.在模拟中,车辆行驶时的速度每一时刻内都会更新,车辆在不同速度等级之间的切换需要通过车辆加速度来控制,即:
(1)

(2)运动模型.模型中的车道均为单向的单车道,车辆在行驶时不存在超车和换道行为,但会受到前方车辆和过道行人的影响.本文采用Kai Nagel等[15]基于Nasch模型改进下的巡航驾驶模型.
模拟过程中,车辆会分别针对拐弯或停车等因素造成的影响进行判别,我们分别设定更新后的车车交互速度v1、人车交互速度v2、车辆自身行驶需求改变的速度v3,并在三者中取最小值作为车辆在该时刻的最终速度vt,即:
vt=min(v1,v2,v3)
(2)
我们在确定车速后,用车辆所在位置加上改变后的车速就可以得到车辆移动后的位置,得到车辆在t时刻移动后的位置St,即:
St=St-1+vtt
(3)
式中,St-1为车辆在t-1时刻的位置(单位:m);St为车辆在t时刻移动后的位置(单位:m).
2.2.3 人车交互模型建立 人车交互模型主要模拟商用地下停车场行人过道时与车辆交互的过程,主要由单向车道内的车辆避让模型和行人过道模型组成.
(1)行人穿越模型.行人需要根据步行过道时间tp,绝对安全过道时间ts,慢跑过道时间tr,车辆到达行人位置时间tc做出是否通过的判断,设行人通过过道的概率为pi.
(4)
(2)车辆避让模型.当车辆驾驶员观察到车道边出现准备过道的行人时,会进行是否避让的判断.本文依据不同的人车距离对车辆避让行为进行划分,并构建车辆判断模型如图3所示.

图3 车辆判断距离
当行人位于判定距离外时人车无交互,判定距离如式(5)所示.
l判定=vc(tc反+tp)+l临界
(5)
车辆驾驶员会依据车道边最近的行人位置进行判断,判断规则如表1所示.

表1 模拟中判断距离规则
式(5)中,l判定为车辆与行人的避让判定距离(单位:m);vc为车速(单位:m/s);tc反为驾驶员自身反应时间,此处取1.36 s[16].tp为行人过道时间(单位:s);l临界为车辆与行人的临界安全距离,指车辆刹车停止后与行人的距离,取2 m.lp为车道宽度,本文中取4 m;vp1为行人最大的过道速度,即抢行时慢跑的速度为3 m/s;vp2为行人步行的过道速度,1.5 m/s[17].
3 场景建模
3.1 实测场景模拟
本文的实地观测场景确定为商用地下停车场的一个防火分区,大小为76.5 m×42 m,每隔两个车位设有柱网,柱子尺寸设置为0.5 m×0.5 m.东侧为唯一的车辆入口,西侧有BC两个车辆出口相隔12 m,车辆出入口宽均为4 m.场景内有三条东西走向单车道,三条车道长66.5 m,宽4 m.车道1与车道3对称分布于场景南北两侧,车道2处于场景中心轴处.南北两侧为对称的两个行人出入口D和E,宽为3 m,经实地观测得出车辆出口C相对于车辆出口B的车流量之比约为2∶1,车辆对车辆出口C具有明显的倾向性.模拟图如图4所示.

图4 地下停车场模拟图
由于商场在不同的时间段内人车流量差距较大.通过对不同时间段商用地下停车场人车流量进行实地调研,将人车流量高、中、低三种状态.对三种工况下的西安某商业地下停车场的运行情况进行现场调研,记录三种运行情况下的最大车流量统计停车位车辆占有情况和每辆车载人数量的比例.家用轿车载人上限为4人,因此每辆车的载人数量在1~4人之间,根据实际情况可以设置每辆车辆载人数量的比例,模拟场景内的行人均来自车辆搭载,高流量状态下以3人家庭式出行为主,低流量状态下以1人单独出行为主,这样可以实现人车流量同步增减,符合现实场景情况.以上三种流量情况下的统计数据构建模拟场景输入的初始数据如表2所示.
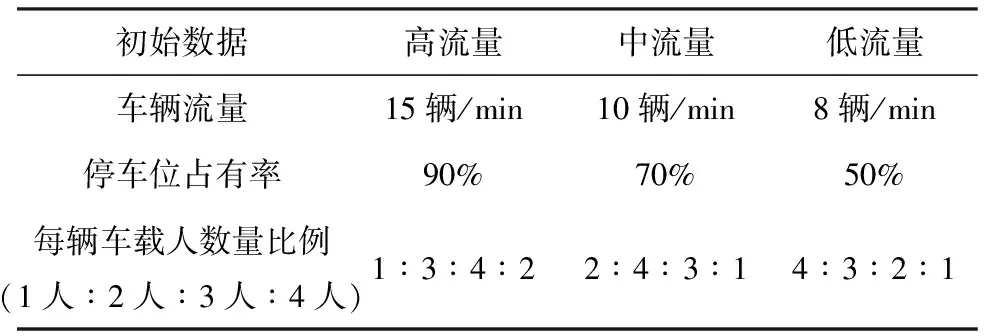
表2 模拟初始数据设定
仿真模拟长度设为1800个时间步,模拟对应现实的时间长度为10 min,模拟按照统计的车辆流量设计每个时间步内车辆进入场景的概率.
4 结果与分析
4.1 流量差异分析
在三种不同的流量状态下人车混行模拟情况如图5所示.

(a)低流量
上述模拟现象与实地观测现象一致,但从模拟情况中只能直观观察到人车在场景中交互行为,无法得到因人车交互行为而导致的具体延误时间,因此本文对模拟过程中的三条车道在不同工况下的人车延误损失进行了量化统计与分析.
4.2 车辆时空图分析
车辆时空图将车辆位置与模拟时间作为坐标轴,以车道2为例.在图6中可以直观得到三种流量状态下车辆每一时刻所处的位置,观测分析车道内车辆的运行轨迹.

(a)低流量
由图6可知,车道2的车流量随流量状态并非呈线性增长趋势,低流量状态下每100 s约有3辆车进入车道内,车辆间距较大,车道较为通畅;中流量状态下前300 s每100 s约有4辆车进入车道,车辆间距明显小于低流量状态时,且出现小范围拥堵情况.在300~400 s时由于流量增加,短时间内车道2集中涌入较多车辆,导致车道2发生暂时局部堵塞问题,新进入车辆观察到车道2的局部堵塞,因车道1和车道2距离最优选择出口C的空间距离相等,根据最短路径原则,新进入车辆会选择车道1作为备选项产生分流现象,导致车道2出现短时间的无新进入车辆现象.因此,在车辆时空图中会产生短时间的空白区域,400 s后车辆驶入密度明显降低至每100 s约3辆车;高流量状态时车道内车辆明显更加密集,且车辆间距较小,拥堵情况发生范围更大.当处于高流量情况下,车辆要遵守模拟场景内的基本原则,依然会优先选择能够到达出口C的车道1和车道2,进入车道1和车道2选择的判断时,车道1和车道2之间不存在最优解,因此会随机选择车道1和车道2进入,不会导致高流量状态下车道2的车辆时空图出现空白区域.
4.3 人车延误损失分析
延误损失是评价人车交互是否合理的一个重要指标.在模拟过程中可能会发生由于行人等待车辆驶过导致的行人延误和由于车辆等待行人过道导致的车辆延误,如图7所示.

(a)行人等待车辆同行 (b)车辆等待行人通行
在模拟场景中进行车辆延误分析时,只统计未与停车位交互、完整行驶过车道的车辆,并将正常通过的车辆与因外界因素导致延误的车辆分别统计.统计结果如图8所示.

图8 三种流量状态下车辆通过与延误数量
由图8可以看出,在低流量状态下选择车道2的车辆数目最多.随着流量增加,通过车道1的车辆数目增速更快,达到高流量状态时,通过车道1的车辆数目最多,通过车道2和3的车辆数目相近.为了对车辆的延误时间进行研究,对不同流量下三条车道内的车辆延误时间进行统计如图9所示,取其中车辆平均延误时间、最长延误时间进行分析.

图9 三种流量状态各车道车辆平均延误时间与最大延误时间
由延误时间图可以观察到随着流量增加,总体来说平均延误时间呈上升趋势.即从宏观角度来看,车辆的延误时间与人车流量成正比;同时通过观察模拟现象发现车道2内车辆与停车位交互的比例最高,平均延误时间与最大延误时间也为最长.我们针对该现象进行进一步分析,探讨影响车辆延误时间的微观因素.在高流量状态下,车道1通过车辆远大于车道2,但车道2的平均延误时间与车道1相差无几,可以认为车辆延误时间并非受人车流量单一因素影响,同时与车道内车辆与停车位交互行为有着不容忽视关系;又由最大延误时间图可以得出,高流量状态下车道2最大延误时间约为车道1的1.5倍,因此,由于车辆与停车位的大量交互导致在车道2延误时间更久的可能性较大.
在模拟场景中,行人穿越车道时会与车辆交互,若判定距离小于安全距离则会选择等待导致延误.通过对模拟过程中行人过道的等待时间和等待人数进行统计,分析人车交互过程并探讨行人延误时间的宏观趋势与微观影响因素.如图10所示为统计的三条车道过道中顺利通过行人和等待行人的数量.
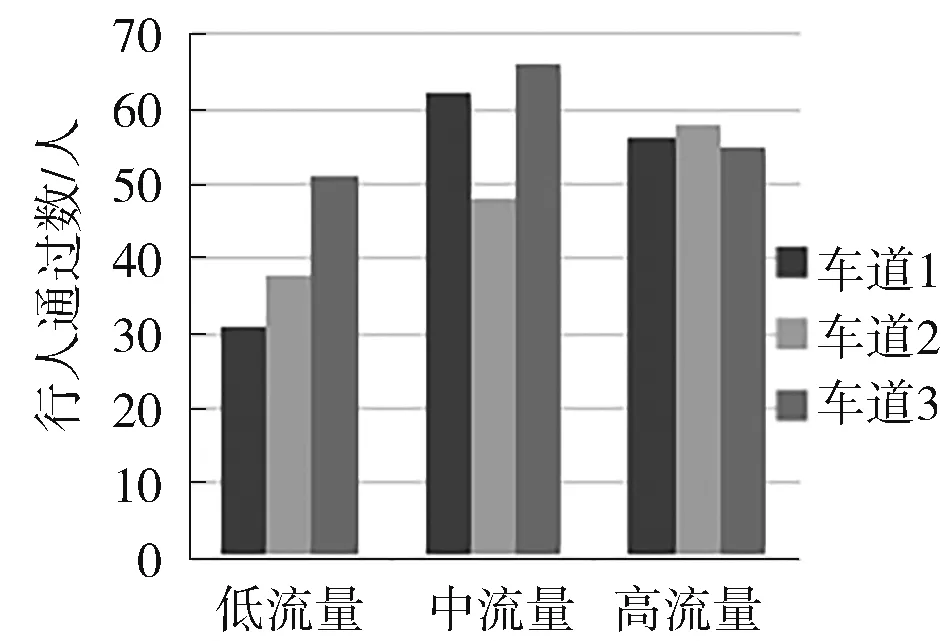
图10 三种流量状态下各车道行人通过与等待情况
可以从图10中行人通过数与等待数得出,过道时在车道边等待的行人数量基本与过道行人的总数成正比,即从宏观角度看行人的延误比例与人车流量正相关.为了深入探究在不同流量状态下,行人过道时等待的具体时间差异及微观影响因素,对行人过道的平均延误时间、最大延误时间进行统计图11所示.

图11 三种流量状态各车道行人平均延误时间与最大延误时间
由统计结果可以看出,宏观方面随着人车流量增加,同一车道中行人的平均等待时间也有所增加,但增幅较小,可以认为行人与行驶车辆的交互对行人过道行为影响较低.相比于平均延误时间,最大延误时间更能凸显微观因素的影响.最大延误时间方面,高流量状态下车道2的最大延误时间为车道3的4.7倍,为车道1的1.6倍.从微观角度可以认为,与停车位交互的车辆对过道行人的影响大于正常行驶的车辆对行人的影响.即在同等环境条件下,行人位于与停车位交互较多的车道中延误时间更久的概率较大.
4.4 行人安全性分析
在上述场景中,人车混行不仅仅会造成人车延误损失,同时由于车辆与行人多次交互过程中,当l 图12 各车道在三种流量状态下危险情况模拟 随着人车流量的增加,各车道内由于人车交互的增加产生的危险情况次数也越来越多.发现高流量状态下车道2危险情况的次数相比于低流量状态平均增加了11.7次.该状态下车道1、2人车流量与交互次数相近,但车道2内危险情况发生次数的增幅却是车道1危险情况发生次数增幅的2.8倍,是车道3危险情况发生次数增幅的7.3倍.通过上述分析能够得出,车道2内车辆与停车位的交互对危险情况的发生有着较大影响. (1)本文基于元胞自动机模型提出考虑微观人车交互行为对疏散影响的数值模拟方法,通过典型商业地下停车场进行工程实践,证明该方法能够较好的模拟此类复杂人车交互场景;(2)通过三种流量状态下对人车延误时间和危险情况进行数值统计,三条车道的最长延误时间和危险情况随流量改变差异逐渐凸显,高流量状态下的车道2最为突出;(3)在道路承载能力范围内,地下商业停车场中车道内车辆与停车位的交互行为是影响人车混流过程中行人与车辆通行延误时间和人车混流交通安全的主要因素.
5 结 论
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
海峡姐妹(2020年8期)2020-08-25
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
智能计算机与应用(2018年5期)2018-10-20
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18