无人机视觉测流技术在河流流量监测中的应用
2022-07-29 03:04赵建华阮哲伟孙圣舒施韶晖龚靖培
江苏水利 2022年7期
赵建华,叶 文,阮哲伟,孙圣舒,施韶晖,龚靖培
(1.江苏省水文水资源勘测局宿迁分局,江苏宿迁 223800;2.南京昊控软件技术有限公司,江苏南京 210000)
1 概述
在水文测验工作中,常规的测量方法包括浮标法、流速仪法等。
浮标法[1-2]一般采用细长的浮筒样式,采用常规前方角度交会法定位测量,浮标法存在着测量精度低,劳动强度大,工作效率不高,易受天气和环境影响,内业数据处理自动化程度不高的等缺陷。流速仪法[3-5]是目前主流的测量手段,流速仪的种类繁多,目前水文测验中较为常用的是ADCP多普勒流速仪[6-8]。ADCP的特点是数据准确,但是作为接触式的测量技术,仍然存在设备架设成本高及作业风险大等缺陷。
近年来,一些厂家把雷达流速仪、雷达水位计和无人机技术相结合推出了无人机雷达测流系统[9-11],实现了对河流表面流速的非接触测量的模式。无人机雷达测流系统继承了无人机的高机动性和灵活便捷的优势,同时能够基本满足水文测验的基本要求,尤其在条件恶劣的应急测流场景下能够更安全、更高效地获得准确的数据。但是由于数据精度容易受到风浪的影响,雷达流速仪在低流速场景下的应用效果并不好。
视觉测流技术[12]是一种基于图像的河流水面图像测速技术。相比于雷达法等非接触式测流技术,视觉测流技术具有瞬时全场流速测量的特点,在快速获取瞬时流场、湍流特征、流动模式等方面具有明显优势。视觉测流技术以天然漂浮物及水面纹理模态作为示踪物,通过智能识别算法精准甄别波浪、纹理及示踪物,使得视觉测流技术在低流速场景具有更优异的数据表现,更适用于天然河道表面流速及流量的监测。
2 系统组成
无人机视觉测流系统是以无人机平台搭载专业视觉流速测量仪,采用自主研发的HAIT算法引擎对野外河道流速、流向进行测量。该系统的核心技术基于自主开发的表面流场计算(HAIT)算法引擎。该算法引擎集图像识别技术、粒子图像测速技术与粒子追踪测速技术于一体,支持图像追踪的处理算法和超细化流场速度分布分析,最小可实现4×4像素矩阵的速度矢量分析。无人机视觉测流系统的测量方式、数据传输和数据表达符合水文规范要求。
无人机视觉测流系统(图1)主要由机体、飞控系统、通讯系统、动力系统、视觉测流仪、粒子抛投器和地面站组成。

图1 无人机视觉测流系统
(1)机体主体为碳纤维材质,结构轻质同时具有较高的强度。气动布局采用四旋翼的整体结构,具有高效的气动效率和灵活的机动特性。
(2)飞控系统位于机体主仓内,负责整架飞机的运动控制、智能导航和安全保障等。飞控系统接入各类传感器的实时数据,包括位置、高度、航向和姿态,指引无人机按照预定的航线精准飞行。
(3)通讯系统负责无人机与地面站之间的信息链路搭建。通过电台的不同频段,实现无人机与地面站之间的状态数据、遥控信号和视频图像的实时传输。
(4)动力系统包括电池、电调、电机和螺旋桨,分别负责无人机的能源供给、电流分配、能量转化和产生升力。动力系统的稳定运行是无人机飞行安全的重要保障。
(5)视觉测流仪是一台高性能工业相机,通过三轴增稳云台与无人机固连,安装于无人机的正前方。视觉测流仪通过数据传输线缆与通讯系统建立双向链接,一方面向地面站传输视频影像,另一方面接受来自地面站的控制信号。三轴增稳云台能够控制视觉测流仪的测量姿态与朝向,应用于不同的测量场景。
(6)粒子抛投器用于抛撒示踪颗粒,安装于无人机的正后方。由阀门控制每次抛投的粒子数量,由飞盘将粒子水平向后抛撒。
(7)地面站由遥控器和控制软件组成。遥控器的物理按键能够对无人机、视觉测流仪和粒子抛投器远程控制,控制软件提供了飞行控制、状态显示、任务规划、数据展示、报表导出等一系列功能模块。
3 测量方法
无人机视觉测流系统在河道流量测验中所使用的方法为流速面积法。在监测断面上根据水文测验规范选取多条垂线,无人机飞行至垂线正上方悬停进行视觉流速测量,依次获取每条垂线的表面流速。选取合适的系数计算垂线平均流速,再乘以对应的部分断面面积求得部分流量,将部分流量求和得到全断面流量。
无人机会精准执行地面站预设的飞行任务,开启自动飞行。无人机从左岸起飞并飞向测点位置,通过RTK的精准定位悬停在测点正上方,通过毫米波雷达定高传感器保持距离水面的高度。无人机稳定悬停后,根据罗盘调整无人机的方向,使得机头朝向垂直于断面线并指向下游,同时视觉测流仪的三轴增稳云台调整视觉测流仪的拍摄视角,使得相机铅垂向下,测量垂线处于图像画面的中心位置,如图2所示。
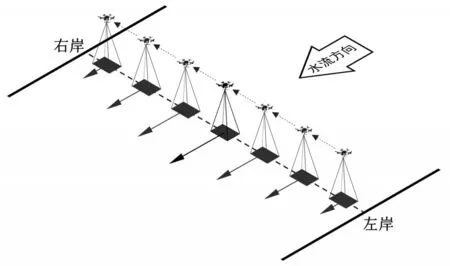
图2 无人机测流系统的测验模式
开始测量后,地面站自动控制粒子抛投器,向上游抛撒示踪颗粒,示踪颗粒会随着水流向下游漂流进入相机视野,智能算法准确地识别示踪颗粒,并实时计算出示踪颗粒的流动速度作为该测点表面流速V1。重复以上测量流程,将所有测流垂线的表面流速(V1,V2,…Vm)依次测出后,使用流速面积法计算河流全断面流量Q,如图3所示。

图3 断面流速分布及断面地形
全断面流量的计算公式为

式中:Q为全断面流量,m3/s;μi为垂线表面流速求解垂线平均流速的修正系数;Vi为垂线表面流速,m/s;Si为垂线对应的部分断面面积,m2;m为垂线总数量。
4 比测试验
2022年1月20日,在长江干流开展了无人机视觉测流系统与走航式声学多普勒流速剖面仪(ADCP)的比测试验。无人机视觉测流系统导入断面地形数据后,规划自动测验任务。走航式ADCP的测验流程遵循河流流量测验规范(GB50179—2015)。
无人机视觉测量系统与走航式ADCP同时开始施测,断面宽度约2 200 m,水位14.30 m。无人机视觉测流系统选取5条垂线,起点距分别为800 m、1 031 m、1 262 m、1 493 m、1 724 m。无人机从起飞到降落完成整套施测流程,共用时16 min,垂线表面流速数据见表1。

表1 无人机视觉测流系统的垂线表面流速测量结果
5条垂线的表面流速分别为0.808 m/s、0.937 m/s、1.250 m/s、1.414 m/s、1.344 m/s。根据水文测验规范流速面积法求得断面虚流量为15 040.0 m3/s,根据该断面浮标系数的经验取值,浮标系数μ取0.86,因此断面流量为12 934.4 m3/s。
断面流速分布如图4所示。

图4 无人视觉测流系统测验的表面流速分布
同时进行测验的走航式ADCP的断面流量测验结果为12 400 m3/s。通过分析可知,无人机视觉测流系统本次流量测验的误差为4.3%。
5 结语
作为非接触测量技术,比测试验体现了无人机视觉测流技术在实际应用中的便捷、高效和精准的优势。
(1)得益于无人机平台的便携性,无论是山区河流还是平原河流,无论是应急监测还是常规测验,无人机视觉测流系统都能够即开即用。
(2)无人机平台的高机动性,有助于测流系统能够高效地完成河流所有垂线的测验任务。
(3)视觉测流算法智能且精准,能够准确识别河流表面漂浮物和纹理模态,量程覆盖从低到高的全速域范围并确保数据精准,且系统测流误差小于5%,解决了测流仪器在低流速场景下数据失真的技术问题。
猜你喜欢
治淮(2022年11期)2022-12-03
黑龙江水利科技(2022年4期)2022-05-25
新世纪智能(教师)(2021年2期)2021-11-05
小学生学习指导(中年级)(2021年10期)2021-11-01
陕西水利(2020年4期)2020-06-04
节水灌溉(2019年6期)2019-06-24
考试周刊(2016年88期)2016-11-24
小雪花·成长指南(2016年8期)2016-09-21
少年科学(2014年10期)2014-11-14