聚光跟踪光伏光热一体机联动装置的研制
2022-07-29 10:06张德胜
光源与照明 2022年4期
张德胜
乌鲁木齐智源易通智能科技有限公司,新疆 乌鲁木齐 830000
0 引言
太阳能聚光发电技术是近年来国内外学者关注的一个重要课题。采用聚光、自动追踪太阳方位及高度角的方法,可以使聚光器与聚光器的总夹角保持一致,保证所有的光都集中在电池板上,从而提高太阳能板的光照。同时,太阳能集热器的效率也得到了极大的提升,从而极大地减少了太阳能发电系统的造价[1]。
聚光器对太阳的跟踪精度会对聚光效果产生很大的影响。目前,传统的集流器均为单机操作,每个集流器配一组跟踪设备,并配有独立的追踪控制线路。通常采取增大聚光板照明面积的办法来减少跟踪费用,但这通常需要加大聚光板的体积和质量,从而增加了安装的难度。
1 聚光跟踪光伏光热一体机概述
1.1 聚光原理
聚光跟踪光伏光热一体机(以下简称“一体机”)采用了追踪式集光技术,可以让太阳能板获得更多的光照,从而增加太阳能板的功率。一体机的聚光原理如图1所示。在聚光架的底部安装有一个平面反射镜,该平面反射镜借助太阳追踪装置使阳光总与聚光架保持一定角度;被平面反射镜反射的太阳光会均匀地集中在聚光电池板上,由此实现多聚光效果;聚光电池板可以通过冷却器中的水介质吸收光热,实现光电、光热的联用;在聚光器的顶端,还有一个朝向阳光的平板电池,其可以直接吸收阳光。
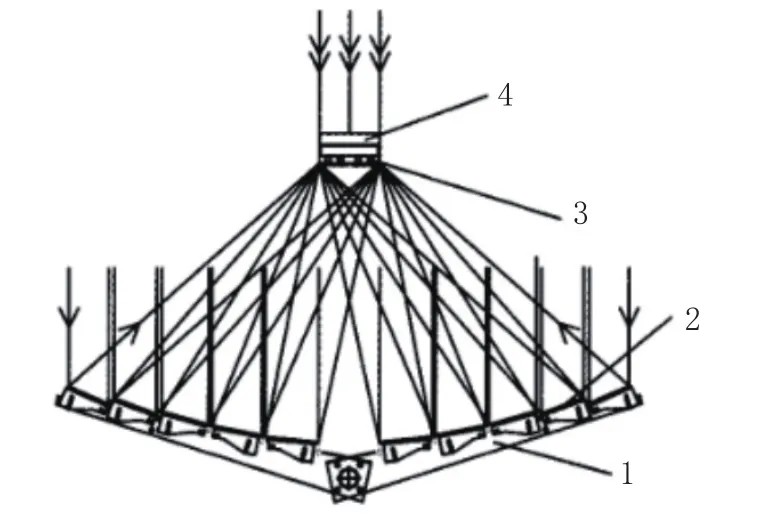
图1 聚光原理
1.2 聚光装置的结构
在一体机的微型聚光装置中,左右2个反光单元由1根驱动框架横梁固定。左右2个反光单元都由1个镜架、1个平面镜和1个聚光电池板组成;驱动框架能够带动左右2个反光单元绕着高度角传动轴转动,由此跟踪太阳高度。聚光装置整体由方位连接块固定在方形角度驱动的长轴上。小型聚光装置的镜框大多采用冲压成型技术,既能提高聚光板的精确度,又能减少生产成本。
2 一体机联动装置的结构和传动分析
2.1 装置结构
一体机联动装置包含2台或多台微型聚光器,所有微型聚光器均以一条长的传动轴为基础,用多个支柱支承,并利用一个定向传动装置带动长轴旋转,这样可以将全部的聚光器连成一体追踪太阳的方向。所有微型聚光器均可围绕相应的倾斜轴旋转,利用四边形的平行连杆将其串联,并利用倾斜角度的传动装置使其摇晃,可以使全部的聚光器互相配合,以实现对太阳角度的同步[2]。
每个聚光器的传动轴用一个连杆紧固在一个方向的传动轴上,再用另一个方向的驱动器控制旋转,这样可以让所有的聚光器都跟着旋转。高角度连杆将各台聚光器串联起来,构成一个平行四边形的结构,通过角度传动装置带动4个并排的四边形结构,从而使聚光器围绕相应的角度传动轴线旋转,同时追踪太阳角度,使所有聚光器都能在2D方向上进行连杆追踪。
2.2 传动分析
2.2.1 方位角传动分析
在聚光跟踪过程中,存在传动间隙,使跟踪不稳定,因此,要选择具有较少齿距的驱动装置,以减小螺杆的齿隙[3]。在实际应用中,使用了一种动力推进装置,该装置是以直流马达与螺帽为基础的动力装置,可以间断地驱动装置来追踪太阳方向,从而达到精确的驱动效果[4]。定向驱动装置结构如图2所示,全部聚光装置均与方位角传动长轴相连,摆杆的一端连接方位角传动长轴,另一端连接方位角电动推杆。摆杆的旋转由方位角电动推杆的伸长和收缩驱动,而方位角传动长轴的旋转由摆杆驱动,从而可以使全部的聚光装置跟随太阳方向的改变及时旋转。

图2 方位角驱动装置结构示意图
在旋转聚焦支架时,摆杆与方位角电动推杆之间的夹角a1减小,使方向驱动力矩减小。定向角度的传动扭矩Ma为

式中:Fa为方位角电动推杆的推力;B1为摆杆的长度。在8级大风(风速为17.2~20.7 m/s)时,集光设备可承受的最大风压为267.5 Pa。利用集光器最大迎风面积和平均力臂,可以求得方位角风载阻扭矩Maf;根据支座重量、重心与驱动轴的偏差值,可以求得方位角中心阻力矩Maz。测量方向传递力矩Ma为

从式(1)和式(2)得出,方位角电动推杆的推力Fa为

方位角的跟踪精度受丝杆传动间隙ΔD的影响,根据摆杆的长度B1可以得到方位角的跟踪偏差Δωa为

2.2.2 高度角传动分析
高度角度传动装置中,聚光装置可以围绕相应的高度角传动轴旋转;所有聚光装置由高度角联动架连接,构成一个平行四边形的连杆装置;该平行四边形连杆装置通过高度角电动推杆驱动,使全部的聚光装置围绕相应的高度角传动轴旋转,从而同步追踪太阳高度角度的改变。
当聚光支架旋转时,高度角电动推杆和高度角传动轴之间的角度(a2+β)减小,高度角的驱动力矩Me为

式中:a2+β为高度角;Fe为高度角电动推杆的推动力;B2为高度角传动轴的长度。高度角度的传动扭矩Me可以根据高角度的风载阻力扭矩Mef和高角度的中心阻力扭矩Mez确定:

从式(5)和式(6)得出,高度角电动推杆的推动力Fe为

高度角的跟踪误差主要与螺杆驱动的间隙ΔD和高度角连杆的长度偏差ΔL有关,利用高度角传动轴的长度B2可以得到的高度角跟踪误差Δωe为

3 实例分析
3.1 设备参数
基于以上研究成果,研制了一台1 kW的一体机,其使用了4个方向的驱动装置,使4个聚光器相互配合,能够对太阳光进行2D的追踪。
设备的结构参数:长度为12 000 mm,宽度为2 400 mm,高度为2 000 mm,每个单元的照明区域为15 m;机构重量为426 kg,整体重量为582 kg;每个单元均有5个支柱,以3.2 mm厚的超级白色镜子聚集阳光(北方有冰雹或大雪时,可增加玻璃的厚度)。
3.2 传动分析
根据集流板的外形计算得到,在8级大风时,风向角的风荷转矩为360 kN·m,在较高的风向角风荷载下,风荷转矩为320 kN·m。计算支架的质量、中心到传动轴的间距,得到中心阻力矩为60 kN·m,高转角的中心阻抗力矩Mez=60 N·m;方位角摆杆的长度B1=600 mm,高度角传动轴的长度B2=500 mm。由式(3)得出,在这一时刻,方位角电动推杆的推力最大,Famax=1 400 kN。若a2=45°,由式(7)得出,在a2=45°,β=-15°时,高度角电动推杆的最大推力为Femax=1 520 kN。出于安全原因,采用了3 000 kN的电力推进器和推进器。
收集器采用电动推杆加工的螺杆,螺距D=0.2 mm,而高角连接杆的长度偏差为0.3 mm。若a1=90°,由式(4)得出,在a1=90°的情况下,最大的方位角跟踪误差Δωa=0.02。根据式(8)得出,在a2=90°,β=15°的情况下,最大的高度角跟踪误差为Δωe=0.13。实践表明,普通蜗轮蜗杆机构的轨迹跟踪误差小于0.5,而连杆跟踪误差小于0.2,提高了平面反射器的收光率,降低了太阳能电池的成本。
3.3 应用效果
项目研制的单片机螺旋驱动机构采用金属保护套,可有效地避免风沙侵袭,并在每一面都留有孔洞;所有的金属支架都经过热镀锌,每一层的采光面积都是28.4 kg,特别适合用于宾馆、工厂、住宅的钢筋混凝土屋顶。研制的样机已在厦门某大厦的楼顶进行了一年的实验,虽然受到多次强风的影响,但样机保持良好,这表明其可以承受很大的风暴。
(1)经济效益。与常规平面晶硅光电系统相比,文章研制的一体机联动装置降低了系统造价,减少了聚光器、跟踪系统和集热器的费用。对5 kW一体机电站和5 kW平板电站进行实时监测和综合分析,得到的结果如表1所示。根据表1可知,一体机电站的成本比平板电站低。
(2)发电效果。在厦门集美地区发电6个月(2020年7月1日—2020年12月31日)后,两者的总发电能力相当,平板电站发电量为2 167 kW·h,一体机电站发电量为2 173 kW·h;一体机电站还能得到等同于4 328 kW/h的电热(平均水温为52 ℃的热水)。一体机电站的占地面积是平板电站的15倍,其整体性能比普通电站高出许多。
4 结论
文章开发的聚光跟踪光伏光热一体机联动装置采用2个电子推棒驱动多个聚光装置,实现对太阳方向和高度的跟踪,从而改善了聚光器的稳定性、跟踪精度和聚光效果(聚光效率提高了5%)。利用连杆可以降低聚光支架的高度,整体聚光部件由多根支柱承担,平均承载为197.96 N/m2;安装时无须使用升降装置,降低了安装和维护费用。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
山东冶金(2022年1期)2022-04-19
文萃报·周二版(2019年48期)2019-09-10
制造技术与机床(2019年8期)2019-09-03
中学生数理化·八年级物理人教版(2018年12期)2019-01-31
中国核电(2017年1期)2017-05-17
电源技术(2016年9期)2016-02-27
凿岩机械气动工具(2015年1期)2015-11-11
太阳能(2015年6期)2015-02-28