
基于设计结构矩阵的襟翼作动系统架构设计
2022-08-03 01:30杨建忠孙晓哲
中国民航大学学报 2022年3期
杨建忠,陈 棒,孙晓哲
(中国民航大学安全科学与工程学院,天津 300300)
在传统的飞行控制系统中,升降舵、副翼和方向舵等操纵面分别执行特定功能,升降舵控制俯仰,副翼控制滚转,方向舵控制偏航。随着飞行控制系统功能的增强,要求单个操纵面具备多个功能,如通常可用于提供高升力的襟翼也可用于滚转控制[1-2],因此要求襟翼能够独立作动。
新的附加功能及其相应的设计要求对系统架构设计施加了新约束。襟翼作动系统非常复杂,具有大量的物理连接与信号传递。设计适应多功能飞行控制要求的襟翼作动系统架构是一项复杂而艰巨的工作[3]。
Reckzeh[4]提出了功能驱动设计方法,该方法是从基于知识的设计过渡到功能驱动的设计,探索功能融合的系统架构设计。Lampl 等[5]提出了基于功能多域矩阵的设计方法,应用于飞机系统初期设计阶段的功能配置或系统的改装研究,从功能出发进行系统架构设计,但未能在计算机上实现。Bauer 等[3]利用设计结构矩阵(DSM,design structure matrix)结合聚类算法生成襟翼作动系统架构并证明了该方法的可行性,但并未考虑系统冗余。
综上,本文以传统的A320 襟翼作动系统为参考对象,通过DSM 结合聚类算法并考虑系统冗余生成满足多功能要求的襟翼作动系统架构。
1 设计结构矩阵及模型建立
1.1 设计结构矩阵
DSM 最早由美国学者Steward 提出,是针对复杂系统设计管理分析的一种工具。DSM 作为复杂系统建模和分析工具,表示不同元素之间相互作用,这些元素的形式可以是物理组件、设计团队、系统、设计参数或任何发生交互的项目[6-8]。DSM 一般为n×n 的矩阵,以图1 为例,矩阵中含有A、B、C、D、E 5 个元素,对角线处的黑色块表征元素本身,无其他含义,在对角线以外“X”标记的单元格表征元素间有一定联系。
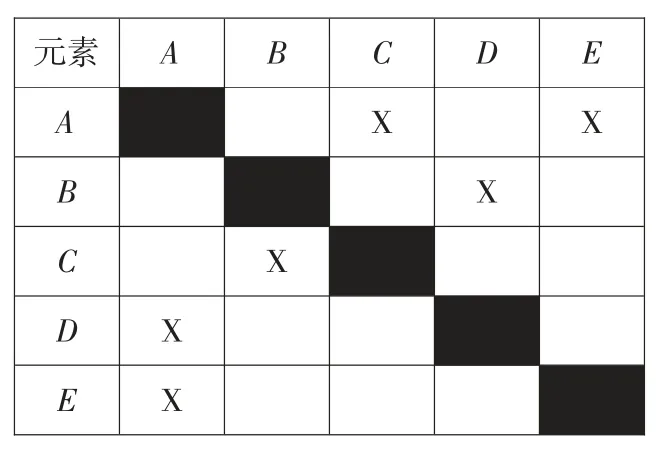
图1 设计结构矩阵示例Fig.1 Example of design structure matrix
图1 元素间的信息流向如图2 所示,如:对角线下方的第E 行第A 列被标记的单元格(A,E),表征信息从A 流向E(A→E);对角线上方的第B 行第D 列所标记的单元格(B,D),表征信息从D 流向B(B←D);若无标记的单元格,则表示两元素没有联系。
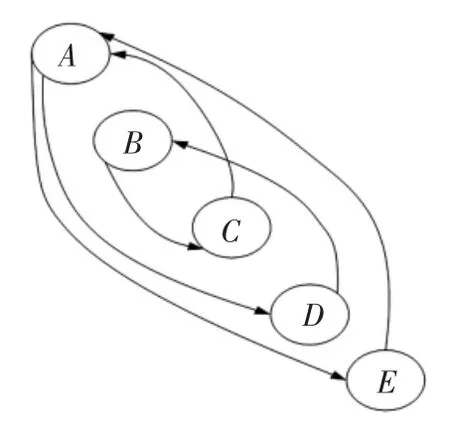
图2 DSM 示例对应的有向图Fig.2 Diagraph corresponding to the DSM example
1.2 襟翼作动系统DSM 模型
1.2.1 初始功能模型
系统的功能模型是标识系统功能及其交互联系的抽象概念,表示能量、物质或信号信息流在系统元素间的传递,定义了各功能将如何协同运行以执行系统任务[6]。
以A320 襟翼作动系统为研究对象,提取A320 襟翼作动系统的功能元素,其系统简化示意图如图3所示。根据各元素间的联系建立系统功能模型,由于对称性,在分析阶段仅以一侧襟翼作为分析对象,A320襟翼作动系统功能模型如图4 所示。

图3 A320 襟翼作动系统示意图Fig.3 Architecture of A320 flaps actuation system
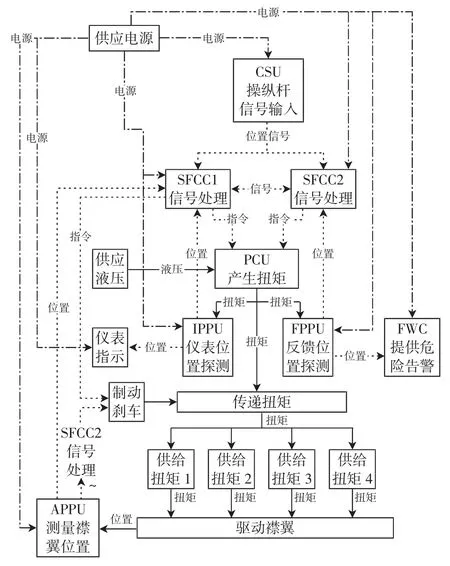
图4 A320 襟翼作动系统功能模型Fig.4 Function model of A320 flaps actuation system
图4 中:电信号由“虚线”表示,如控制指令信号、位置信号等;电源的供给由“点划线”表示;扭矩传递、液压的流动由“实线段”表示;每种类型的信息流、能量的流动及能源的供给均在线上标注。操纵杆信号经过命令传感组件(CSU,command sense unit)输入到襟翼控制计算机(SFCC,slat flap control computer)SFCC1和SFCC2 进行信号处理,然后给功率控制组件(PCU,power control unit)发出控制指令产生扭矩,PCU 有2 套位置检测装置——仪表位置探测组件(IPPU,instrument position pick off unit)和反馈位置探测组件(FPPU,feedback position pick off unit),其中:IPPU 直接采集PCU 的位置信息,一路发送至仪表指示,另一路发送至SFCC1;FPPU 在采集PCU 位置信息后,一路发送至飞行告警计算机(FWC,flight warning computer),另一路发送至SFCC2。PCU 产生的扭矩经过传动轴、齿轮箱、作动器等将扭矩分为4 路传递到内、外襟翼。在襟翼外侧有不对称位置探测组件(APPU,asymmetry position off unit)探测襟翼位置,将位置信号发送到SFCC1 和SFCC2[9]。由于内、外襟翼由襟翼固定锁连接,同步作动,所以使用“驱动襟翼”表示该功能。
1.2.2 设计结构矩阵构造
根据图4 的A320 襟翼作动系统功能模型,基于模型中各功能模块间的关系,如能源、控制指令信号、位置信号等,构造襟翼作动系统架构的功能模型原始及修改后DSM 如图5 所示,其中:第1 列为原始DSM元素名称,第2 列是修改后DSM 元素名称;第2 行和第3 列表示修改后DSM 元素编号;矩阵对角线上的黑色块表示系统元素本身,无其他意义;对角线两侧蓝色块表示行列元素之间的联系及方向;无标记的单元格,则表示两元素无关联[10]。整个DSM 表示整个襟翼作动系统功能间作动能源(液压源、电源)、指令与控制、监控等信号的传递[11-12]。
飞行阶段襟翼作动系统能够提供附加的辅助滚转控制功能,需要实现外襟翼和内襟翼的独立控制与驱动,因此,在原始襟翼作动系统功能DSM 上进行如下改进,在图5 中以灰色进行标记。

图5 改进前、后襟翼作动系统功能DSMFig.5 Functional DSM of improved fore/aft-flap actuator system
(1)为了实现外襟翼和内襟翼的独立作动,增加2个控制扭矩1、2,每个控制扭矩单元都接受来自SFCC1 和SFCC2 的控制指令。由控制扭矩1、2 对来自PCU 的扭矩进行独立控制,实现外襟翼和内襟翼的独立偏转作动。在修改的DSM 中以编号10 和11 的控制扭矩1、2 及与其他元素的联系表示。
(2)增加2 个测量扭矩1、2,分别测量供给到外襟翼和内襟翼的扭矩具体数值,发送到控制扭矩1、2,以实现控制扭矩单元的精准控制。在修改的DSM 中以编号为12 和13 的测量扭矩1、2 及与其他元素的联系表示。
(3)由于外襟翼和内襟翼可以独立驱动,所以将“驱动襟翼”变更为“驱动外襟翼”与“驱动内襟翼”,即编号18、19。
(4)将原本测量整体襟翼位置的功能改变成测量外襟翼和内襟翼的位置,然后发送到处理信号SFCC1和SFCC2。在修改的DSM 中以编号20 和21 的测量襟翼位置1、2 及与其他元素的联系表示。
通过上述修改,断开了外襟翼和内襟翼的同步作动,增加了外襟翼和内襟翼各自独立的控制器和作动器,仅以较小修改实现了外襟翼和内襟翼独立控制和驱动。
2 系统功能架构生成
2.1 聚类算法
对于DSM 的运算方法主要有:划分、撕裂、绑定、聚类等[12],根据DSM 类型选择不同的运算方法,基于功能的DSM 常选择聚类算法。聚类算法是把DSM模型中联系紧密的行、列元素归入同一类中,使得聚类内部元素的联系强度更高,而聚类之间的联系强度较低[10]。
协调成本是DSM 模型聚类划分时行、列元素之间联系所涉及的交互管理成本[10],计算得出的协调成本表征聚类结果的优劣,值越低,表示协调成本越低,聚类效果越好。
DSM 模型在聚类划分下的总协调成本为


mi和ni为第i 个聚类中第1 个元素和最后一个元素的编号;为聚类外部第i 和j 聚类间的协调成本值

式中:Si为第i 个聚类内所含元素数;d 为元素间的联系值,取常数值1。
以总协调成本C 最小作为聚类的目标,设计聚类程序,聚类步骤[7]如下:
步骤1首先每个元素都单独为一个聚类;
步骤2计算整个“聚类矩阵”的总协调成本C;
步骤3随机选择一个元素(等价为单独聚类i),计算所有聚类对所选元素的出价;
步骤4选择随机数N∈[1,rand_bid](rand_bid是由Matlab 中rand 函数生成的均匀分布随机数);
步骤5如果所选元素成为出价最高的聚类成员,则计算总协调成本(如果步骤4 中N=rand_bid,则使用第二高的出价);
步骤6选择随机数M∈[1,rand_accept](rand_accept 是由Matlab 中rand 函数生成的均匀分布随机数);
步骤7如果新的协调成本低于旧的协调成本或在步骤6 中选择的数字等于rand_accept,则替换旧的协调成本,否则不进行更改;
步骤8返回到步骤3,重复执行,直到达到设定次数为止。
在算法中使用了模拟退火的思想,避免陷入局部最优,体现在:步骤5 中通过随机数N 选择第二高的出价,而不是最高的出价;步骤7 中通过随机数M 更新协调成本值。
参数的选取首先参考文献[7,11],将图5 所示的襟翼作动系统功能DSM 输入到算法中,在反复试验的基础上,逐渐完成参数的调试,如表1 所示。

表1 聚类算法参数值Tab.1 Parameter values of clustering algorithm
2.2 算法运行结果
利用表1 所示的参数执行聚类算法生成1 000个功能架构。整个系统架构生成过程是随机的,循环数越多,则聚类算法探索架构生成空间越大。但为了平衡算法的执行时间,选取循环数为1 000 次。图6 为1 000 次重复执行聚类算法,每次运算产生的最终总协调成本值曲线。

图6 执行1 000 次聚类算法的协调成本曲线Fig.6 Curve of coordination cost value executed 1 000 times
聚类算法以总协调成本值最低作为优化目标,根据图6 所示的“*”标记处,第868 次运行结果中总协调成本值最小为436。提取第868 次运行的数据,展现在该次聚类过程中总协调成本的变化,在第868 次运行中总协调成本变化如图7 所示,图7 中“*”标记处为该轮运算经过145 次迭代,总协调成本首次达到最小,之后稳定在436,聚类后的DSM 如图8 所示。

图7 第868 次执行算法协调成本曲线Fig.7 Coordination cost curve of the 868th execution algorithm

图8 第868 次执行算法的DSMFig.8 DSM of the 868th execution algorithm
从图8 可看出,将23 个元素聚类成6 个聚类,其中,C6 作为独立Bus 类,由于第23 号元素与大部分元素均有联系,在聚类前提取出来不参与聚类。各聚类所包含的元素如表2 所示,根据每个聚类所包含的元素,分别将聚类1~6 命名为:C1 产生扭矩-仪表指示;C2 内襟翼控制-驱动单元;C3 指令-监控单元;C4 外襟翼控制-驱动单元;C5 危险告警单元;C6 供应电源。其中:C3 中把测量襟翼位置1、2 与处理信号SFCC1和SFCC2 聚类到一起,可理解为襟翼位置作为控制单元核心输入对差动控制具有重要作用;C2 和C4 分别包含内、外襟翼的控制,供给扭矩及驱动,且C2 和C4之间没有直接联系,因此,达到了内、外襟翼能够独立控制,实现差动的目的。
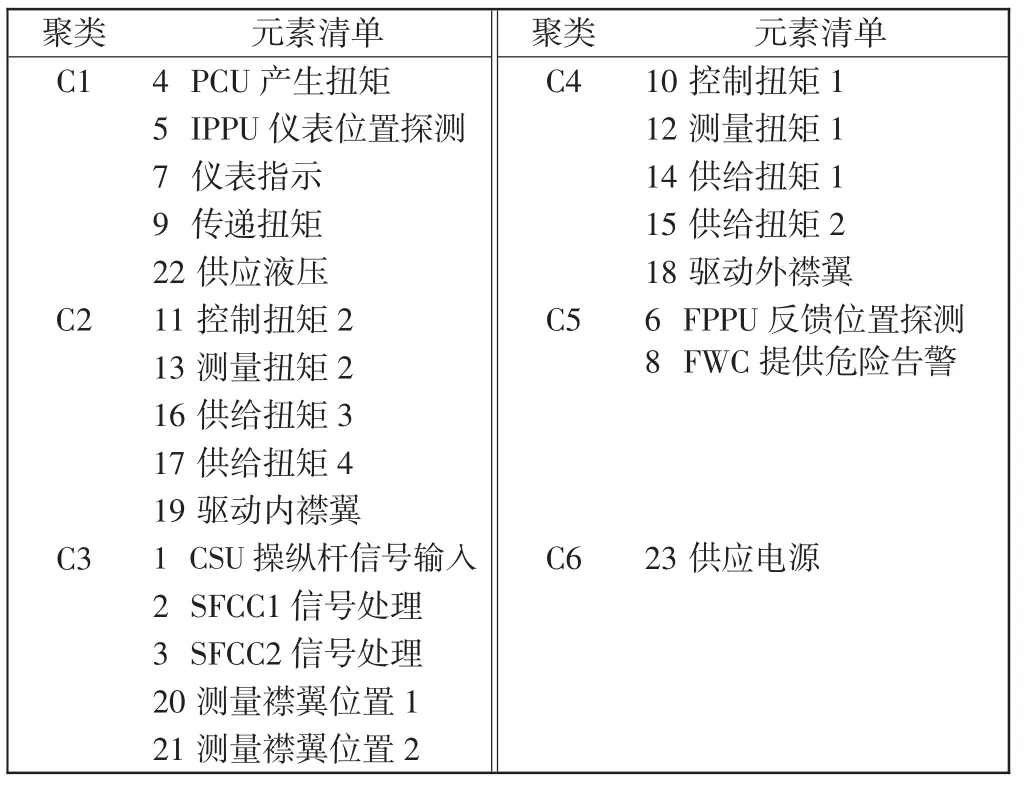
表2 聚类包含元素清单Tab.2 List of cluster elements
为了进一步探究C1~C6 间的联系,根据图8,表征聚类之间的联系,形成了聚类后的襟翼作动系统功能模块架构图,如图9 所示。

图9 聚类后的襟翼作动系统功能模块架构Fig.9 Functional module architecture of flap actuation system after clusting
由图9 可看出,C3 单元发出控制指令,控制C1产生扭矩,然后传递到C2 和C4 单元,由各自的控制模块根据来自C3 单元的指令进一步精确控制扭矩大小,驱动内、外襟翼,实现独立控制。C3 单元内的测量襟翼位置1、2 分别测量外襟翼和内襟翼的偏转角度,将位置信息发送到C3 内的信号处理模块,形成闭环反馈。
由此,通过DSM 矩阵的聚类算法,使得功能实现模块化和集成化,生成了满足内、外襟翼独立作动要求的襟翼作动系统功能架构。
3 新的襟翼作动系统物理架构
DSM 聚类算法所生成的襟翼作动系统功能架构能够为物理架构的设计提供顶层指导,根据每个模块所表示的功能进行物理架构设计,通过选择不同的技术解决方案(物理元素)来实现多种物理架构。
以最小更改为原则,结合图9 襟翼作为系统功能模块架构,C1、C3、C5、C6 选择的技术解决方案与原始A320 的计算机系统、作动能源类型、指示告警、电源一致;C2 和C4 作为内、外襟翼控制-驱动单元,与原始架构不同的是分别在其内部引入独立控制驱动模块。最终,设计物理架构如图10 所示,在最终的物理架构中将另一部分的襟翼对称表示出来。同原始架构相比更改如下:①新增襟翼控制-驱动模块:L1、L2、R1、R2;②新增内襟翼位置探测组件:S2、S3;③新增信号传递,其中,“虚线”表示新增控制指令信号,“点划线”表示新增反馈信号。

图10 襟翼作动系统物理架构Fig.10 Physical architecture of flaps actuation system
图10 中黑色粗线表示扭矩的传递路径,其余黑色线段所示的信息路径与A320 襟翼作动系统架构一致。
在新的物理架构中,每个控制-驱动模块有主-主式指令信号通道,接收SFCC1 与SFCC2 指令信号。襟翼位置传感组件通过主-主式的传递通道,将位置信号发送到SFCC1 与SFCC2。与A320 原始系统架构相比,不仅实现了襟翼独立控制,且增加了信息传递路径,襟翼控制更为精确。
4 结语
为满足襟翼辅助滚转的多功能要求,在原始的A320 襟翼作动系统架构上,通过分析功能模型建立襟翼作动系统的DSM 模型;直接在DSM 模型上进行修改并引入满足多功能要求的元素,采用聚类算法得到新的襟翼作动系统功能模块架构。最后,以最小更改设计襟翼作动系统物理架构,实现了内、外襟翼的独立控制,满足辅助滚转的多功能要求,验明了使用DSM设计具有新功能需求的襟翼作动系统架构的可行性。
猜你喜欢
汽车实用技术(2022年2期)2022-02-21
汽车实用技术(2021年17期)2021-09-23
汽车观察(2021年4期)2021-05-10
航空维修与工程(2021年3期)2021-04-12
汽车零部件(2021年2期)2021-03-05
民用飞机设计与研究(2020年4期)2021-01-21
装备维修技术(2020年9期)2020-11-20
宇航计测技术(2020年4期)2020-09-10
汽车与新动力(2019年5期)2019-11-07
科学与财富(2018年28期)2018-11-16
