
考虑轨迹分析的车辆异常行为辨识
2022-08-16 07:01杨文杰
重庆理工大学学报(自然科学) 2022年7期
丁 华,杨文杰,姜 超
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
0 引言
随着计算机软件、硬件及视觉技术的快速发展,利用交通视频监控系统提升道路安全管理水平是现代道路安全的重要保障,而基于车辆运动轨迹的行为分析和识别成为最有前景的发展方向之一[1]。通过监控视频对车辆进行跟踪获取轨迹,并对轨迹进行实时处理和分析,自动检测道路中车辆的异常行为,如闯红灯、擅自变道、违章转向、急刹车、超速行驶和车辆逆行等[2-4]。
研究人员对交通监控中识别运动车辆的异常行为方面取得了一些进展。Johnson等[5]和Sumpter等[6]使用自组织特征映射神经网络的方法对轨迹空间模式进行建模。Hu等[7]利用模糊自组织映射方法学习目标的运动轨迹和行为模式,实现对异常事件的检测和判别。杨龙海等[8]提出了基于轨迹数据的车辆异常行为分级检测算法,使用神经网络对不同种类的异常行为样本进行训练识别。以上基于神经网络的学习方法网络设置复杂、学习速度慢,需要大量样本,对实时性要求较高。Cai等[9]提出了一种异常行为检测框架,该框架包括轨迹模式学习模块和异常检测模块,轨迹模式学习模块通过对轨迹聚类并学习方向模式,异常检测模块通过建立每类轨迹的HMM模型来对新轨迹进行异常检测,该方法在训练时需要提前设定状态数目,适用于对场景先验知识比较了解的情况。Athanesious等[10]提出了一种新的基于轨迹聚类方法来检测车辆异常轨迹,结合谱聚类理论和贝叶斯决策理论将事件分为正常和异常,该方法对实时性要求较高,可以通过深度学习的方法来扩展。Xu等[11]提出了双模式检测模型来检测道路交通中车辆异常运动模式,静态模式从背景建模中学习,用来检测在道路中保持静止的异常车辆。动态模式用来检测从跟踪轨迹中偏离主要运动模式的异常行为。该方法检测误差低,在低质量的流视频中有待提升。Piciarelli等[12]提出了一种基于轨迹的聚类方法。异常轨迹通过一系列集群形成的树提取。异常轨迹是那些与树相比概率较小的轨迹。通过这种方法可以很容易地识别出在错误方向上行驶的车辆,但是这种方法不能估计车辆的速度。李永等[13]提出了基于随机森林的车辆行为分析方法,该方法通过拟合跟踪轨迹提取特征值,并将其输入随机森林算法分类器中,对车辆行为进行分析,该方法对车辆的特征值提取较少,识别行为单一。黄鑫等[14]提出了基于监控视频的车辆异常行为检测方法,该方法通过均值漂移算法对速度和角度两个运动特征聚类,得到聚类后统计直方图,由运动特征熵和运动特征标量到聚类中心的欧氏距离来判断车辆有无异常行为。该方法对动态变化场景中车辆异常行为的检测效果较差。Hu等[15]提出了轨迹多层次学习框架来识别异常交通行为,使用贝叶斯决策对车辆的异常换道和掉头行为进行辨识。Wang等[4]分析了复杂场景下常见的车辆异常行为,如异常变道、超速异常、低速异常、逆行等。对于速度异常问题,该方法以简单的道路规定阈值为判别方法,场景适应性较差。通过以上研究发现,无监督学习成为异常检测的热点,该方法不需要轨迹标签,通过对轨迹自动学习建立正常轨迹模型,与正常轨迹对比来辨识新轨迹是否异常,应用广泛。在速度异常的检测中,没有考虑交通流速度大小和不同车型对速度异常的影响。
本文以车辆运动轨迹为研究对象,提出了一种通过轨迹分析辨识交通异常行为的有效方法。首先对获取的轨迹采用DP算法[16]进行压缩,只保留特征点。然后使用改进的Hausdorff距离计算轨迹间的相似度矩阵,采用谱聚类算法学习轨迹空间模式。在此基础上,对每个空间模式进行中心轨迹提取并利用位移向量学习轨迹的方向模式。利用空间模式和方向模式对新轨迹进行混合匹配来检测异常行为。对于每类运动模式,通过速度特征提取,取偏离正常运动区间5%车辆的速度为速度异常阈值,对车辆进行实时速度异常检测。
图1为异常行为辨识流程图。
1 轨迹学习
1.1 轨迹预处理
1)轨迹长度筛选。为保持系统的稳定性,提高聚类准确度,需要采用充分长的运动轨迹进行学习,删除采样点少的轨迹。
2)轨迹压缩。为减少轨迹相似性度量的计算,采用道格拉斯—普克算法(DP算法)对轨迹进行压缩,只保留轨迹的特征点。
1.2 轨迹空间模式学习
轨迹的相似性在运动轨迹聚类中起着非常重要的作用。目前轨迹聚类中的距离度量主要包括基于欧氏距离的方法、基于最长公共子序列的方法、基于动态事件窗口的方法以及基于Hausdorff距离的方法。与其他几种方法相比,基于Hausdorff距离的方法对于轨迹点集之间的相似性度量更为高效。本文采用改进的Hausdorff[17]距离计算轨迹的空间相似程度。假设轨迹集合中存在2条轨迹A={ai,i=1,2,…,N},B={bj,j=1,2,…,M},对于轨迹A上的任意一点ai,在轨迹B上有距离ai最近的点使得:
(1)
那么轨迹AB的空间有向距离则可以表示为:
(2)
式中,NA为A的轨迹点个数。A、B之间的对称距离为:

(3)
由此可以转化为A、B的相似度函数:
s(A,B)=exp(-H(A,B)/2σ2)
(4)
式中,σ为尺度参数。如果h(A,B)越小,A、B空间距离越小,相似度越高。
在计算出轨迹间相似度矩阵后,采用谱聚类算法学习车辆轨迹的空间分布模式。利用谱聚类[18]对车辆轨迹进行聚类,步骤如下:
1)对于给定的m条轨迹的集合Traj={T1,T2,…,Tm},利用改进的hausdorff距离计算轨迹间相似度矩阵,满足式(5)所示条件。

(5)
2)根据相似度矩阵S定义对角矩阵D。对相似度矩阵S中第i行的元素进行求和得到矩阵D的主对角元素Dii,如式(6)所示。
(6)

4)选取与最大的k个特征值对应的k个特征向量x1,x2,…,xk,将这k个特征向量按列构造一个m×k的矩阵X=[x1,x2,…,xk]。对X中的每一行做归一化处理得到一个新的矩阵Y,归一化公式如式(7)所示:
(7)
5)轨迹样本中的每一条轨迹Ti都和矩阵Y中的第i个行向量相对应,最后使用k-means聚类算法将矩阵Y聚成k个类。
6)将样本轨迹中的每一条轨迹按照其在矩阵Y中相对应的行向量的类别进行分配。
1.3 轨迹方向模式学习
1)将轨迹进行空间谱聚类学习后轨迹被有效地划分为轨迹簇。通过提取各类簇的代表性轨迹来表示该类运动模式,对于第k类的任意一条轨迹Ti计算其与该类中其他轨迹的平均距离:
(8)
式中:nk为第k个分布中的轨迹数量。
选取任意分布k中与其他轨迹平均距离最小的轨迹作为该分布的代表性轨迹,该轨迹代表了该场景下第k个运动模式。

2 目标异常行为检测
2.1 轨迹空间匹配
对于每个新轨迹点P(x0,y0),利用中心轨迹的起点和终点确定方程Ax+By+C=0,利用式(9)计算新轨迹点与各个中心轨迹的距离,并将距离从小到大排序,距离最小的代表该点属于该条中心轨迹所在的运动模式。
(9)
2.2 轨迹方向匹配
一个运动模式代表一个特定的运动方向,当新轨迹的方向与正常运动模式的方向不同时,必然会出现交通异常行为,比如逆行。当第一个轨迹点产生时,首先计算该轨迹点所属的运动模式,假设第一个点的方向与该运动模式中心轨迹的方向一致,对于其他的跟踪点(i>1)异常行为检测的方向判别如下:
(10)
式中:cosθ代表向量A与向量B的余弦相似度,取值在[-1,1]之间,向量A表示每个运动模式的位移向量,向量B表示第i个跟踪点和第i+1个跟踪点之间的位移向量。如果第i个点和第i+1个点所在模式不同,则该车发生了变道行为。当cosθ<0时,轨迹与运动模式的方向相反,表示该车辆发生了逆行。
2.3 速度异常检测
笔者提出的速度异常检测方法完全依靠道路的历史数据识别速度轨迹异常的车辆,包括超速异常检测和低速异常检测。该方法主要是通过轨迹的空间模式学习得到各类簇后,提取各类簇中每条轨迹的速度特征,统计每条轨迹的速度变化曲线图,定义95%的行驶车速为正常行驶区间,剩余5%为异常。设置超速行驶和低速行驶的阈值将这些异常的轨迹识别出来。当产生待识别的新轨迹时,以此判断每个点是否在正常的行驶区间内。如果在正常区间,则说明轨迹正常;如果大于超速阈值,则说明该车超速异常;如果低于低速阈值,则说明该车低速异常。
3 实验分析
基于HighD[19]数据集中的一个场景做验证。该场景由双向6车道构成,车辆的轨迹点通过无人机获取。原始轨迹共1 047条,去除不完整轨迹和换道轨迹后剩余818条。图2为轨迹的提取与处理过程,其中图2(b)显示了压缩前后的轨迹对比图,压缩前共有32个蓝色轨迹点,压缩后只有6个红色特征点。

图2 轨迹的提取与处理
预处理后的轨迹经过hausdorff距离计算出轨迹的相似度矩阵后利用谱聚类算法学习出轨迹的空间分布模式,图3是轨迹的空间聚类结果。
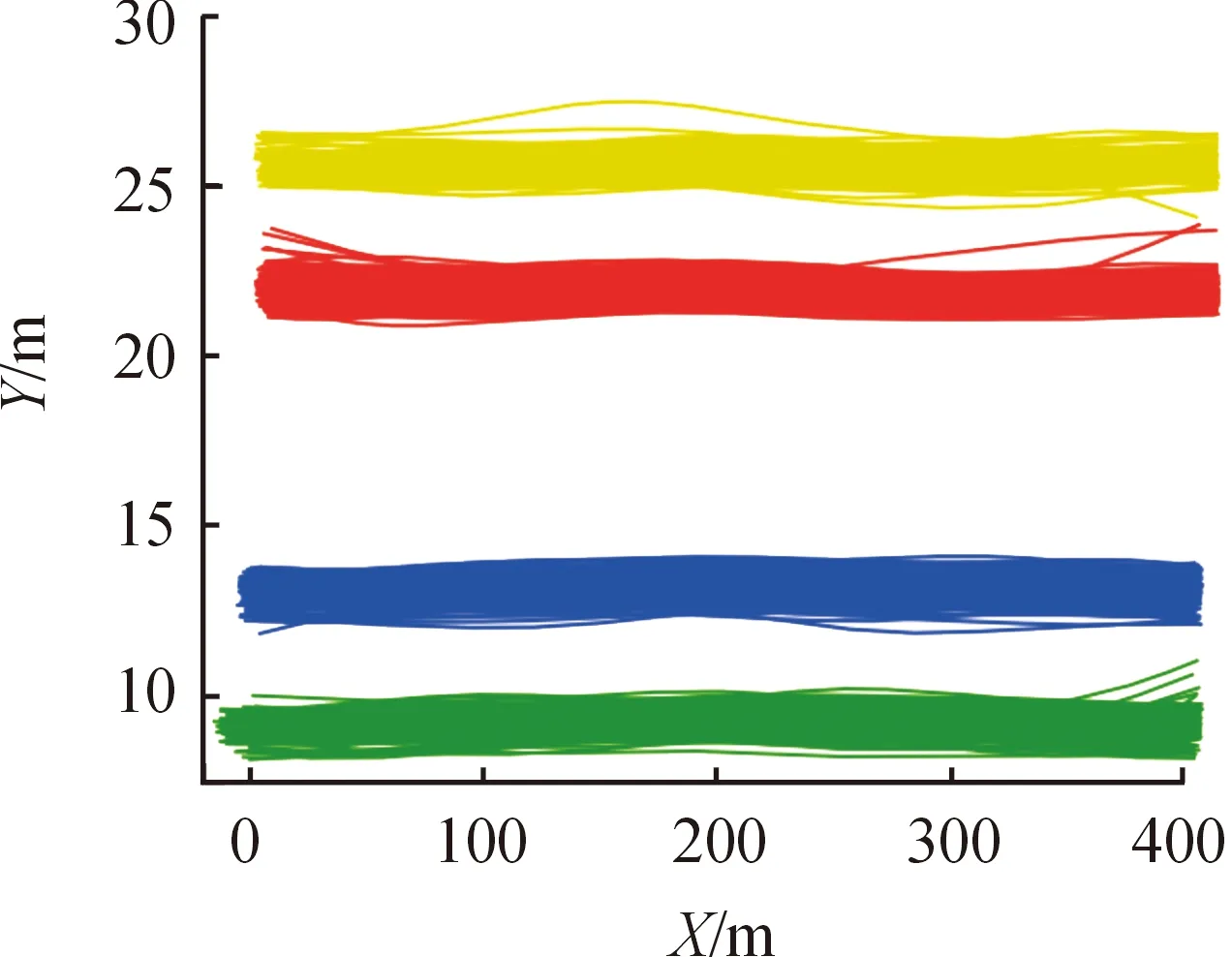
图3 轨迹空间模式学习
通过空间模式学习表明:轨迹的4种运动模式正好对应道路上4条车道,分别是第2条车道(黄)、第3条车道(红)、第5条车道(蓝)和第6条车道(绿)。然后对轨迹进行方向模式学习,图4为方向模式学习结果。

图4 方向模式学习
图中的曲线代表每个运动模式的中心轨迹,带箭头的线段表示该曲线的位移向量。2、3车道的运动模式由右向左,5、6车道的运动模式由左向右。对于逆行轨迹,相邻轨迹点之间位移向量和所在的运动模式的方向向量的夹角余弦小于0且无限接近-1。对于正常行驶车辆的轨迹,其相邻轨迹点之间的位移向量与所在模式的方向向量的夹角余弦接近1。图5表示正常轨迹相邻点之间位移向量与所在模式方向向量的夹角余弦。

图5 正常轨迹夹角余弦图
图5横坐标代表的是轨迹点,纵坐标表示相邻轨迹点之间的夹角余弦,例如第1个柱状图代表第1个点和第2个点的方向向量与所在空间模式方向向量的夹角余弦。通过计算相邻轨迹点之间的方向向量与所在模式的方向向量的夹角余弦,就可以判定车辆是否逆行,只要存在夹角余弦小于0的情况,就可以判断车辆发生逆行,可以有效地检测出逆行行为。表1为样本轨迹空间匹配结果。

表1 轨迹空间匹配
由表1可知,所有轨迹点到车道2中心轨迹的距离最短,所以该轨迹属于2车道。然后再对其进行方向模式匹配,匹配结果如图6所示。

图6 逆行轨迹夹角余弦图
由图6可知,该轨迹相邻两点之间的方向向量与所在空间模式的方向向量的夹角余弦都小于0且接近-1,该轨迹为逆行轨迹。综合空间模式匹配结果可知,该轨迹为2车道逆行轨迹。
对于速度异常的车辆通过轨迹的空间模式学习后,提取出各模式轨迹的速度特征,统计每个模式中各个轨迹的速度变化,就可以确定正常车辆行驶的速度区间。将95%的驾驶员行驶的速度区间作为正常行驶区间,剩下5%作为异常行驶的区间。图7为各车道车型速度分布图。
图7中,红色的曲线代表5%驾驶员行驶的速度异常轨迹,蓝色的曲线代表95%的驾驶员行驶的正常轨迹。由于在现实生活中,超速行驶的驾驶员比低速行驶的驾驶员更为常见,取前1%的驾驶员行驶的速度为低速阈值,后4%的驾驶员行驶的速度为超速阈值。图7(a)中低速异常阈值为79 km/h,超速异常阈值为120 km/h,图7(b)中低速异常阈值为76 km/h,超速异常阈值为131 km/h,图7(c)中低速异常阈值为89 km/h,超速异常阈值为144 km/h,图7(d)中低速异常阈值为82 km/h,超速异常阈值为156 km/h,图7(e)中低速异常阈值为76 km/h,超速异常阈值为132 km/h。图7(f)中低速异常阈值为74 km/h,超速异常阈值为90 km/h。通过以上分析可知:在不同的交通场景下,可以根据海量的历史数据分析出各车道车辆的速度分布区间,确定超速阈值和低速阈值,从而对车辆的速度是否异常进行实时检测。图8为车辆实时速度分析曲线图。

图7 各车道车型速度分布图

图8 车辆实时速度分析
4 结论
根据改进的Hausdorff距离计算轨迹的空间相似度矩阵,利用谱聚类学习轨迹的空间分布模式,提取中心轨迹利用位移向量学习轨迹的方向模式,通过空间模式与方向模式混合匹配解决了道路中异常车辆的轨迹辨识问题。速度特征提取考虑了不同类型车辆对速度轨迹的影响,以5%行驶的区间为异常区间,确定了道路中车辆行驶的速度异常阈值。通过数据集证明该方法能够实时有效地辨识出方向异常和速度异常的车辆,对提高交通安全具有重大意义。笔者提出的方法也存在不足,只考虑了车辆类型的影响,在接下来的研究中,将加入天气等环境因素,提升识别效果。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
现代电子技术(2022年11期)2022-06-14
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
南京理工大学学报(2022年1期)2022-03-17
汽车实用技术(2022年4期)2022-03-07
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
现代计算机(2021年10期)2021-05-28
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
