矿山胶带运输智能巡检机器人的探索与应用
2022-08-17 09:17陈继勋
电子制作 2022年14期
陈继勋
(兰州石化职业技术大学,甘肃兰州,730207)
0 引言
带式输送机作为煤炭工业中最重要的运输设备之一,其所具有的实际情况,直接影响着煤矿的生产和安全。在针对矿山开采过程中,所具有的必要安全性进行保障时,其中一个关键性环节就是矿山的安全巡检,在这里面包括的关键性检查内容有电力、作业环境、排水系统以及开采系统等方面及环节。在安全检查领域,不仅要求相关人员在规定的时间内进行相关检查,而且还需要耗费大量的时间和物力实现矿山综合经营,把握最终进行检查的目的。由于大部分矿运输路线长,运输系统复杂,虽然安装了一些安全控制装置,但由于监测点的安装位置有限,安装了安全带监测保护系统和防烟系统,产生了一定的效果,设备可能出现故障,不能对事故做出及时的预防措施;工作人员必须进行地下巡查,但由于相关工作人员在责任心以及专业水平方面欠缺,巡查往往不经检查就进行。如果输送机不工作,不仅会影响公司的生产效率,严重时还会危及工人的安全。同时,使用人工进行巡检的方式存在着诸多问题,如使用人工工作量大且效率低下,同时造成了在人力资源方面的浪费等问题。与此同时,能够实现在劳动强度方面的降低,大幅度提高矿山相关管理水平,从而有助于促使矿山的工作管理模式,朝着数字化、自动化方向不断深入发展,从而在矿山的安全生产方面,发挥着其独特的重要作用。目前,虽然机器人的研究还不成熟,但随着国家“智能化”战略和“安全矿山”战略的实施,对机器人的研究起到了很大的推动作用。
然而,目前供应于煤矿方面应用的智能巡检机器人,尤其是利用胶带运输方向的相关研究,仍然处于不完善不成熟的阶段。但由于现在在人力方面的成本持续增长的现实,国家不断推出相关战略方针政策,对这一方面的研究,以及在矿山方面的实际应用都提出了对应更高层次的要求,在矿山作业现场的实际应用效果统计,对该类机器人的研究不断完善推动,发挥出其独特的关键性作用。
在此基础上,本文提出了一种带有皮带转换器的通用控制机器人系统,该系统可以实现无人值守和事故预警。通过现场应用,验证了该项目的可行性。现场试验表明,该控制机器人能够实时监控皮带变换器的运行情况,达到“无人监管、无人巡逻”的目的,有效减少了井下控制作业次数。
1 胶带运输智能巡检机器人应用要求及结构组成
■1.1 胶带运输智能巡检机器人工作原理
矿井智能控制机器人是实现数据采集和上传控制功能的主体。本实用新型采用简化设计,结构紧凑,体积小,重量轻,电路设计能够保证固有安全。它还可以确保他能够在煤矿的特殊环境中执行控制功能。由低照度的大型动态摄像机采集的图像可以实时反映输送机的实际工作状态,并随时间检测错误;如果胶带输送机异常,故障部件通常会发出明显的异常声响,可采集声音从而得出结果分析和评估;安装的烟雾探测器通过运输实时监测烟雾浓度,并在首次出现报警值时,发送针对爆炸控制指示器的报警信号;设置的红外温度检测器不与带式输送机接触,而是通过测量其发出的红外辐射强度来计算表面温度,以便快速检测输送机温度并防止事故发生。如果其他环境流量计的参数异常,应同时在本地和远程激活;为了解决移动设备电源不舒适的问题,拖动电缆,机器人本体内部电路采用爆炸性锂电池供电,低能耗设计,并可补充无线流量。
■1.2 智能带式输送机巡检机器人应用要求
由于分析了煤矿井下的基础条件,尤其是处于胶带运输方面的实际工作环境,具有一定的特殊性与复杂性,因此用于此类环境进行巡检工作的智能机器人,需要符合以下描述的条件。
(1)该类机器人所工作的环境,客观条件方面湿度较大,因此需要充分考虑到,湿度可能会机器人在精度以及稳定性等方面造成一定程度上的影响。
(2)矿山的相关工作会涉及到使用大型的机电类设备,在其附近一般具有较强的电磁以及射频等干扰情况,这一点要求该类机器人的系统在设计上,应当具备较强的抗电磁以及射频干扰的能力。
(3)其工作空间在长度方面较大但较为狭小,同时具有许多的起伏转弯,这对该类机器人在其行走方面的速度、最大行走范围距离受到了一定的限制。同时在其爬坡以及转弯半径方面提出全新的较高要求。
(4)同时在矿山生产中的部分特殊环节以及特殊情况,如胶带运输廊道上的相关巡检工作的开展,要求该类机器人,需要更高的智能水平,以及在监控方面的功能更加强大。
(5)该类机器人首先应当确保其安全,因此应当具备在充电时的相关闭锁功能。
(6)该类机器人应当具备针对各类环境的检测分析,客观条件采集以及远程控制和本体自检等相关功能。
(7)该机器人应当通过其远程控制监测平台,该平台应当能够实现在环境以及设备之间的连续移动的智能监测体系,以及在应急火灾发生时的报警与解决处置功能。
■1.3 胶带运输智能巡检机器人结构组成
为了能够更好的实现上述地目标与功能,针对该类机器人,在其系统上的设计应当是以下将会描述到的几个系统的集合[1]。该类智能机器人的具体结构组成如图1 所示。
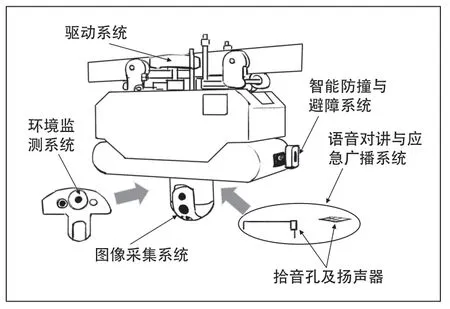
图1 结构组成
1.3.1 驱动系统
由于在矿山的胶带运输廊道内,地形具有较高的复杂性,能够确保机器人在工作时都能实现行走的平稳性,需要具备较好的适应能力。因此,在进行驱动系统的设计工作时,应当在其左右具备压紧机构,同时还有水平以及垂直的旋转机构,这些机构可以全方位保障机器人的稳定巡检功能[2]。具体驱动系统的结构示意图如图2 所示。
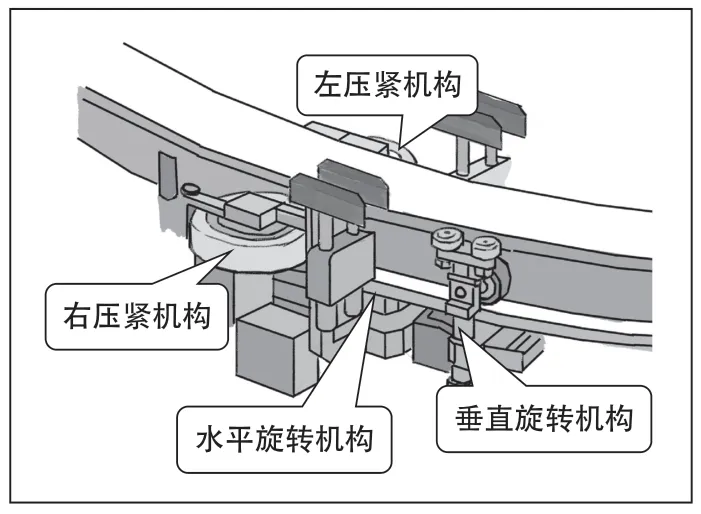
图2 驱动系统结构示意图
1.3.2 图像采集系统
图像采集系统主要是通过对云台搭载的基础,该云台应当具备高度的一体化水平以及高性能表现,能够利用红外热成像以及可见光摄像机,相关图像参数见表1。
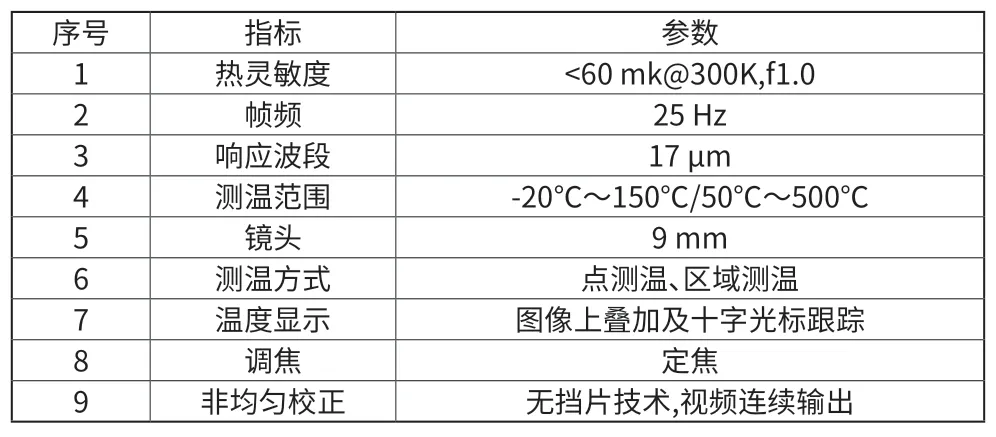
表1 图像采集系统参数表
1.3.3 语音对讲及应急广播系统
该系统主要由多个功能共同构成,能够完成现场与调度室之间,进行必要的交互式交流,以及在紧急状态下的通讯功能。根据相关的应用要求,该系统能够充分完成语音监听操作,其具体范围区间为5~80m2,实际输出阻抗的范围为600~1000 Ω,属于非平衡电阻,在1 m 之外距离40 dB的实际音源情况下,具体信噪比处于85 dB,其能够接收的频率范围区间为20~20 kHz。
1.3.4 环境检测系统
在该机器人进行环境检测部分的系统中,具体应当包括诸多方面。尤其是对于矿山,这类具有特殊性质的作业环境,关键的一项工作就是针对气体的检测。该类机器人进行检测工作能够对气体进行持续性监测,其中包括四种,当其超出一定限度之后,该系统就可进行报警操作。相关气体检测指标见表2。
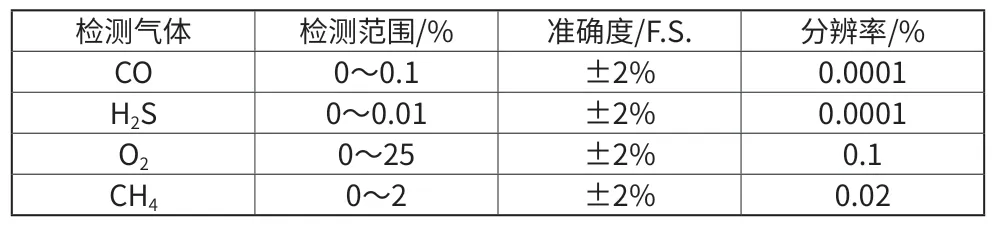
表2 气体检测指标
在进行温度以及湿度的检测时,机器人所能达到的具体测量范围为:温度区间-40℃~+123.8℃,湿度区间0%~100%RH,同时温度的测量的误差范围为±0.5℃,以及湿度的测量的误差范围为±4.5%RH。在进行烟雾检测时,机器人的灵敏度处于0.5 db/m(±0.1 dB/m)。进行光照度检测时的测量范围区间处于0~65535 Lux,同时能够根据所处光照条件场景的不同,进行合理的智能调整操作,具体表现为:在夜间且无月亮照明时,光照测量区间为0.001~0.02 Lux,在夜间有月亮照明时,光照测量区间为0.02~0.3 Lux,在阴天状态下,同时处于室内条件时,测量区间为5~50 Lux,在阴天条件下并处于室外时,测量范围为50~500 Lux,在晴天条件下,并处于室内时,测量区间为100~1000 Lux。另一项重要的巡检工作就是火焰探测,往往选择采用通过对紫外线波长(185~260 nm)进行检测的,相关辐射类型探测器进行火焰检测,实际检测参数见表3。

表3 火焰探测参数指标
1.3.5 智能防撞与避障系统
机器人应当具备在防撞与避障的智能化功能体系,和相关操作系统作为机器人长期稳定运行的重要组成部分。该系统可以不间断地检测隧道内的障碍物和人员,同时可以针对实际物体进行精确定位,实现从而实现该系统的主要功能,一旦检测到出现障碍,机器人能够进行自动停止并开启报警操作。该系统同时对断电期间的制动功能进行了设置,当该机器人在实际运行工作过程中,如果突发故障导致断电现象的发生,该机器人的移动等可以实现立即停止,从而有效对其进行保护[3]。
2 胶带运输智能巡检机器人现场应用及效果
■2.1 胶带运输智能巡检机器人现场应用
通过在矿山实地现场进行的工业性试验中可以看出,该类机器人能够很好地满足胶带运输在运输安全方面的监控工作实际需求,具有稳定可靠的实际监测性能,具有极高强度的故障识别与判断能力,能够及时有效地进行报警操作,且所传达信息精确有效。该类机器人还在管理层面,创新性地实现了直观可视化。通过对胶带运输的管理系统进行对应建设,实现了以上所描述的各项功能体系。
该类机器人也可在操作界面进行监控的实时性选择,以及针对历史数据和相关参数的具体设置,最终能够对该类巡检机器人,实现了对胶带运输过程的远程控制、在线监控和远程操作,并结合现场检测过程和功能,建立了胶带运输通道无人检测与管理一体化的全新模式。
■2.2 智能带式输送机巡检机器人应用效果
机器人可以合理高效收集声音,机器人本体上同时具备高清晰度的拾音器和高分贝的扬声器,可以理解机器人本体与远程控制终端之间的半双工通信,并在工作状态下现场采集声音,并具有设备异常的声音识别功能,在发生故障时,设备可通过传输系统和控制系统之间的远程控制和本地紧急制动接口快速悬挂;还可以制定各种应急程序,以自动根据可能特殊情况发送警报和传输命令;并将因断电造成的损失降至最低水平。
该机器人将不同的传感器组合在一起,并收集来自不同传感器的信号,这些信号以计算机网络的形式提供和上传。无线传输将使其能够克服空间和距离限制,节省电缆安装工作并降低施工成本。
胶带运输方面的智能巡检机器人,在其自动化程度以及故障处理的速度与效率方面都实现了提升,从而使得工作人员的劳动强度大大降低,减少了由于事故发生所造成的损失,在技术经济相关效益方面表现得更为良好。在确保了生产安全与稳定的基础之上,该类机器人还实现了利用自动化模式,从而能够达到减弱人的作用的目标。
3 结语
该类机器人能够综合使用各种传感器,针对矿山作业客观环境,以及设备等方面所产生的基础数据进行收集统计,并将集团大数据分析的高层次优势,最大程度发挥出来。利用相关大数据算法,能够对设备运行状态进行具体判断与及时掌握,实现了设备的实际性能最大化利用,提高在效率以及准确性层面大大提高。另外该类机器人在矿山生产中的应用,是对“自动化减人”的一种典型的表现形式,降低了在人工方面的成本,使得整体生产中的自动化程度,以及故障处理工作的效率显著提高。
猜你喜欢
物流技术(2022年7期)2022-08-01
神剑(2021年3期)2021-08-14
科技创新导报(2021年33期)2021-04-17
阳光(2020年6期)2020-06-01
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
学苑创造·B版(2019年8期)2019-08-09
幼儿教育·父母孩子版(2017年5期)2017-06-19
中国高新技术企业(2015年32期)2015-09-01
中学科技(2015年2期)2015-04-28