
脉冲路面下电动汽车主动悬架状态反馈H∞控制
2022-09-02 04:21李杰贾长旺成林海赵旗
湖南大学学报(自然科学版) 2022年8期
李杰,贾长旺,成林海,赵旗
(吉林大学汽车仿真与控制国家重点实验室,吉林长春 130025)
与集中式电动汽车相比,轮毂电机电动汽车简化了传动结构,驱动响应快、驱动控制精确和各个车轮独立可控,是底盘优化和控制的理想载体[1-3].然而,轮毂电机也带来平顺性负效应问题[4-6].
针对轮毂电机平顺性负效应问题,已经提出了多种改善方法,涉及轮毂电机轻量化、悬架优化、动力吸振器应用、悬架控制等方面.轮毂电机轻量化是从电机设计方面考虑电机减振[7],可以减轻非簧载质量,但是难以改变安装电机后汽车发生的变化.悬架优化是通过关键参数优化和结构改进减轻轮毂电机带来的平顺性负效应[6,8],只能针对特定的路面和车速实现优化,无法全面适应路面和车速的各种变化.动力吸振器可以减少轮毂电机的振动[9],但会产生在车轮内布置困难和结构复杂化的问题.悬架控制主要围绕悬架控制策略设计和执行器开发等展开,轮毂电机电动汽车可以采用PID[10]、模糊[11]、天棚[12]、地棚[13]、天棚地棚混合[13]、最优[14]和H∞[15]等控制策略,目前主要针对单轮实现悬架控制,缺乏考虑前后车轮和空间车轮悬架控制的研究,也没有考虑电机偏心的影响.悬架控制执行器开发是通过半主动悬架[16]和主动悬架[17]实现的,半主动悬架执行器目前主要采用磁流变阻尼器[11],通过控制阻尼力实现,需要外部能量较少;主动悬架主要包括电磁执行器[13]和液压执行器[15],一般通过输入电能产生主动力,需要外部能量较大.
作为改善轮毂电机平顺性负效应的一种有力措施,主动悬架具有控制更好的优点.然而,主动悬架应用需要解决内部不确定性和外部干扰影响的鲁棒控制问题[18],轮毂电机电动汽车主动悬架鲁棒控制,即H∞控制的研究还有待深入开展.
当汽车在道路上行驶时,会遇到脉冲路面,如道路上的凸起或减速带等障碍.虽然脉冲路面的作用时间较短,但会使汽车振动突然加大,立刻降低乘员舒适性,还会对车辆零部件和运载货物造成损伤或破坏.以往的研究较少考虑脉冲路面对轮毂电机电动汽车平顺性的影响,针对轮毂电机电动汽车脉冲路面平顺性开展研究,将使轮毂电机电动汽车平顺性的研究更加全面.
本文研究轮毂电机电动汽车状态反馈H∞控制问题,考虑脉冲路面和轮毂电机实现脉冲路面主动悬架和被动悬架的平顺性对比分析.
1 轮毂电机电动汽车振动模型
1.1 脉冲路面车轮激励
GB∕T 4970—2009 规定[19],脉冲路面车轮激励由三角形凸块确定.脉冲路面前轮激励qf(t)为:
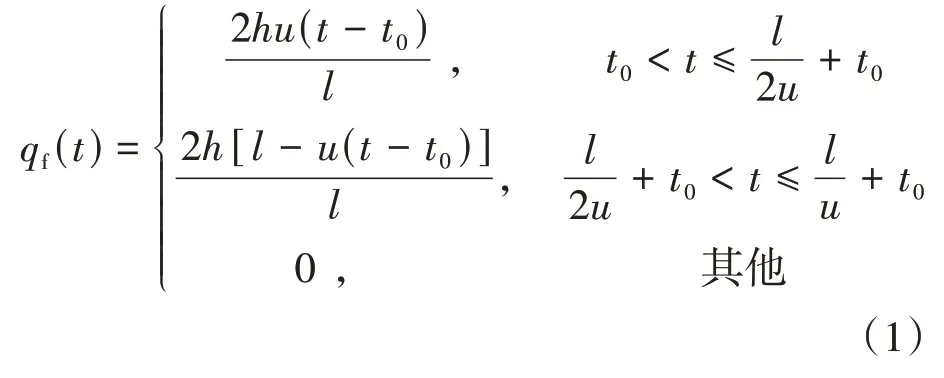
式中:u为车速;h为凸块高度;l为凸块长度;t0为汽车以车速u行驶时前轮到达凸块的时间.脉冲路面后轮激励qr(t)为:

式中:L为车辆轴距;td为后轮滞后前轮的时间.
1.2 轮毂电机激励
选取典型的四相8∕6 极开关磁阻电机作为轮毂电机,其垂向激励为单相转子垂向激励之和[13,20],即

式中:Fv为电机垂向激励;Fvj分别为6 个单相转子a、b、c、a′、b′和c′的垂向激励.

1.3 车辆模型
以往研究轮毂电机电动汽车平顺性,多采用汽车二自由度振动单轮模型,具有可以揭示基本概念、基本性能和分析简单明确等优点.然而,二自由度振动单轮模型反映的是汽车一个角的作用,即单个车轮及其上面部分簧载质量的作用,只能用于研究簧载质量和车轴非簧载质量的垂直振动,无法反映簧载质量同时存在的垂直振动和俯仰振动以及两种运动对平顺性的影响,与汽车实际存在差距.而汽车四自由度振动平面模型既能反映车身质量的垂直振动和俯仰振动,也能反映前轴和后轴的非簧载质量的垂直振动,是研究轮毂电机电动汽车平顺性更合适的模型[21].
基于上述分析,建立包含轮毂电机的电动汽车四自由度振动平面模型,如图1所示.

图1 电动汽车四自由度振动平面模型Fig.1 Four degree-of-freedom vibration plane model of electric vehicle
在图1 中,ms和IsL分别为簧载质量和簧载俯仰转动惯量;muf和mur分别为包含电机质量的前轴和后轴的非簧载质量;csf和csr分别为前轴和后轴的悬架阻尼;ksf和ksr分别为前轴和后轴的悬架刚度;ktf和ktr分别为前轴和后轴的轮胎刚度;Lf和Lr分别为簧载质量质心与前轴和后轴的距离;Fvf和Fvr分别为前轴和后轴的电机垂向激励;Faf和Far分别为前轴和后轴的悬架控制力;zs和φs分别为簧载质量的垂向位移和俯仰角位移;zsf和zsr分别为前轴和后轴的悬架与簧载质量连接点垂向位移;zuf和zur分别为前轴和后轴的非簧载质量垂向位移.
1.4 微分方程
针对zsf、zsr、zuf和zur,由Lagrange 方程建立4 个自由度的微分方程如下:

1.5 状态方程

由可控性定理[18],上述状态方程可以实现主动悬架控制.此外,当u(t)=0 时,上述状态方程也适用于考虑被动悬架的轮毂电机电动汽车.
2 约束状态反馈H∞控制方法
2.1 线性矩阵不等式及其求解
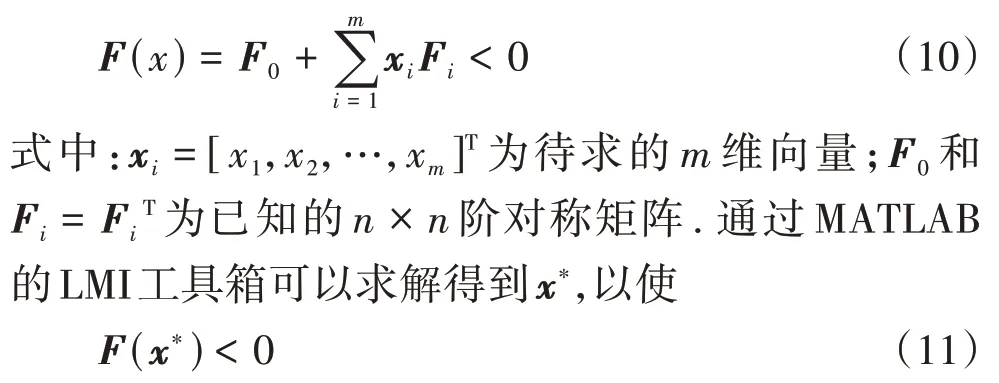
线性矩阵不等式F(x) <0,表示对于任意n维非零向量u,uTF(x)u<0.F(x)的具体表示如下:
成立,或者无解.
2.2 约束状态反馈H∞控制
考虑如下表示:

式中:zu(t)为e维控制输出向量;z(t)为f维约束输出向量,受到max|z(t)|2<的约束限制;C1、D1、C2和D2为相应的矩阵.状态反馈控制方程为:

式中:K为状态反馈增益矩阵.
约束状态反馈H∞控制问题,可以描述为:对于给定常数γ>0,求使得闭环系统稳定的状态反馈控制方程.对应式(12)第一个方程和第二个方程,有

对应式(12)第三个方程的约束max|z(t)|2<由Schur补定理[18],可以推导出

式中:Q=P-1;N=KQ;ρ=γ2wmax;wmax=maxw(t).
通过式(14)和式(15),约束状态反馈H∞控制问题转化为线性矩阵不等式求解问题.在已知A、B1、B2、C1、D1、C2、D2和γ的条件下,其求解过程为:首先,求解式(14)和式(15)表示的线性矩阵不等式得到Q和N;其次,由Q和N确定K=NQ-1,将u(t)=Kx(t)代入式(12)第一个方程求解,得到约束状态反馈H∞控制的状态向量x(t);最后,由式(12)后两个方程得到控制输出向量zu(t)和约束输出向量z(t).
应当说明的是,式(15)是对应于一个约束输出向量z(t)的线性矩阵不等式;当存在多个约束输出向量时,需要依次列出对应于多个约束输出向量的线性矩阵不等式.
3 主动悬架状态反馈H∞控制设计
3.1 控制输出向量

3.2 约束输出向量
前悬架和后悬架的动行程超过其最大值z1max和z2max时,悬架就会撞击限位块而产生振动和噪声.为了避免这种现象,需要

汽车行驶时,只有当车轮动载荷小于车轮静载荷时,才能始终保持车轮接地性和车辆稳定性,即

设z2(t)=[zsf-zuf,zsr-zur,zuf-qf,zur-qr]T,联立式(17)和式(18),得到对应于悬架动行程和车轮载荷的约束输出向量:

为了减少控制过程的能量消耗,应当限制悬架控制力在一定范围内[22]

式中:Fafmax和Farmax分别为前悬架和后悬架的最大控制力.
由式(20)得到控制力约束输出向量:

3.3 状态反馈H∞控制策略
联立式(9)、式(16)、式(19)和式(21),轮毂电机电动汽车主动悬架控制问题表示为:

式(22)表示的状态反馈H∞控制问题,可以理解为:在外界扰动向量w(t)存在最大值wmax的情况下,如果Q、N和ρ=wmaxγ2满足如下线性矩阵不等式

则主动悬架的状态反馈H∞控制策略为:

4 应用分析
4.1 状态反馈H∞控制仿真模型
基于上述理论研究结果开发了电动汽车脉冲路面状态反馈H∞控制MATALB∕Simulink 仿真模型,如图2 所示.图2 中,bump 模块用于生成前轮和后轮的脉冲激励;Motor Excitation 模块用于生成前轮和后轮的轮毂电机激励;State Function 模块用于生成状态方程、控制输出向量、约束输出向量的矩阵,以及获得状态反馈增益矩阵;Output Function 用于获得每个车速下各个振动响应量的时间历程和各个振动响应量的绝对值最大值,all_data_bump 模块用于以数据和图形两种形式输出所有结果.仿真时,采用某电动汽车的基本参数,如表1 所示.约束条件设定为:z1max=z2max=0.1m,Fafmax=Farmax=1 500 N.
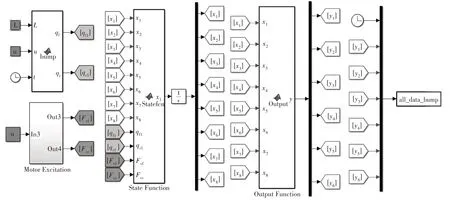
图2 电动汽车脉冲路面状态反馈H∞控制MATALB∕Simulink仿真模型Fig.2 MATALB∕Simulink simulation model of electric vehicle for state feedback H∞control of pulse road
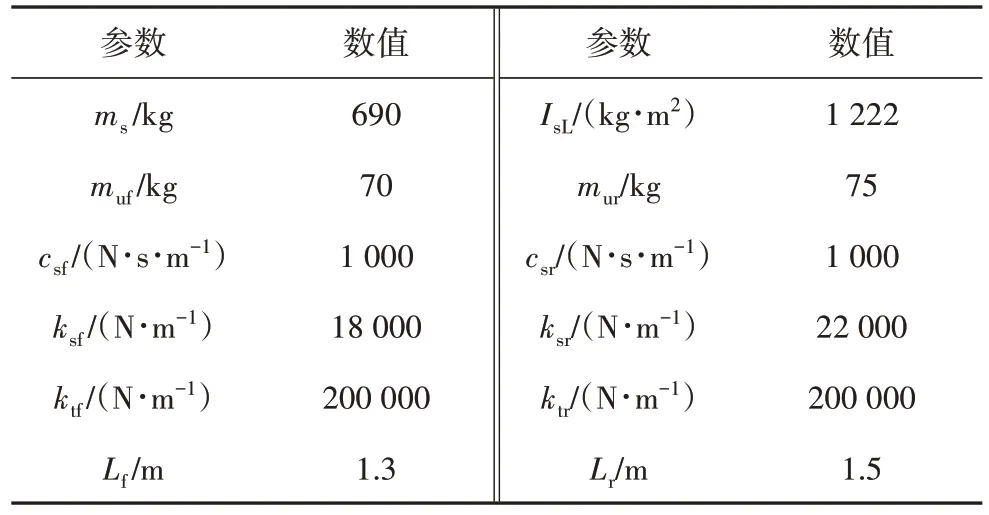
表1 电动汽车基本参数Tab.1 Basic parameters of a electric vehicle
4.2 轮毂电机激励分析
设偏心距e=(R-r)er,er是以百分率表示的偏心率,分别取er=0%、er=10%和er=20%,前者对应于电机无偏心情况,后者对应于2 种电机偏心情况.取某开关磁阻电机参数见文献[13],3 种情况的电机偏心激励如图3所示.
由图3(a)可知,在电机无偏心的情况下,由于电机各处气隙相同,因此电机不存在垂向激励.
由图3(b)和图3(c)可知,当电机转子和定子存在偏心时,由于各处气隙不同,电机产生垂向激励.进一步分析表明,er取10%以上的偏心率,偏心率越大,产生的电机垂向激励越大.

图3 3种情况的轮毂电机激励Fig.3 Three cases of hub motor excitation
由于小偏心率产生的电机垂向激励也小,因此,后续将以偏心率er=10%来研究电机垂向激励与脉冲路面激励共同作用,考察电机偏心在脉冲路面下对电动汽车平顺性的影响.以此能更好地说明电机偏心对汽车平顺性的影响,如果小偏心能产生明显的影响,则大偏心会产生更大的影响.
4.3 振动响应时间历程
在脉冲路面、车速40 km∕h 和前后电机偏心率10%的情况下,求取得到两种悬架的簧载质量垂向加速度、簧载质量俯仰角加速度、前悬架动行程、后悬架动行程、前轮相对动载和后轮相对动载的时间历程,如图4所示.
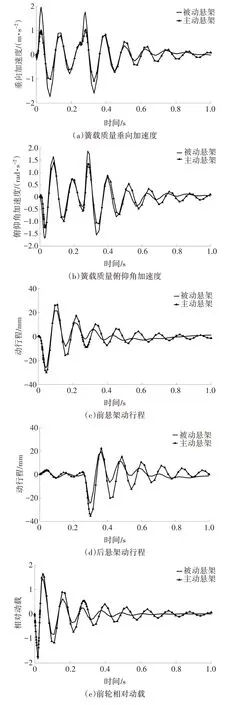

图4 车速40 km∕h和电机同时偏心10%时脉冲路面振动响应的时间历程Fig.4 Time history of pulse road vibration response of suspension with 10%motor eccentricity and 40 km∕h
由图4 可知,主动悬架与被动悬架对比,簧载质量垂向加速度和簧载质量俯仰角加速度最大值得到改善;悬架动行程和车轮相对动载最大值有所增加.
4.4 平顺性评价指标的车速特性
振动响应时间历程用于分析振动响应随着时间变化的过程,而平顺性需要一个反映振动响应的整体指标.GB∕T 4970—2009 规定,采用振动响应时间历程的绝对值最大值作为脉冲路面平顺性评价指标,并且通过其与车速的关系评价汽车平顺性.
取最低车速10 km∕h、车速增量2 km∕h 和最高60 km∕h,在脉冲路面上仿真1 s,设定4 种悬架情况:1)无偏心被动,对应于前后电机无偏心的被动悬架;2)无偏心主动,对应于前后电机无偏心的主动悬架;3)偏心被动,对应于前后电机偏心10%的被动悬架;4)偏心主动,对应于前后电机偏心10%的主动悬架.
针对1 种情况,首先,求解得到1 个车速对应的振动响应时间历程;其次,求解得到该车速对应的振动响应绝对值最大值;再次,求解得到各个车速对应的振动响应的绝对值最大值;最后,求解得到4 种情况的全部结果,如图5所示.
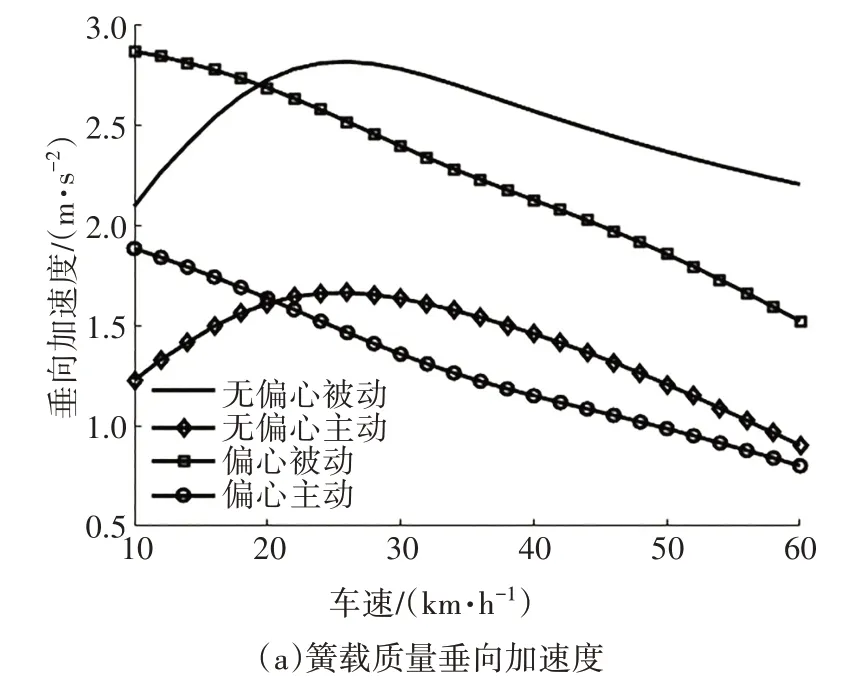


图5 4种情况的脉冲路面平顺性评价指标Fig.5 Evaluation indexes of pulse road ride comfort under four conditions
由图5 可知,当电机无偏心时,主动悬架与被动悬架对比结果如下:1)簧载质量垂向加速度对比改善44.11%,平均改善1.132 9 m∕s2;2)簧载质量俯仰角加速度对比改善28.50%,平均改善0.622 rad∕s2;3)前悬架动行程对比增加0.09%,平均增加3.06 mm,后悬架动行程对比增加0.07%,平均增加1.99 mm;4)前轮相对动载对比增加7.77%,平均增加0.133 3,后悬架相对动载对比增加5.09%,平均增加0.081 0.当电机偏心10%时,主动悬架与被动悬架对比结果如下:1)簧载质量垂向加速度对比改善42.82%,平均改善0.969 6 m∕s2;2)簧载质量俯仰角加速度对比改善22.41%,平均改善0.449 9 rad∕s2;3)前悬架动行程对比增加14.72%,平均增加4.596 5 mm;后悬架动行程对比增加17.22%,平均增加4.402 5 mm;4)前轮相对动载对比增加14.72%,平均增加0.119 9;后轮相对动载对比增加14.72%,平均增加0.118 4.
5 结论
1)考虑脉冲路面激励和轮毂电机激励,建立了轮毂电机电动汽车四自由度振动平面模型,既可以用于分析主动悬架的控制效果,也可以分析被动悬架的作用,适用于研究各种控制方法.
2)总结和说明了可以应用MATLAB 工具箱LMI求解的状态反馈H∞控制问题,实现了轮毂电机电动汽车悬架状态反馈H∞控制设计,开发了相应的MATLAB∕Simulink 仿真模型,通过参数设置可以研究单独脉冲路面车轮激励作用、单独电机激励作用、脉冲路面车轮和电机两种激励共同作用的效果.
3)在脉冲路面上,轮毂电机电动汽车主动悬架H∞控制改善了簧载质量垂向加速度和簧载质量俯仰角加速度,增加了前悬架动行程、后悬架动行程、前轮相对动载和后轮相对动载,增加程度都在约束范围内;电机无偏心和偏心的主动悬架对比说明,偏心影响了主动悬架的改善能力,主动悬架设计需要考虑电机偏心情况.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车工程师(2021年12期)2022-01-17
今日农业(2021年11期)2021-11-27
汽车实用技术(2021年3期)2021-02-24
故事作文·高年级(2018年8期)2018-08-14
快乐语文(2018年7期)2018-05-25
小说月刊(2015年9期)2015-04-23
汽车与驾驶维修(汽车版)(2015年8期)2015-03-25
人生十六七(2015年5期)2015-02-28
汽车与新动力(2012年5期)2012-03-25
