
基于改进蝙蝠算法的快递无人机协同航迹规划研究*
2022-09-02 08:35王秀红刘津源韩光平韩心雨朱格璐
科技创新与生产力 2022年7期
王秀红,刘津源,韩光平,韩心雨,朱格璐
(1.郑州航空工业管理学院管理工程学院,河南 郑州 450015;2.郑州航空工业管理学院航空工程学院,河南 郑州 450015;3.南京航空航天大学经济管理学院,江苏 南京 211106)
新冠疫情后,采用快递无人机进行无接触配送受到广泛关注。由于无人机在航行过程中会遇到诸如天气的变化、鸟群的撞击等突发威胁产生坠毁事故,特别是多机同时飞行时碰撞的概率显著增加。因此,设计航迹规划对无人机安全高效到达目的地尤为重要。
蚁群算法[1]是最常用的航迹规划算法,但因蚁群算法随机因素太多,而传统蝙蝠算法又容易陷入局部收敛,因此,一些学者提出采用蝙蝠等进化算法对无人机航迹进行优化。史利杰等[2]设计一种混沌脉冲发射率的改进蝙蝠算法。杜健健等[3]在初始蝙蝠算法的基础上设置了惯性权重,用来增强蝙蝠算法的全局搜索能力和收敛性能。高超[4]利用最速下降法和莱维飞行来克服蝙蝠算法在搜索能力上的缺陷与避免蝙蝠算法陷入局部最优。
1 无人机航迹规划模型
因为受到无人机自身约束、空间环境约束和其他突发威胁约束的影响,无人机航迹规划需要在以上约束条件下寻找到一条最优路径,以便于无人机的航迹代价最小。一般情况下,能规避所有威胁的最短路径就是无人机的最优路径。
1.1 无人机参数性能约束
包括最大转弯角、最大航行距离、航行速度的限制和飞行高度4 个方面。飞行高度分为最低和最高飞行高度,无人机由于自身性能存在一个最高的航行高度,同时为了避免与地形相撞需要有一个最低航行高度的限制。当α 最大转弯角为αmax;L 为无人机总航程;Lmax为最大航行距离;Hmin为最低飞行高度;h 为平均飞行高度;Hmax为最高飞行高度;Vmin为最小航行速度;v 为平均航行速度;Vmax为最大航行速度。则该自身性能约束条件为

1.2 无人机环境威胁
无人机在航行过程中,地形结构复杂多变,容易发生碰撞。如果无人机的航行高度超过地形威胁中的高度,则其不受到地形威胁的影响。假设无人机航行高度小于地形威胁的高度且无人机在地形威胁水平危险区内飞行,则地形威胁程度与无人机当前位置到同一高度威胁边缘的水平直线距离d 成反比,则无人机在威胁区内飞行发生危险的概率为

2 三维空间环境建模
栅格图法[5]是航迹规划中常用的环境模型构造方法。其基本思想是将外部环境划分为若干个大小相同的单元,选取三维复杂山地环境作为无人机航迹规划空间。设置三维空间的长宽高分别为50 km,50 km 和50 hm,首先建立基准地形模型[6],其公式为

式中:z1为各个地形对应的水平面高度值;x,y 为环境模型中各个地形对应的水平面点坐标;a,b,c,d,e,f,g 为常系数用来控制地形的样貌,作为无人机在航行过中的基本地形起伏样貌。建立山峰模型,将地形威胁和低空探测雷达威胁等价为山峰模型,其公式为

式中:z2(x, y)为该点处的高度值;n 表示威胁的总个数;hi为威胁的高度参数,用来控制威胁的具体高度;xi,yi分别为第i 个山峰在水平面中的中点坐标;xsi,ysi分别为用来控制威胁坡度的衰减量。将外部威胁转化为三维空间内的山峰,如设定威胁在三维空间内的数据见表1。最后得出三维空间规划图见图1。

表1 规划空间内外部威胁分布表

图1 航迹规划三维数字地图
3 改进的蝙蝠算法
蝙蝠算法[7]模拟了蝙蝠利用回声定位机制来觅食的过程,该算法控制参数少,在求解复杂优化问题时具有良好的全局搜索能力。但存在收敛速度慢、收敛精度低、易陷入局部最优等缺点。本文引入惯性权重和高斯扰动,得到了一种改进的蝙蝠算法,用于解决无人机协同航行的约束优化问题。
首先,在速度里设置惯性权重ω0来提高算法的收敛精度。ω0与迭代次数呈反比关系[8],按式(5) 确定,其中,c2为调节参数;ωs,ωe分别为初始和最大迭代次数后的惯性取值。
其次,在蝙蝠原来位置上加一个服从高斯分布的扰动项mδi,δi的每个分量都服从N(0,1),其中m 为常数,表示高斯扰动的权重[9],目的是防止算法过早收敛,提高算法全局搜索性能。
4 无人机协同航迹规划仿真
假定无人机最大转弯角100°,最大航行距离150 km,最低/最高航行高度5 hm/40 hm,最小航行速度20 km/h,最大航行速度120 km/h。在蝙蝠算法中,设置种群大小为100,维度为10,最大脉冲率0.8,脉冲响度系数0.1,脉冲发射率系数0.85。改进算法中设置ωs为0.2,ωe为0.9,c2为1,高斯扰动系数为0.01。设置无人机飞行器起点为(3,45,10),终点为(45,3,10),并分别使用初始蝙蝠算法和改进后蝙蝠算法来进行航迹规划仿真,迭代次数100,得到图2 和第50 页图3 的初始蝙蝠算法航迹规划图和第50 页图4 和图5 的改进后蝙蝠算法航迹规划图。其中,北方向为y 轴,东方向为x 轴。
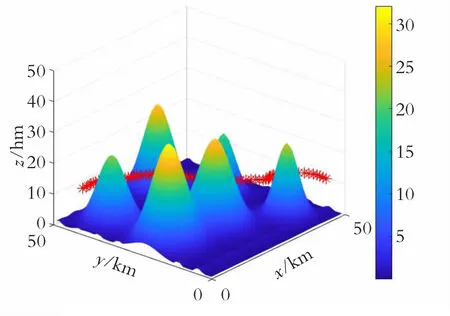
图2 初始蝙蝠算法航迹规划3D 图
由图2 和图3 可知,在利用初始蝙蝠算法进行单无人机的航迹规划过程中,无人机在障碍物1 的山脚出发,选择从左侧绕过障碍物1 之后又绕一个半圆形的大圈,然后沿着障碍物5 边缘向着终点前进,在遇到障碍物4 后,选择绕行障碍物4 后到达终点,无人机在障碍物1 处的航迹路线显然是不合适的,因此增加了无人机航行的时间与距离。种群迭代100 次后,此次航迹规划的路径长为106 km。

图3 初始蝙蝠算法航迹规划俯视图
由图4 和图5 可知,在利用改进后蝙蝠算法进行单无人机的航迹规划过程中,无人机从起点不断搜索最优路径到达终点。路程中间途径障碍物1,与初始蝙蝠算法的选择不同,无人机选择从障碍物1 的右侧绕行,减少了无人机航行的距离与时间。然后,无人机绕行障碍物6 并贴着障碍物6 前进,最后选择绕行障碍物4 后到达终点。种群迭代100次后,此次航迹规划的路径长为98 km。
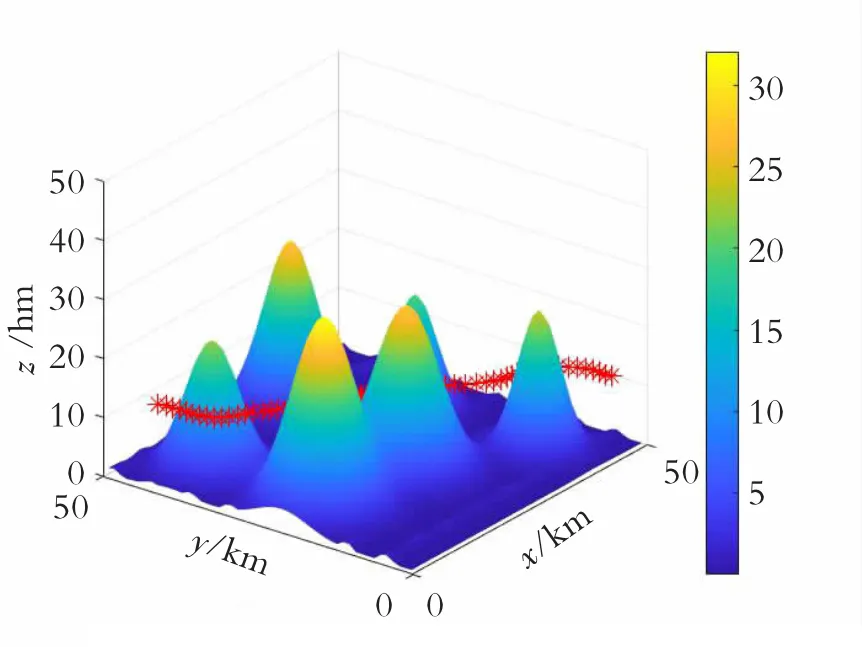
图4 改进后蝙蝠算法航迹规划3D 图

图5 改进后蝙蝠算法航迹规划俯视图
由以上仿真模拟可知,初始蝙蝠算法与改进后蝙蝠算法的比较见表2。
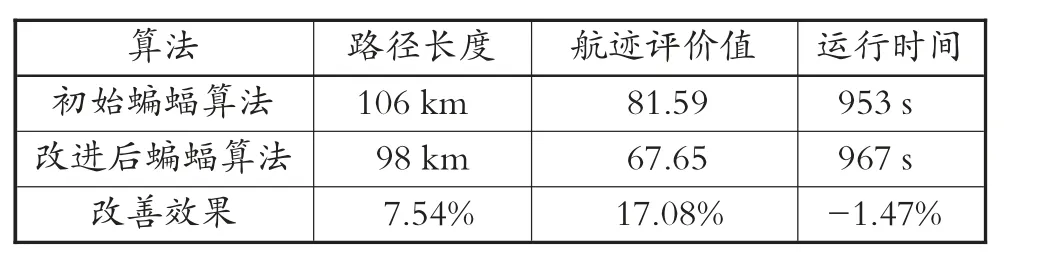
表2 初始蝙蝠算法与改进后蝙蝠算法对比表
综上所述,初始蝙蝠算法具有容易陷入局部最优和收敛速度过快等缺点,而改进后的蝙蝠算法经过模拟仿真后已经没有初始蝙蝠算法的缺点,并且改进后的蝙蝠算法更容易找到最优航迹规划。因此,改进后的蝙蝠算法运行时间过长,仍需要继续改善。
5 结论
以快递无人机为运输手段的快速、无接触配送已成为未来快递行业发展的重要方式,设计合理的运输路线是减少运输成本,规避障碍风险的关键环节。本文利用栅格法构建复杂环境模型,构建包括快递无人机自身性能约束和外部威胁约束的航迹规划模型,在初始蝙蝠算法的基础上,引进了惯性权重和高斯扰动项解决局部收敛的问题,提高搜索效率。仿真实验显示,改进后蝙蝠算法增强了初始蝙蝠算法的全局搜索能力和收敛能力,能够规划出更优秀的航行路线。
猜你喜欢
热带作物学报(2021年1期)2021-02-22
青年歌声(2019年12期)2019-12-17
科技信息·中旬刊(2018年9期)2018-10-21
北京航空航天大学学报(2017年7期)2017-11-24
小溪流(画刊)(2016年12期)2017-02-04
北京航空航天大学学报(2016年6期)2016-11-16
航空模型(2016年5期)2016-07-25
百科探秘·航空航天(2015年12期)2015-11-07
微型小说选刊(2015年5期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
