
基于轮廓匹配的引线键合机视觉定位方法
2022-09-02 08:35康永新靳宇婷
科技创新与生产力 2022年7期
康永新,靳宇婷
(中国电子科技集团公司第二研究所,山西 太原 030024)
1 引线键合机视觉定位系统概述
作为当前信息产业和信息社会的基础,集成电路(Integrated Circuit) 产业已成为国内最受重视的核心产业之一,是支撑国家经济社会发展和保障国家安全的基础性产业[1]。随着芯片集成度的不断提高,芯片封装作为IC工业的关键部分,对其精密度、多引线、精细间距等要求也不断提高[2]。
芯片封装的主要设备之一为引线键合机,全自动引线键合机主要由几大部分组成:视觉定位系统、运动平台控制系统、工作平台等。引线键合机的精度受到多种因素的影响,如焊点定位精度、多轴运动精度等。传统的做法是提高运动平台的精度,以达到提高加工精度的目的,但芯片引线键合机的过程复杂,由多道工序组成,每道工序都会产生随机误差,并且会影响下一道工序,而单纯提高运动平台的精度不能消除每道工序的误差,因此,采用视觉检测的方式纠正所产生的误差,视觉系统对于芯片封装的精度和速度具有重要作用。
国外针对芯片封装设备视觉系统的研究已经很成熟。美国的K&S公司利用高速CCD摄像机和两套光学系统,实现了对焊点的高速定位;Esec公司利用DSP和灰度搜索来实现高速、精确的模式识别。国内对于芯片封装设备的研究在短短几十年内也取得了很多成果。熊振华等人研制了一种能够准确定位焊盘并植入焊球的焊盘视觉识别与定位系统,该系统首先采用霍夫变换获取图像中的特征向量,然后对特征向量进行位置定位,从而完成对焊盘的位置定位[3];汪宏昇等利用图像的小波特征,并在此基础上做了改进,但该算法的精度不能满足某些高精度定位的应用场景[4]。由此可见,提高图像定位精度是引线键合机视觉系统的核心。
2 引线键合机视觉定位方法概述
视觉定位算法的核心在于图像的模板匹配,常用的模板匹配算法有:基于灰度的匹配,基于特征的匹配,基于组件的匹配,基于相关性的匹配以及局部变形的匹配。基于特征的匹配算法通常使用点特征、线特征即轮廓特征和面特征(基于区域、基于纹理等) 的方法,其中,基于轮廓的模板匹配其相似度分布比基于灰度的模板匹配更加有区分度,因而可以进行较高精度的定位,同时,由于只对轮廓进行处理,因而提高了处理速度,因此在处理带有旋转和缩放的情况时具有优势,另外,基于轮廓特征的模板可以不从现场获取而从CAD数据生成。
本文的引线键合机视觉定位过程如下:首先采用CMOS相机与低倍镜头采集芯片图像,并确定芯片的特征区域作为模板匹配的依据特征,对该模板进行亚像素轮廓提取,基于所提取的特征轮廓实现模板匹配。
3 亚像素轮廓提取
数字图像在本质上可以看作是一个连续函数,图像中的边缘可以被视为若干个零散点,在垂直于边缘的方向上,边缘点的灰度梯度值是局部最大的。图像的边缘包含着图像的重要信息,对于引线键合机的定位来说,可以利用图像边缘进行模板的唯一识别与定位,因此,提取图像的边缘对于引线键合机的定位而言至关重要。
针对边缘检测算法的研究有很多,经典的边缘检测算子有:Roberts算子,Sobel算子,Canny算子等,Canny算子是目前边缘检测领域最成熟的算子。但传统的图像边缘检测方法的检测精度最高只能达到一个像素级,对于本文的引线键合机而言,其定位精度需在一个像素级之内,传统的像素级边缘检测方法已经不能满足实际定位的需要,在此基础上,需采用亚像素轮廓提取的方法,提取特征区域的轮廓。
3.1 插值法求亚像素边缘点
目前常用的亚像素级的边缘检测算法有:插值法、矩方法、拟合法等。插值法是利用对像素点的灰度或灰度的梯度插值,以增加灰度信息,但图像中有噪声时,该方法容易受到影响。矩方法是假设实际图像的边缘分布与理想边缘模型灰度矩一致,以此来确定实际边缘;拟合法则是通过拟合假设实际图像的边缘分布,获得亚像素的边缘定位。矩方法和拟合法由于涉及假设实际图像边缘分布模型,因此计算复杂,求解速度慢。本文采用插值法提取亚像素轮廓。
Devernay对Canny算法进行了改进,通过对梯度方向上相邻的三点梯度模值的二次函数插补,计算出新的边缘点[5],计算过程见图1。

图1 边缘点插值示意图
‖g(A,B,C)‖为3个垂直于边缘方向上的梯度模值,Canny算法会选择模值最大的B点作为边缘点。但是,也可能在A和C之间存在η点,在η点处的梯度模值大于B点及AC之间的其他点,此时,η点能更好地表示边缘。为了更好地计算,利用ABC三点来进行二次方程拟合,并求出相对于BC向量的补偿η,公式为

为了消除在非水平和垂直方向上的误差,当点(x,y) 处梯度满足式(2) 时该点为水平方向的边缘点

类似于此,也可确定垂直方向的边缘点。
3.2 边缘点链
通过3.1的方法检测出边缘点,但每个边缘点并不相关,需要将边缘点连成边缘链,从而形成图像轮廓。
被归为同一链路的像素点应具有近似的梯度方向,设有两个像素点A与B,当图像边缘上它们的夹角小于90°时,数学表示为g(A)·g(B)>0。另外,轮廓将图像的亮区域和暗区域分开,所以连续的链路需要将暗区域划分到曲线的同一侧,可通过验证从边缘点A到B的向量与点A两个可能的梯度方向中的一个是否近似正交。当(A)>0时,A→B称为前向链路,反之称为反向链路。
边缘点最多有一个前向链路和后向链路,在确定AB成为边缘链前,要确定A是否有前向链路以及B是否有后向链路。
以图2为例,A,B,C,D四点的距离关系满足:‖A-B‖>‖B-C‖>‖C-D‖,假定链路为A→B→C,B点同时存在A→B和C→B,根据CB距离小于AB,所以A→B会被切断,同样的,由于CD距离小于BC,因此C→B也会被切断,因此只剩下C→D。在假定链路为C→B→A,剩下链路A→B,故最后的结果为A→B和C→D。
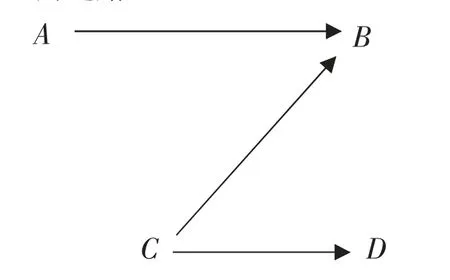
图2 边缘链确定
3.3 亚像素边缘提取实验
为了证明上述亚像素轮廓提取方法的可行性与有效性,现使用Canny算子提取轮廓与亚像素轮廓提取结果进行比对。见第119页图3。
由图3可看出,当图像中线条较为紧密时,Canny算法提取的轮廓相较于真实轮廓较粗,甚至容易叠加到其他图像线条上,而亚像素轮廓的提取结果明显优于Canny算法的提取效果。
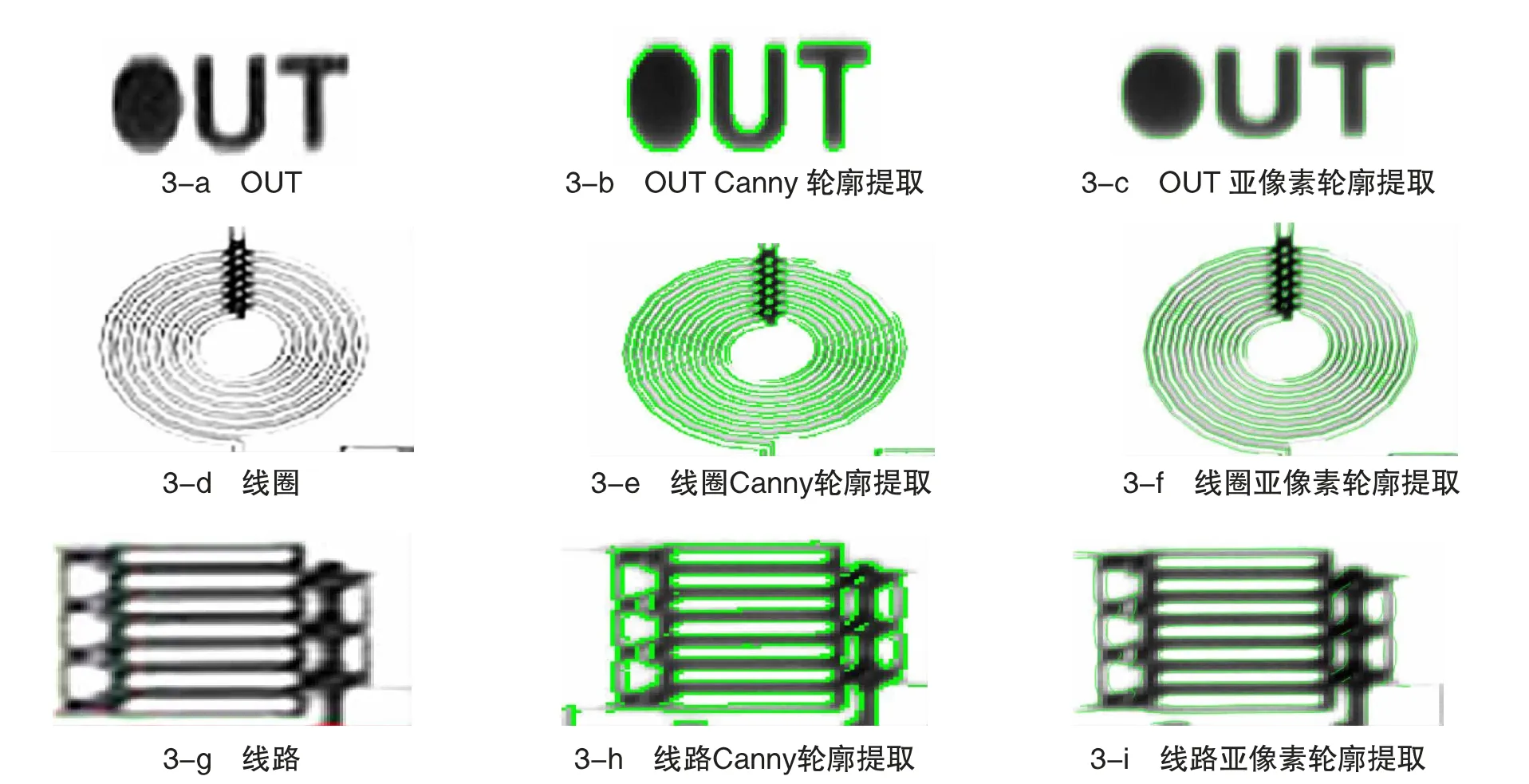
图3 Canny算法轮廓提取与亚像素轮廓提取对比
4 基于轮廓匹配的视觉定位实验
4.1 定位流程
引线键合机的定位关键是找到所选模板在图像中的位置,基于亚像素轮廓提取的定位算法流程见图4。首先,对采集到的图像进行预处理,使其轮廓特征更加明显;其次,创建特征明显的ROI,提取ROI的亚像素轮廓,进行模板创建,选择符合实际情况的角度、缩放比与匹配分值进行模板匹配,输出图像坐标,即完成定位。
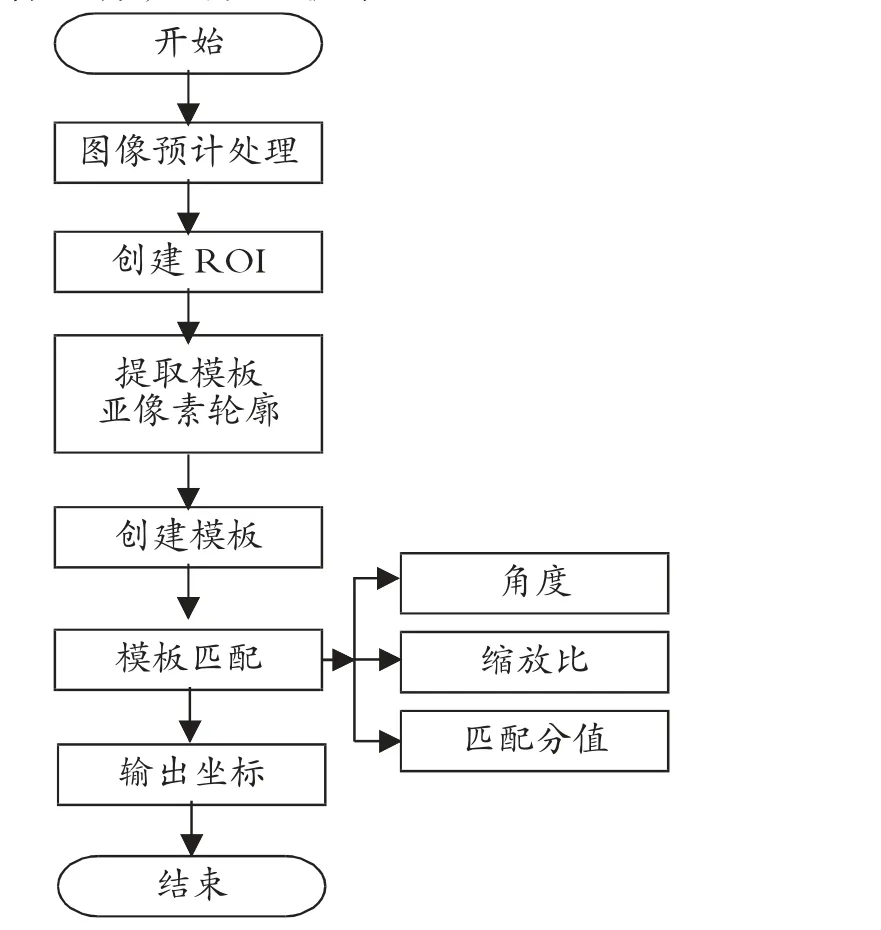
图4 引线键合机视觉系统定位流程
4.2 定位实验
按照上述流程进行引线键合机的视觉系统定位实验,实验结果见图5。
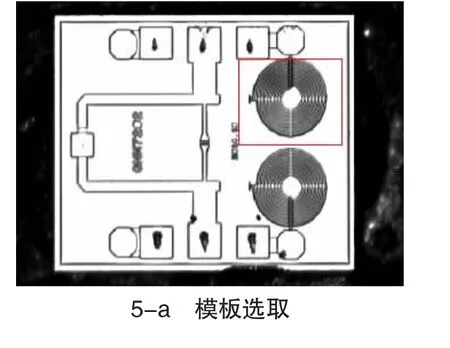
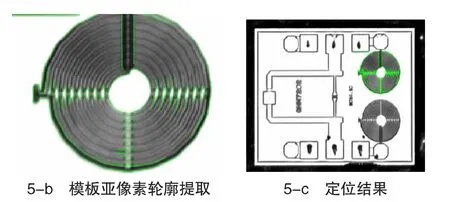
图5 视觉系统定位实验结果
如图5-c所示,本文方法可以利用轮廓精确定位至模板所选位置,由于在实际使用引线键合机的过程中,模板的旋转角度不会超过5°,因此不会匹配到下方线圈,由此可证明本文所提出的定位方法切实可行。
5 结束语
引线键合机精度高,成本相对较低,因此成为芯片互连的主要技术,在未来的一段时间内,引线键合机仍然会是芯片封装技术的主流。随着微电子行业的发展,芯片封装技术也朝着集成度更高、性能更好、引线更多、间距更细化的方向发展,微电子技术是信息化社会的核心竞争力,也是信息化社会的基础产业,优化引线键合机技术,必将推动IC封装行业的发展,也必将推动社会的信息化进程。
猜你喜欢
移动通信(2021年5期)2021-10-25
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年3期)2020-07-24
制造技术与机床(2019年11期)2019-12-04
中国交通信息化(2017年4期)2017-06-06
通信产业报(2016年44期)2017-03-13
中国交通信息化(2014年3期)2014-06-05
自动化与仪表(2014年10期)2014-02-26
舒适广告(2008年9期)2008-09-22
雕塑(1999年2期)1999-06-28
