
基于域适应神经网络与联合分布自适应的无监督故障诊断方法
2022-09-05 07:50李新宇
计算机集成制造系统 2022年8期
张 钊,李新宇,高 亮
(华中科技大学 机械科学与工程学院,湖北 武汉 430000)
0 引言
故障诊断对于机械设备的健康管理十分重要,也是智能制造领域的研究热点之一。目前,常用的故障诊断方法主要有3类[1]:基于模型的方法、基于信号处理的方法和基于数据驱动的方法。由于制造业信息化与数字化的不断进步,基于数据驱动的故障诊断方法已成为了当前的研究热点,该类方法包括贝叶斯网络(Bayes)[2-3]、支持向量机(Support Vector Machine,SVM)[4-5]、人工神经网络(Artificial Neural Network, ANN)[6-9]等。CAI等[10]介绍了近几十年来使用贝叶斯网络进行故障诊断的应用研究;YIN等[11]介绍了基于支持向量机的故障诊断与监测方法的研究现状;ALI等[12]提出了选择最重要固有模式函数(Intrinsic Mode Functions, IMF)的数学分析方法,将所选特征用于人工神经网络的训练,完成对轴承缺陷的分类任务。
上述基于数据驱动的故障诊断方法一般采用传统机器学习方法,它们大部分建立在训练数据与测试数据分布相同的假设上。然而,当训练数据与测试数据的数据分布不同时,传统机器学习方法往往表现不佳[13]。实际生产过程中,机械设备的工作状态与条件往往是动态变化的,设备所产生的故障诊断数据分布也会随之改变。另外,在故障诊断中,高质量的带标签的数据通常较少,这给故障诊断带来了较大的挑战。
为了解决故障诊断数据不足的问题,无监督的故障诊断方法受到了广泛关注,LIU等[14]提出一种分类对抗自编码器(Categorical Adversarial Autoencoder, CatAAE),用于滚动轴承的无监督故障诊断。该模型通过对抗训练过程训练自动编码器,尝试对数据进行聚类;HE等[15]提出一种基于深度信念网络(Deep Belief Network, DBN)的人工智能方法,用于齿轮传动链的无监督故障诊断,并采用遗传算法对网络的结构参数进行优化;SONG等[16]提出了一种基于迭代多流形谱聚类(Iterative Multi-manifold Spectral Clustering, IMMSC)的无监督故障诊断方法,采用基于局部切线空间构造亲和矩阵的IMMSC来提高多流形分布数据的谱聚类性能;ZHANG等[17]提出一种称为通用归一化稀疏滤波(General Normalized Sparse Filtering, GNSF)的新型无监督学习方法,用于智能故障诊断,该算法通过基于特征矩阵的广义范数优化目标函数,实现了特征稀疏度的度量。以上无监督故障诊断方法大多采用聚类的方法对故障数据进行分析,从而实现无监督,没有针对故障诊断数据分布不同这一类问题进行无监督故障诊断的讨论。
由于大多数无监督故障诊断方法对故障诊断数据分布变化这类问题讨论较少,为了解决机械设备因工作状态变化导致数据分布变化,标签故障数据较少的问题,考虑到迁移学习的主要任务是将一个领域所学习到的知识迁移到另外一个领域中,辅助另外一个领域的模型学习。其中的域适应方法可以解决源域与目标域的数据分布不同的问题。因此,将迁移学习与深度学习结合,可以在获得深度学习模型较好特征表现能力的同时,在一定程度上解决故障诊断中数据分布变化的问题。
基于迁移学习的故障诊断研究也有一些成果,GUO等[18]提出一种由条件识别模块和域自适应模块组成的深度卷积迁移学习网络(Deep Convolutional Transfer Learning Network, DCTLN);YANG等[19]提出一种基于特征的迁移学习网络(Feature-based Transfer Neural Network, FTNN),设计了卷积神经网络模型损失函数的正则化项,以减少数据分布差异;SHEN等[20]提出一种基于迁移学习的轴承故障诊断方法,利用辅助数据来辅助目标域的数据分类;冯毅雄等[21]提出一种集成迁移学习的轴件表面缺陷实时检测方法,建立了高速生产状态下的轴件表面缺陷实时检测模型;LI等[22]提出使用域适应深度自编码器方法来实现故障诊断,首先使用自动编码器结构将不同设备的特征投影到相同的子空间中,然后采用域自适应算法,最大程度地减少来自不同机器的数据之间的分布差异;LU等[23]提出了域自适应性的深度神经网络模型,用于故障诊断,并探索出模型最佳超参数的几种策略。目前,现有的迁移学习与域自适应方法更多倾向于解决加速模型训练、辅助数据分类、学习特征的域不变性的问题,对于如何更好地提取数据的特征与分层次的学习特征的域不变性缺乏讨论。
针对故障诊断中数据分布变化的问题,本文提出了基于域适应的神经网络与联合分布自适应的无监督故障诊断方法,重点解决源域有标签。而目标域没有标签的情况,则考虑通过源域的标签直接将模型迁移至目标域,完成无监督分类任务。将域适应神经网络与联合分布自适应方法相结合,可以很好地在利用好域适应神经网络的深度网络的特征提取与迁移能力的同时,进一步利用联合分布自适应方法的迁移能力,在提取的特征上进行迁移。该方法采用了信号转图像方法,并使用卷积神经网络的方法对诊断数据进行特征提取,分层次地采用了深度迁移学习与传统浅层迁移学习方法,对诊断数据进行了深度与浅层的特征域迁移。在深度网络中,将由深度网络所生成的源域与目标域特征通过最小化最大均值差异(Maximum Mean Discrepancy, MMD)损失,使得两个域的特征分布靠近;在浅层网络中,联合分布自适应方法通过减少源域与目标域的边缘分布与条件分布的差异,达到迁移学习效果。
1 迁移学习算法简介
目前,基于数据驱动的故障诊断方法大部分使用的是传统的机器学习方法。传统机器学习方法是解决训练数据与测试数据的数据分布相同且训练任务和测试任务也相同的问题,但无法解决故障诊断数据分布发生变化的情况;而迁移学习是解决不同数据分布,或者不同学习任务的问题。PAN等[13]总结了迁移学习有3种类型,分别是源域与目标域数据有分布差异、源任务与目标任务有差异或两者兼而有之。而其中域自适应方法[24]作为一种迁移学习,主要解决源域任务与目标域任务相同,源域数据分布与目标域数据分布不同的问题。故障诊断问题中,数据分布变化的诊断数据可以看作是迁移学习中的数据分布不同的源域与目标域,因此域自适应方法就可以解决数据分布变化的故障诊断问题。
在域自适应方法中,有两个域:具有足够标记数据{Xs,Ys}的源域和没有标记数据{Xt}的目标域。根据CSURKA等[25]的观点,深度域适应可以概括为3种情况:基于差异的深度域自适应方法[26]、基于对抗网络的深度域自适应方法[27]和基于重构的深度域自适应方法[28]。
1.1 域适应神经网络方法
域适应神经网络方法由GHIFARY等[29]提出,该方法属于域自适应方法,在给定分别属于不同数据分布的源域Ds={Xs,Ys}与目标域{Xt}下,能够准确地对无标签数据的目标域数据进行分类。该方法采用了一个简单的神经网络模型来处理领域自适应问题。将最大平均差异度量作为源域监督学习中的正则化方法,以减少特征空间中源域和目标域之间的数据分布不匹配性。
所用到的最大平均差异度量是衡量两个样本中概率分布之间差异的方法。给定源域与目标域之间的条件概率分布分别为p与q,则最大平均差异度量(MMD)定义如下:

(1)
式中:X′S和X′T是XS和XT的映射,X′S={x′Si}={∅(xSi)},X′T={x′Ti}={∅(xTi)} ;∅(·)是映射函数,该映射函数主要是将源域与目标域映射至高维希尔伯特空间上,在该空间里,源域与目标域的数据分布差距能够减少。
这种MMD方法在域适应与迁移学习方法中已经被广泛使用,PAN等[30]提出了基于主成分分析(Principal Components Analysis, PCA)模型的迁移成分分析(Transfer Component Analysis, TCA)方法,采用MMD来衡量样本间的差异;CHEN等[31]提出了具有数据分布自适应功能的属性网络嵌入(Attributed Network Embedding with Data Distribution Adaptation, ANEDDA)方法,利用TCA方法来识别通用特征。实验证明该度量函数的确可以有效地度量两个样本分布的情况,减小MMD的方法能够有效地进行迁移学习。
域适应神经网络方法将MMD度量方法作为正则化方法嵌入到有监督的反向传播训练中。 通过这种正则化方法,旨在训练网络参数,从而优化监督准则,使得源域与目标域的隐藏层特征表示数据分布差异减少。其方法的损失函数如下:
JDANN=JNNs+γMMD。
(2)
式中:JNNs表示域适应神经网络中由源域数据训练得到的分类损失;MMD表示源域数据与目标域数据在网络隐藏层特征之间的分布差异;γ为对两个损失之间的权重平衡参数。
1.2 联合分布自适应方法
联合分布自适应方法由LONG等[32]提出。在该方法中,源域Ds={Xs,Ys},目标域Dt={Xt},包括两个假设:①源域和目标域边缘分布不同:Ps(xs)≠Pt(xt);②源域和目标域条件分布不同:Qs(ys|xs)≠Qt(yt|xt) 。联合分布自适应方法的目标就是寻找一个变换A,使经过变换后的边缘分布Ps(ATxs)与Pt(ATxt)、条件分布Ps(ys|ATxs)与Pt(yt|ATxt)同时相近。
首先减小边缘概率分布差异,使得Ps(ATxs)与Pt(ATxt)尽可能相近,同TCA方法一样,仍然采用最大均值化差异MMD距离来衡量两个分布的边缘概率分布差异。其中ns与nt分别表示源域与目标域的样本个数。
(3)
(4)
然后对源域与目标域的条件概率分布进行适配,使得Ps(ys|ATxs)与Pt(yt|ATxt)的距离也尽可能的小。得到总的优化目标为:
(5)
式中:Θ为拉克朗日乘子;H为中心矩阵;I为单位矩阵。
2 基于域适应神经网络与联合分布自适应的故障诊断方法
2.1 方法的整体框架
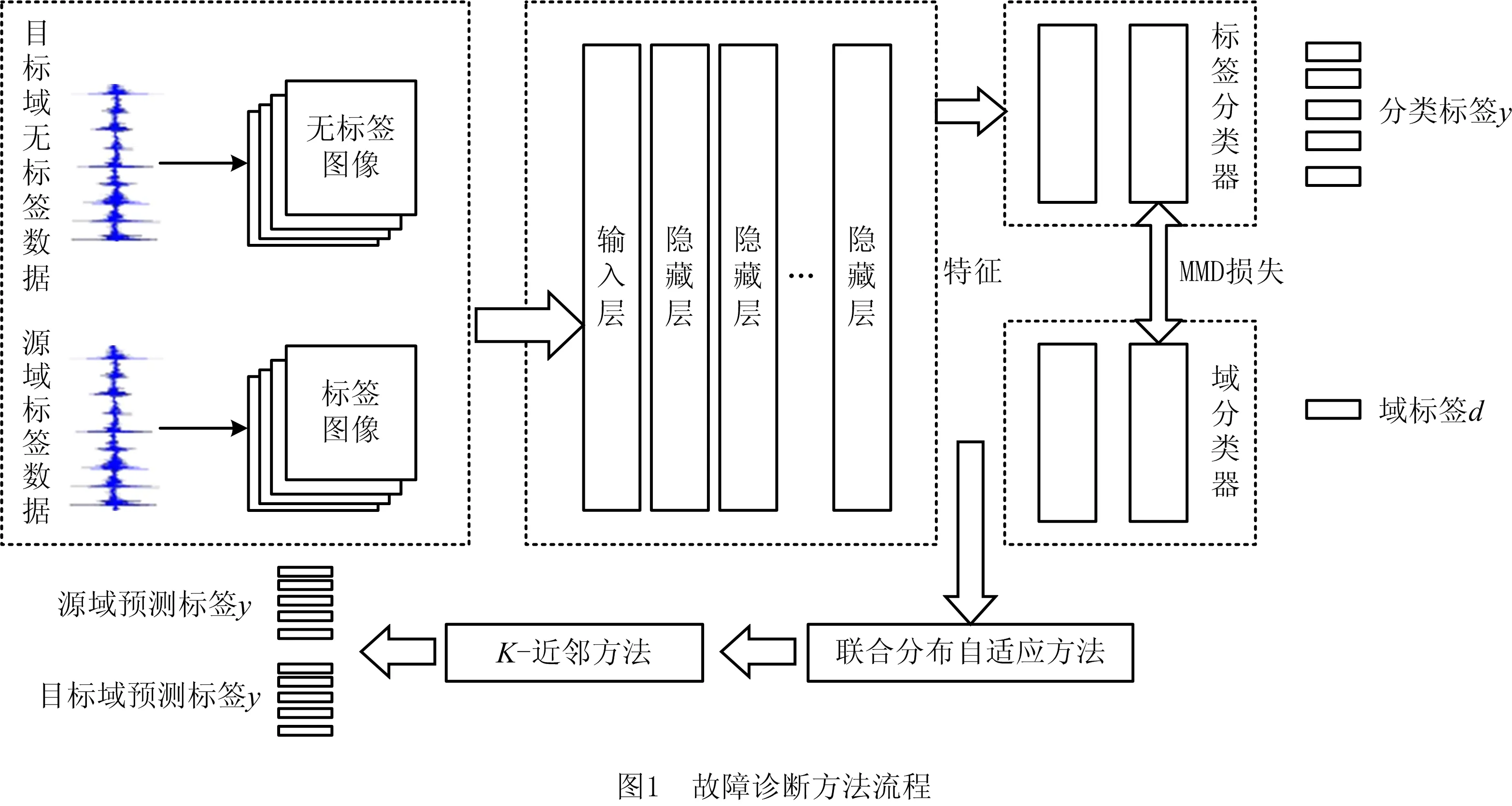
该无监督故障诊断方法包括信号预处理阶段、基于域适应神经网络模型深度训练阶段和联合分布自适应浅层训练3个阶段,方法整体流程框架如图1所示。该方法主要包括3个步骤:①将源域有标签的故障诊断数据与目标域无标签的故障的数据均转化为RGB图像。②将源域所转化的RGB图像训练卷积神经网络(Convolutional Neural Network, CNN)构成特征生成器与Softmax分类器,与源域标签一起训练得到一个源域的特征生成器与分类器,再将目标域所转化的RGB图像也参与原始特征生成器与分类器的训练,在分类损失函数的基础上加入MMD最大平均差异度量损失函数,最终实现基于域适应神经网络模型的训练。③源域数据与目标域数据经过深度域适应网络模型得到的源域特征与目标域特征,将所得到的特征作为联合分布自适应方法的输入,构建MMD矩阵,寻求自适应矩阵,将源域特征与目标域特征进一步映射至域相近的高维空间,然后使用K-近邻方法,最终完成目标域的预测。
该方法主要适用于机械设备工作环境经常发生变化、故障数据分布发生改变的情况,机械设备在某一工作条件下,已经获得了较多的振动信号的标签故障数据,当机械设备工作环境发生变化,能够获得该机械设备的相同类型的振动故障数据时,可以通过该方法,在无需任何该工作条件下的带标签故障数据,就能提高机械设备在这一工作条件下的故障诊断的精度。
2.2 信号转图像
由于故障诊断信号一般为一维的时序振动信号,而卷积神经网络在对图像进行特征提取上具有杰出的表现,为了使卷积神经网络能对故障诊断信号进行较好的特征提取,将一维的时序信号转化为图像信号。
假设图像的大小为n×n,截取的步长为a,则第m个截取部分应为L(m×a+x)。 对截取部分使用快速傅立叶变换(Fast Fourier Transform, FFT),abs(·)函数对FFT变换结果取绝对值。然后,使用round(·)对信号进行四舍五入,最后将信号转换为RGB图像。
L(m×a+x)=abs(FFT(L(m×a+x))),
(6)
(7)
2.3 域适应神经网络结构与训练步骤
如图2所示,神经网络中特征生成器由3个卷积层、3个批标准化(Batch Normalization, BN)层、两个Max_poll2d层和一个全连接层组成,激活函数为线性整流函数(Rectified Linear Unit, ReLU)。分类器部分包括两个完全连接层和两个BN层。特征生成器部分生成的源域特征与目标域特征将用于计算源域与目标域之间的MMD损失,并将损失直接加入模型的分类损失中。域适应神经网络训练步骤如下:
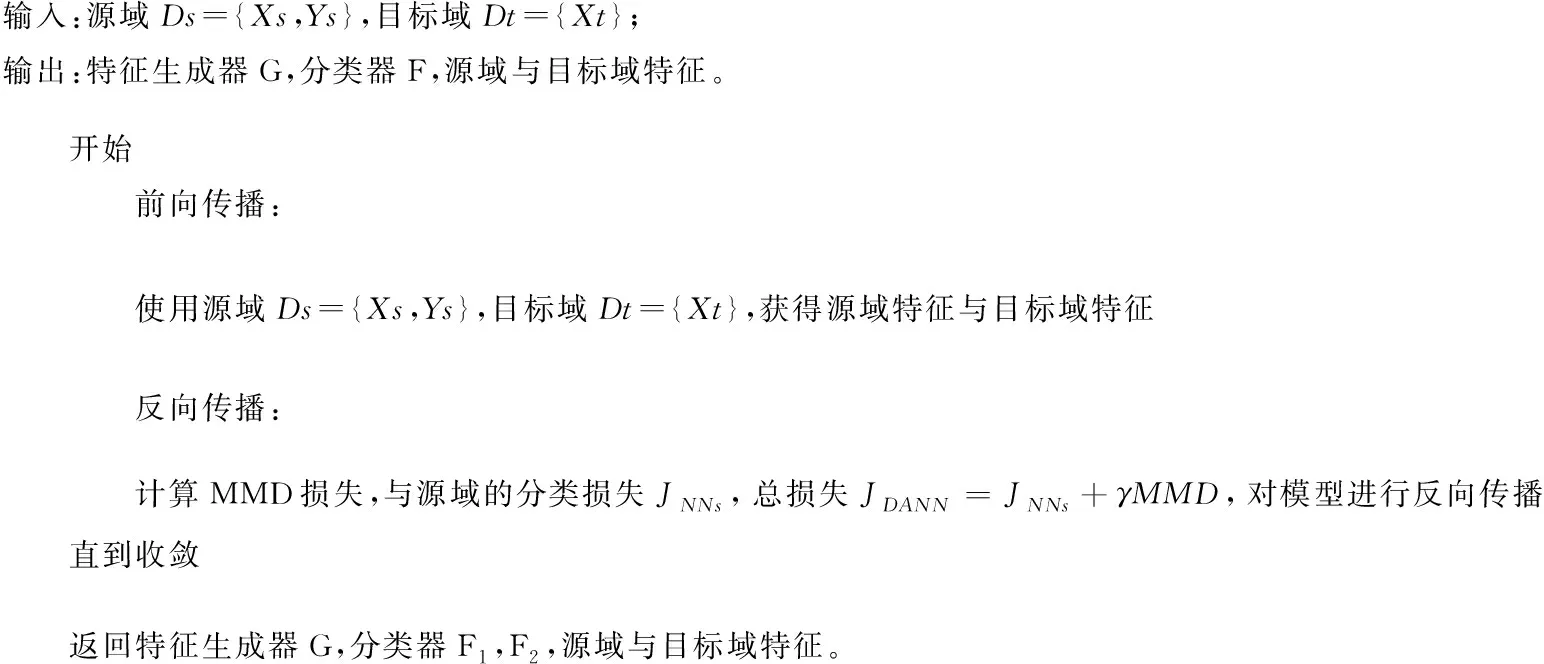
输入:源域Ds={Xs,Ys},目标域Dt={Xt}; 输出:特征生成器G,分类器F,源域与目标域特征。 开始 前向传播: 使用源域Ds={Xs,Ys},目标域Dt={Xt},获得源域特征与目标域特征 反向传播: 计算MMD损失,与源域的分类损失JNNs,总损失JDANN=JNNs+γMMD,对模型进行反向传播直到收敛 返回特征生成器G,分类器F1,F2,源域与目标域特征。

3 实验结果与分析
将基于域适应神经网络方法与联合分布自适应方法在著名的滚动轴承数据集上进行实验。该实验在目标域没有任何标签样本数据下,对目标域进行无监督故障诊断,通过与其他实验进行对比,来讨论该方法在处理由于工作条件变化而带来的故障诊断无监督问题上的有效性与适用性。另外,为了模拟故障诊断问题在实际生产过程中的情况,逐步降低源域中标签样本数量,讨论源域中标签样本数量变化对该方法所产生的影响,进一步讨论该方法在无监督故障诊断问题上的有效性与适用性。
本实验采用Python编程,程序的运行环境是Win10系统,Inter i7处理器,9 750H CPU,主频2.6 GHz。
3.1 故障诊断数据集
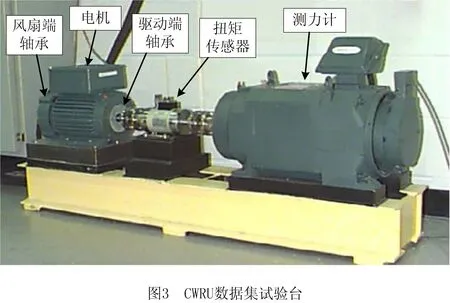
凯斯西储大学(Case Western Reserve University, CWRU)数据集[33]是著名的机械设备故障诊断数据集,由Reliance电动机驱动,驱动轴上安装扭矩传感器,将故障植入到驱动和风扇端轴承。故障类型有内圈断层、外圈断层和球断层,这3种故障均有3种不同的尺寸大小,分别是0.007英尺、0.014英尺和0.021英尺。加上健康类型,因此CWRU数据集的故障诊断数据有10种故障类型。这10种故障类型在0~3马力的负载下都有记录。因此,整个CWRU故障诊断数据集可以获得4个不同的工作条件下的实验数据。如图3所示为CWRU数据集试验台。
3.2 CWRU数据集数据分布分析
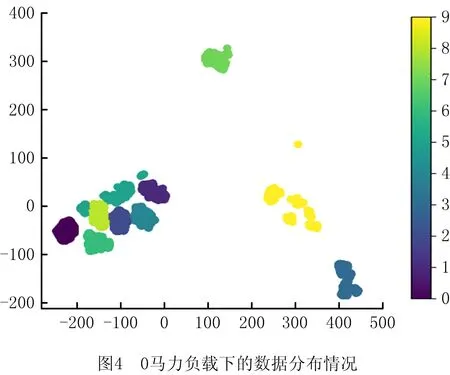
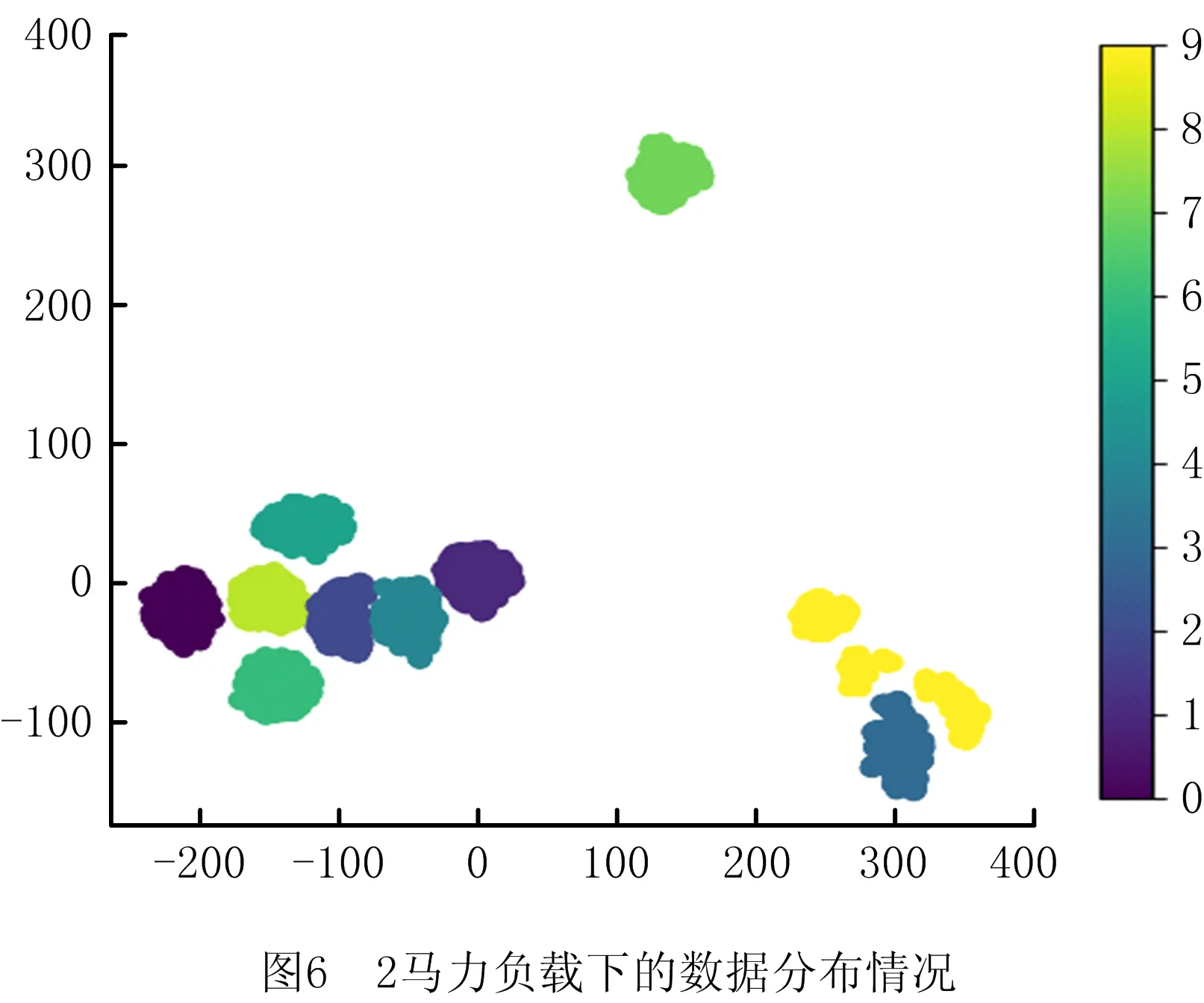
CWRU数据集有4种工作状态下的数据,为了验证所提方法是否能够处理故障诊断的数据分布不同的问题,本节将讨论CWRU数据集在不同工作状态下的数据以及其数据分布是否会发生变化为了更加直观地体现CWRU数据集的数据分布,采用随机近邻嵌入(T-distributed Stochastic Neighbor Embedding, TSNE)的方法,先对不同工作状态下的1 024维特征的数据进行聚类,投射到二维空间,然后再根据真实标签,画出其数据分布,如图4~图7所示。图4~图7中横纵坐标分别代表该聚类后二维空间的坐标,图中不同颜色代表在该工作状态下数据的真实标签。总共10种类别,分别对应10种颜色。
从图4~图7可以看出,CWRU数据集中,不同马力负载下,不同类别的数据经过TSNE聚类后,在二维空间的分布情况发生了不同程度的变化,证明其原始数据的数据分布均发生了不同程度的变化,若直接将在某一马力负载下训练出来的模型运用在另一负载下,其模型性能将会大大降低,因此所提的方法在该情况下具有较大意义,使用CWRU数据集完成所提方法有效性验证具有较大说服力。


3.3 训练数量变化时迁移学习方法效果
CWRU数据集是著名的滚动轴承数据集,数据集内采集了不同工作状态的机械振动信号,3.2节也证明了不同工作状态的机械振动信号,其数据分布也不同。因此,本节将基于域适应神经网络与联合分布自适应方法用于该数据集进行无监督故障诊断的方法验证,将某一工作状态下的数据作为源域数据,将另一工作状态下的数据作为目标域数据。考虑到在实际生产过程中,源域的数据也可能会较少,为了进一步验证所提方法的有效性与可行性,在目标域无任何标签数据的情况下,减少源域的标签数据,讨论源域训练样本数据量变化对该方法所产生的影响。本部分实验将原始源域训练数量从16 000幅降低为1 600幅。为了保证实验的一般性,每组实验均连续运行了10次,并将4种不同状态的数据分别当作源域和目标域进行了实验。如表1所示,L0、L1、L2与L3分别代表0马力负载、1马力负载、2马力负载与3马力负载的情况。例如L0-L1代表将0马力负载的数据作为源域、1马力负载的数据作为目标域而进行的实验,表中给出的为95%的置信区间。表1给出了源域标签数量为16 000时,目标域作为测试集的实验准确率,表2给出了源域标签数量为1 600时,目标域作为测试集的实验准确率。
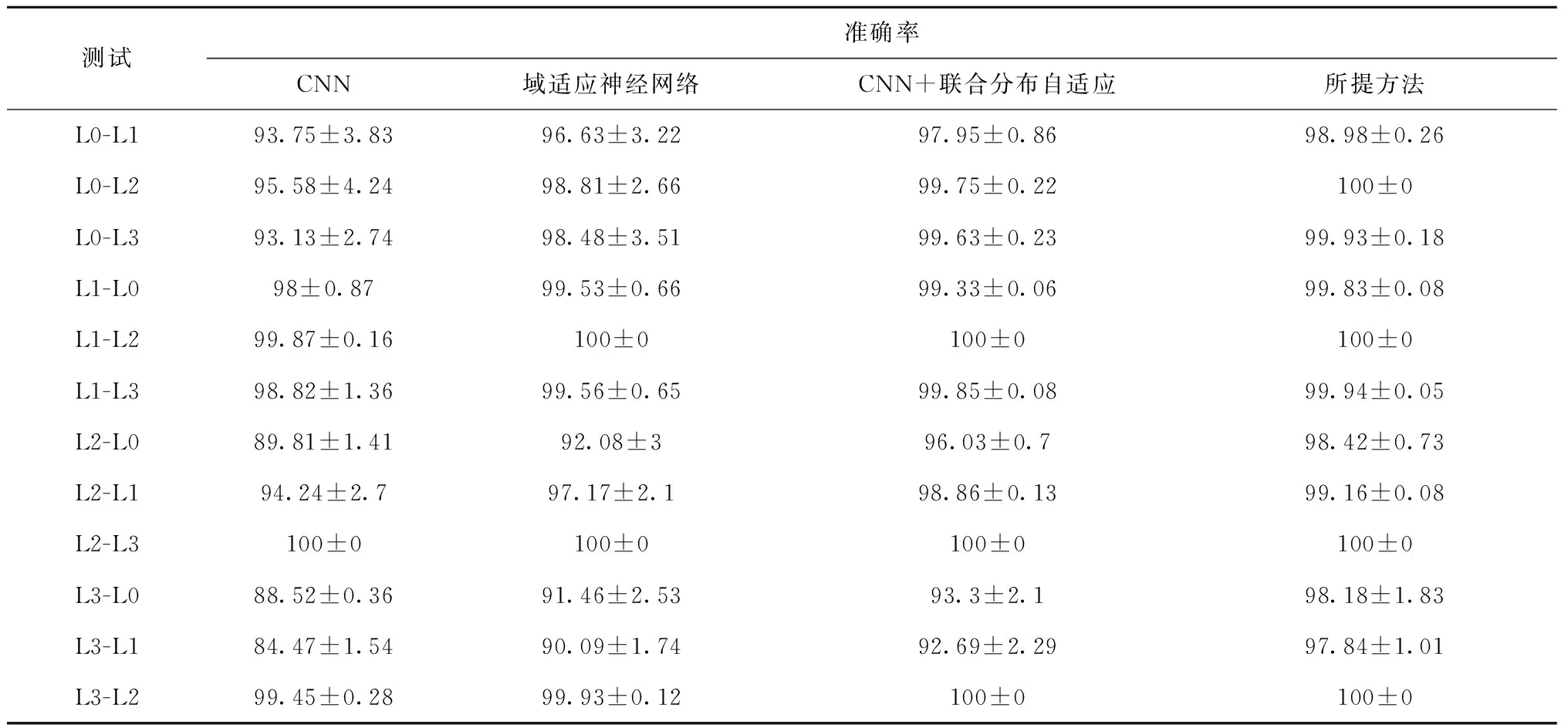
表1 源域标签数据量为16 000时目标域实验准确率
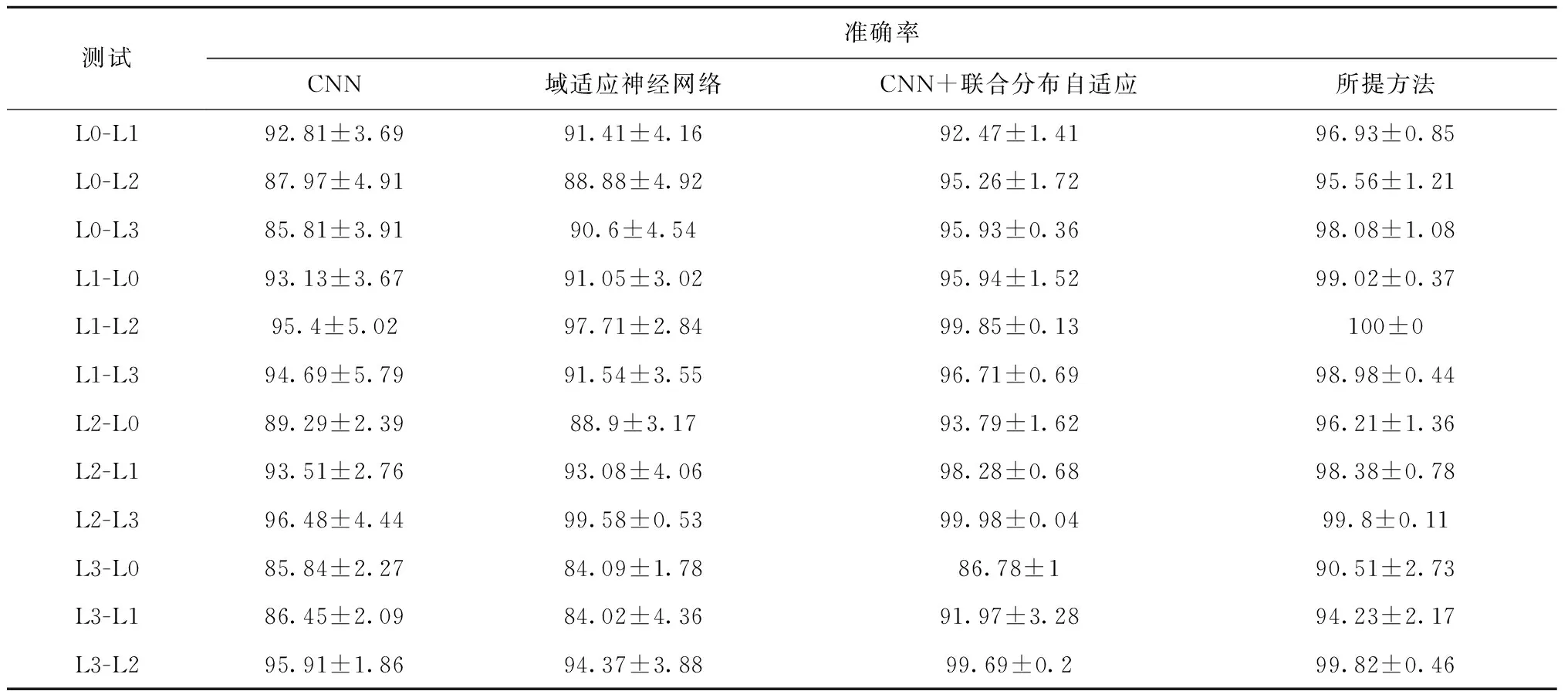
表2 源域标签数据量为1 600时目标域实验准确率
从表1和表2可以看出,在未经过任何域自适应迁移学习方法的处理下,只利用源域数据训练的CNN模型在目标域上的准确率较低,分别经过域适应神经网络与联合分布自适应方法处理过的模型,可以适当地提高目标域无监督故障诊断的准确性与稳定性,同时经过域适应神经网络与联合分布自适应方法处理过的模型,能够达到更高的准确性与稳定性。另外,在面临更为严峻的故障诊断条件下,即源域的标签数据减少到1 600时,只利用CNN模型的方法准确率下降明显,分别只利用域适应神经网络与联合分布自适应方法的模型,准确性也下降较多,基于域适应神经网络与联合分布自适应的方法均优于其他方法。
3.4 所提方法与其他方法的结果对比
为了进一步说明所提方法的优势,证明所提方法的有效性与可行性,将基于域适应神经网络与联合分布自适应的方法与已有的其他迁移学习模型方法进行比较(如表3),分别为:由ZHANG等[34]提出的自适应批量归一化方法(Adaptive Batch Normalization, AdaBN)方法,LI等[35]提出的多层最大平均化差异方法(Maximum Mean Discrepancies-Multiple Layers, MMD-ML),ZHANG等[36]提出的对抗域适应卷积神经网络(Adversarial Adaptive Convolutional Neural Networks,A2CNN)方法。表3中,其他方法在文献中只给出了部分迁移学习情况的数据结果,并且只有平均值,未给出置信区间。本文所提方法给出了全部测试情况的95%的置信区间结果。

表3 所提的方法与其他模型比较
由表3可以看出,所提方法在平均准确率上高于其他方法,这是因为所提方法使用了特征提取能力较强的CNN网络,并多次使用域适应方法,使得源域与目标域的特征能够在高维空间维度上尽可能地相近,从而进一步证明了所提方法的有效性。
综上所述,基于域适应神经网络与联合分布自适应方法在目标域的无监督故障诊断上可以达到较高的准确率,因此基于域适应神经网络与联合分布自适应的方法可以有效地对知识进行迁移,所提方法能够处理由于数据分布改变造成的无监督故障诊断问题,该方法可以训练出更高的准确率与更具鲁棒性的无监督深度学习故障诊断模型。
4 结束语
为了解决由于工件状态经常发生变化,训练集与测试集数据分布不同,导致的目标域中无标签样本的故障诊断问题,本文提出一种基于域适应神经网络与联合分布自适应的无监督故障诊断方法,通过CNN卷积神经网络模型从预先转化为图片的故障振动信号数据中提取深度特征,利用域适应神经网络模型将不同数据分布的数据在深度特征维度上进行数据分布的拉近,再利用联合分布自适应方法,再次将训练得到的深度特征映射至高维特征空间,使得源域与目标域的边缘数据分布与条件分布进一步靠近,最后得到分类结果。在凯斯西储大学的数据集上完成了实验验证,对故障诊断条件进一步限制,逐步降低源域中标签样本数量,以验证模型的有效性与可行性。结果表明,基于域适应神经网络与联合分布自适应方法的模型能够在无监督故障诊断问题上得到更高准确率与更具鲁棒性的结果,从而验证了算法具有可行性与有效性。
本研究只对故障诊断中的故障振动信号进行了讨论,未讨论其他类别的故障诊断信号,因此未来可以针对不同类别的故障诊断信号提出合适的模型。
猜你喜欢
一重技术(2021年5期)2022-01-18
计算机技术与发展(2020年11期)2020-12-04
车迷(2018年11期)2018-08-30
电子制作(2018年10期)2018-08-04
海峡姐妹(2018年3期)2018-05-09
北京航空航天大学学报(2016年6期)2016-11-16
青年文学家(2015年29期)2016-05-09
Coco薇(2015年11期)2015-11-09
少儿科学周刊·少年版(2015年2期)2015-07-07
汽车电器(2014年5期)2014-02-28
