
架空乘人装置自转抗绳轮的设计与应用
2022-09-11 01:27王球龙
设备管理与维修 2022年11期
王球龙
(湘煤立达矿山装备股份有限公司,湖南株洲 412000)
0 引言
架空乘人装置作为矿井辅助运输系统的一种运输装置,因其具有运行安全可靠、运载效率高、操作简单、低能环保等优点,现已广泛应用于矿山生产中。由于矿山巷道的多样性,架空乘人装置在设计、安装时需要考虑适应各种巷道的现场情况,例如绞车与架空乘人装置同巷安装、巷道宽度窄、巷道沿线有多点拐弯等,在这类巷道中安装架空乘人装置时,需要配备抗绳(收绳)装置和拐弯装置等。
1 自转抗绳轮的技术研发背景
架空乘人装置常使用的抱索器类型一般有固定抱索器、大坡度可摘挂抱索器(卡钳式抱索器)、活动抱索器(瓦片式抱索器)等。
1.1 固定抱索器
固定抱索器配合普通的抗绳轮,通过抗绳轮收绳,能实现架空乘人装置在窄巷道的安装。运行缺点:运行中固定抱索器由牵引钢丝绳带动,以撞击的方式通过抗绳轮,长时间运行,会对抱索器产生严重的损伤,造成抱索器松动,出现抱索器抱不紧的情况,容易发生乘人器打滑现象,存在安全隐患。
固定抱索器配合普通的托轮组,通过多组托轮组按照特定的方式安装,能实现架空乘人装置在多点拐弯巷道中的安装。运行缺点:随着长时间的运行,拐弯点的多组托轮组的托轮轮衬发生磨损,牵引钢丝绳的运行轨迹发生变化,造成牵引钢丝绳运行时容易发生掉绳现象,存在安全隐患。
1.2 大坡度可摘挂抱索器
大坡度可摘挂抱索器配合转弯轮组、可旋吊椅,能实现架空乘人装置在单向拐弯巷道中的安装。运行缺点:①随着长时间的运行,拐弯点转弯轮组的轮衬发生磨损,牵引钢丝绳的运行轨迹发生变化,造成牵引钢丝绳在运行时容易发生掉绳现象,存在安全隐患;②只能适应多点单向拐弯的巷道,对于多点S 形拐弯巷道无法安装。
活动抱索器配合单独的轨道,能实现架空乘人装置在多点S 形拐弯巷道中的安装。运行缺点:①拐弯点只能是在水平位置拐弯;②抱索器靠运行惯性在轨道上滑行通过,无运行动力保障;③活动抱索器适应的最大巷道坡度不能超过18°。
2 自转抗绳轮的设计原理
根据《煤矿安全规程》的要求,秉承高效、安全、结构简单实用的设计原则,设计一种自转抗绳轮,使架空乘人装置能在窄巷道、多点拐弯巷道中安全可靠地安装、使用(图1)。
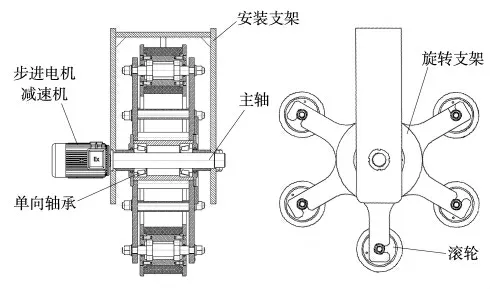
图1 自转抗绳轮结构组成
自转抗绳轮主要由步进电机、减速机、主轴、单向轴承、安装支架、旋转支架、6 个均匀分布的滚轮组成。步进电机通过键连接与主轴连接带动主轴,通过单向轴承带动旋转支架自转,自转的同时,滚轮与架空乘人装置的牵引钢丝绳之间通过滚动实现滚轮交替改变牵引钢丝绳的运行轨迹,自转抗绳轮通过安装支架整体安装在预埋横梁上。
3 自转抗绳轮在拐弯巷道中的应用
3.1 架空乘人装置的安装与运行轨迹
在S 形巷道中,架空乘人装置由驱动装置、从动装置、牵引钢丝绳及中间部分、内侧抗绳轮、自转抗绳轮、乘人器等部分组成(图2)。乘人器在架空乘人装置上按照设计负载要求,以一定的数量均匀分布在牵引钢丝绳上,随着牵引钢丝绳一起运行。架空乘人装置运行时,牵引钢丝绳按图2 箭头所示方向运行,乘车人员通过乘人器,由牵引钢丝绳带动,从驱动装置依次经过内侧抗绳轮、自转抗绳轮,达到从动装置,将乘车人员从S 形巷道的高水平点送到低水平点,实现矿山巷道内的运人目的。
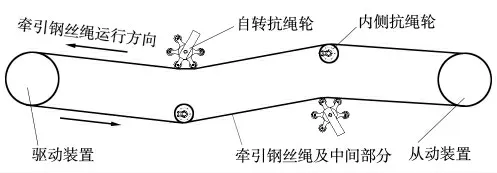
图2 架空乘人装置安装示意
3.2 自转抗绳轮运行原理
乘人器经过自转抗绳轮时的运行过程如图3~图6 所示。
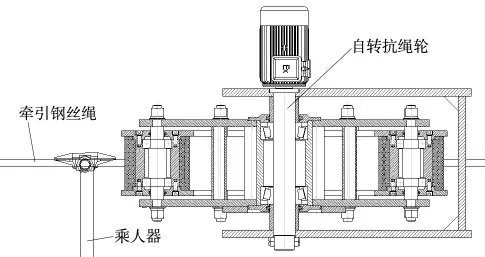
图3 局部主视图
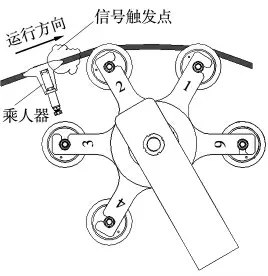
图4 乘人器达到自转抗绳轮前
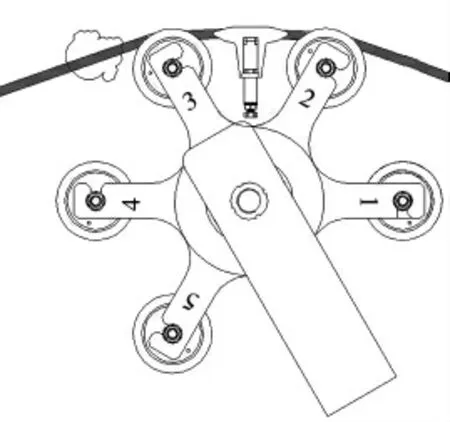
图5 乘人器经过自转抗绳轮(2 号、3 号滚轮接触钢丝绳)
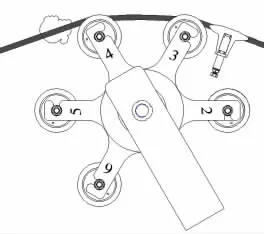
图6 乘人器通过自转抗绳轮(3 号、4 号滚轮接触钢丝绳)
图3 中乘人器由固定抱索器、乘人吊椅组成,乘人器通过固定抱索器固定在牵引钢丝绳上,在架空乘人装置运行的过程中,乘人器随着牵引钢丝绳一起往前运行。
图4 状态下,乘人器在自转抗绳轮的2 号滚轮与3 号滚轮中间的空白区域,空白区域内装有检测乘人器有无的信号触发器,图中由1 号、2 号滚轮与牵引钢丝绳接触,牵引钢丝绳受1号、2 号滚轮抗绳作用,牵引钢丝绳的运行轨迹发生平滑的角度转变,当乘人器到达自转抗绳轮前的信号检测点时触发信号,通过控制步进电机的转动,以匹配牵引钢丝绳运行的速度带动自转抗绳轮旋转支架转动,自转抗绳轮旋转支架转动的同时,1 号、2 号滚轮在牵引钢丝绳上发生相对位移的同时自身也在牵引钢丝绳上滚动。
乘人器由图4 的位置随着牵引钢丝绳运行到图5 的位置,该状态下,与牵引钢丝绳接触的自转抗绳轮滚轮由1 号、2 号滚轮变成2 号、3 号滚轮,牵引钢丝绳由架空乘人装置的驱动装置驱动继续往前运行,自转抗绳轮由步进电机驱动继续转动。
乘人器由图5 所示的位置随着牵引钢丝绳运行到图6 所示的位置,该状态下,与牵引钢丝绳接触的自转抗绳轮滚轮由2 号、3 号滚轮变成3 号、4 号滚轮,此时,乘人器已完全通过自转抗绳轮,随着牵引钢丝绳在驱动装置的驱动下继续沿牵引钢丝绳运行轨迹往前运行。当乘人器完全通过自转抗绳轮之后,自转抗绳轮步进电机停止工作,自转抗绳轮停止转动,完成一个运行周期,自转抗绳轮转动120°,完成乘人器在牵引钢丝绳上的拐弯运输。
当下一个乘人器随着牵引钢丝绳达到图4 所示位置时,触发自转抗绳附近的信号触发器,自转抗绳轮、乘人器、牵引钢丝绳重复图4~图6 的动作,周而复始,完成架空乘人装置上多个乘人器在牵引钢丝绳上的拐弯运输。
乘人器逐步通过自转抗绳轮完成拐弯运输,在乘人器随着牵引钢丝绳整体通过自转抗绳轮的整个过程中,乘人器不与自转抗绳轮接触,没有撞击现象,整个运行过程平稳、安全,对固定抱索器没有撞击损伤,保证了固定抱索器的使用安全,从而提高架空乘人装置的安全使用性能。
图4~图6 所示为乘人器通过一套自转抗绳轮的整体过程,在实际应用中,由于自转抗绳轮滚轮轮衬的受力磨损情况,考虑自转抗绳轮滚轮轮衬使用寿命需要达到6~12 个月,因此在设计自转抗绳轮时,一般一套自转抗绳轮设计成能实现牵引钢丝绳10°的转向,当架空乘人装置的安装巷道存在大角度拐弯时,可沿牵引钢丝绳运行方向,在巷道大角度拐弯处多点紧密排列布置多组自转抗绳轮,实现大角度巷道中牵引钢丝绳转向运行的目的。
4 自转抗绳轮控制原理
如图7 所示,当乘人器达到信号触发点触发信号,将信号反馈给架空乘人装置的PLC 控制箱,PLC控制箱发出控制信号控制步进电机转动。

图7 自转抗绳轮控制逻辑
(1)步进电机转速计算。步进电机转速:

式中 n——步进电机转速,r/s
V——牵引钢丝绳运行速度(架空乘人装置设计运行速度),m/s
R——自转抗绳轮滚轮外切圆半径,m
i——减速机速比,架空乘人装置选型设计值
按照式(1),根据架空乘人装置的运行速度、特定的减速比,计算出与牵引钢丝绳同步的转速值,使乘人器通过自转抗绳轮时,自转抗绳轮与牵引钢丝绳同步运行。
(2)步进电机运行时间计算。一个乘人器完全通过自转抗绳轮,步进电机运行时间计算:
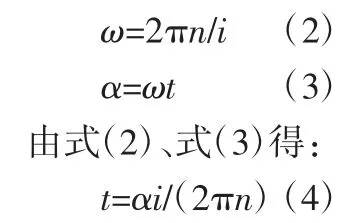
式中 n——步进电机转速,r/s
α——单个乘人器完全通过自转抗绳轮,自转抗绳轮转动的角度,取120°
ω——自转抗绳轮运转角速度,rad/s
i——减速机速比,架空乘人装置选型设计值
由式(4)计算出单个乘人器完全通过自转抗绳轮所需要的时间,即步进电机单次运行的时间。自转抗绳轮自接受信号发生转动开始,经过t 时长运行后停止运行,完成单次运行动作,等待下一个乘人器的到来,重复运作。
5 自转抗绳轮应用效果
(1)不受拐弯点在架空乘人装置安装巷道中的位置限制。大坡度可摘挂抱索器、活动抱索器架空乘人装置只使用于拐弯点位于巷道水平位置时的拐弯,固定抱索器配合自转抗绳轮,当巷道拐弯点位于水平巷、斜巷时均适用。
(2)固定抱索器配合自转抗绳轮实现拐弯的架空乘人装置,能适应多点S 形巷道中的安装,并经过拐弯点时,固定抱索器由牵引钢丝绳带动,运行过程中无撞击,无由于轮衬磨损而造成的牵引钢丝绳掉绳现象,运行更加安全;大坡度可摘挂抱索器配合可旋吊椅的架空乘人装置只能适应单向拐弯巷道的安装,且长期运行后,会出现由于轮衬磨损而造成的牵引钢丝绳掉绳现象,存在使用安全隐患;活动抱索器配合轨道的架空乘人装置,在通过拐弯位置时,抱索器的运行是靠其自身的运动惯性通过轨道,运行速度不可控;
(3)《煤矿安全规程》规定,架空乘人装置中,活动抱索器类型的最大使用角度为18°,可摘挂抱索器类型的最大使用角度为25°,固定抱索器类型的最大使用角度为28°。
综上所述,自转抗绳轮配合固定抱索器,使得架空乘人装置在窄巷道、沿线有多点拐弯巷道中的安装使用具有更高的适应性、耐用性和安全性。
6 结语
自转抗绳轮的设计,改变了以往架空乘人装置在窄巷道、沿线有多点拐弯等复杂巷道中的安装方式,解决了以往拐弯架空乘人装置在长期使用中的掉绳、抱索器打滑等缺点,不受拐弯点位置及拐弯方向的限制,适应坡度大、适应巷道情况广。提高了架空乘人装置对矿山巷道的适应性,减少乘坐人员的受伤因素,保证架空乘人装置的使用安全性能,具有一定的经济、社会效益。
猜你喜欢
科技与创新(2022年13期)2022-07-14
港口装卸(2022年3期)2022-07-06
客联(2022年3期)2022-05-31
初中生学习指导·中考版(2021年2期)2021-09-10
今日农业(2020年20期)2020-12-15
山东交通科技(2020年2期)2020-08-13
幼儿画刊(2019年9期)2019-11-04
冰雪运动(2019年2期)2019-09-02
商品与质量(2018年35期)2018-04-25
阅读(中年级)(2016年11期)2017-01-23
