
Lightnin静态混合器内气泡分散流体动力学特性实验研究
2022-09-13 07:58禹言芳刘桓辰孟辉波刘励图李毓吴剑华
化工学报 2022年8期
禹言芳,刘桓辰,孟辉波,刘励图,李毓,吴剑华
(1 沈阳化工大学机械与动力工程学院,辽宁 沈阳 110142; 2 沈阳化工大学辽宁省高效化工混合技术重点实验室,辽宁 沈阳 110142)
引 言
多相流混合在化学工业、制药工业、生物科学、食品生产等工业过程中广泛存在。气液两相流是分散相和连续相共存的湍流分散多相流,具有很强的湍流相互作用,其混合是一种复杂的过程[1-4]。近年来,众多学者在超重力反应器[5-6]、鼓泡塔[7-10]、搅拌槽[3,11-12]、流化床[12-13]、微通道[2,14]等不同反应器内的气-液两相流动和传质方面进行了深入的理论基础研究和工业化应用。
静态混合器是在光滑管中插入特定形状的混合元件,作为强化质量、热量传递和化学反应选择性的连续流设备之一,可以以更低的能耗实现更好的混合效果[15]。在低能耗条件下提高混合器的混合效率是评估混合器性能的标准之一,了解和预测流体之间的气泡流动行为对于提高生产效率和生产质量至关重要[16]。
Heyouni 等[17]对布置不同元件的静态混合器的压降、气泡直径和传质性能进行了实验研究,提出了一种传质系数经验关联式,并与文献中提出的其他关联式进行了比较。Tajima 等[18-20]实验研究了四种不同螺旋叶片的排列方式(MSM、KSM、SSM、RSM)对二氧化碳液滴分散的影响,发现KSM 的螺旋叶片排列方式可以更快地减小二氧化碳液滴的大小,且随着KSM混合元件数量的增加,形成CO2液滴的尺寸迅速减小,加快了二氧化碳的人工处理过程。Theron等[21]实验研究了不同元件数量和不同流量下SMX静态混合器内单相和两相流的压降和乳状液的液滴尺寸,发现需要10个混合元件就能达到破碎聚结平衡,并建立了一种预测Sauter 平均直径与Reynolds 数、Weber数以及混合元件数的经验关联式。
Azizi等[22]在不同气相和液相表观流速下考察了筛网式静态混合器内气液两相流动特性,改变相邻筛网的间距可以显著提升能量耗散率,从而提高传质速率,并引入静态表面张力作为评价传质效果的新指标,建立新的kLa关联式。Azizi等[23]从宏观混合的角度讨论了装有筛网型静态混合器的管式反应器/接触器的湍流气液流动的特性。通过使用四种不同几何形状筛网,研究了改变反应器构型和操作条件的影响。停留时间分布实验在湍流状态(4500 <Re<29000)下进行。使用去卷积技术,提取RTD 函数来量化轴向/纵向液相分散系数。研究结果表明,轴向分散随着流速和/或气相体积分数的增加而增加。然而,不管混合元件的数量和几何形状、反应器配置和/或操作条件如何,在存在筛网的情况下记录的液相轴向分散系数低于空管的液相轴向分散系数。此外,发现筛网的几何形状直接影响反应器中的轴向分散系数。Rabha 等[24]利用超快电子束X 射线层析成像技术,研究了垂直管道中螺旋静态混合器内气液湍流分散特性。从气泡尺寸分布和气含率两个方面量化了3、6 和9 个螺旋静态混合器元件的上游和下游的分散混合。通过气泡尺寸分布和界面面积密度对混合单元内的气泡破碎过程进行可视化和量化分析。计算了不同数量静态混合器单元和滑移量下单位液体质量的功率耗散。研究结果为螺旋静态混合器内气相分布的发展提供了新的视角,并为设计改进、流动条件优化和CFD 验证提供了良好的基础。Elias 等[25]通过实验系统地研究了两种不同内径的多孔结构反应器(DPSR),发现孔隙度是影响能量损失和传质能力的决定性因素,较大直径的DPSR 具有更大的孔隙度,带来更高的压降,但小直径的DPSR 具有更高的体积传质系数,这可能是大流量范围下的流型转变以及气液滑移速度导致的结果。
Pradip[26]综述了Lightnin 静态混合器(LSM)内CFD 研究进展,考虑了压降和摩擦系数的影响,采用VOF 方法可以更好地评价Reynolds 数Re=0~100时LSM 内混合性能。Altabash 等[27]利用筛网式静态混合器强化水中CO2的吸收能力,发现在相似的气体流量下筛网式静态混合器的强化传质性能比机械搅拌罐和鼓泡塔反应器分别增加70 倍和20 倍。Liu 等[28-29]基于背光源高速摄像方法,在常温常压下对叶片式旋流器诱导的30 mm内径的垂直管内气液两相旋流流型和转捩准则进行了实验研究,识别出旋流气柱流、旋流间歇流、旋流环空流、段塞流和混流5 种典型流型,并利用流态重构技术对其过渡边界的详细特征进行了讨论。Scala 等[30]采用粒子图像测速(PIV)和背光成像(BST)技术,分析不同混合器长度、气相流量和喷嘴尺寸条件下SMX 静态混合器内正庚烷-氮气体系气泡的大小、形状、速度和位置,评价SMX 混合器入口和出口处气泡的平均Sauter 直径。Meinecke 等[31]利用背光成像和粒子图像测速技术,开发了一种用于两相气泡流研究的简单光学测量方法。除气泡尺寸、比表面积和体积外,还准确估计了静态混合器出口处分散相的平均质量流量和分散相在连续相中的平均溶解量。该方法已在空气-甘油、水-油、CO2-甘油和CO2-PEG6000体系中进行了验证。
本课题组[32-33]已对LSM 内流动和传热特性进行初步研究,为了进一步探究Lightnin 静态混合器中气液两相混合过程的流动及气泡流特性,本文对Lightnin 静态混合器内连续相水表观速度UL=0.071~0.127 m/s 和离散相空气表观速度UG=0.007~0.042 m/s 条件下两相流压降及气泡的尺寸分布特性进行研究。
1 物理模型及实验
1.1 静态混合器的物理模型
实验中采用的LSM 物理模型如图1 所示,LSM内混合元件由两个半椭圆形板和两个三角形板组成,相邻元件首尾交叉90°布置,强化段内含有10组混合元件,从下至上对混合元件进行编号。长径比为1 的单个LSM 混合元件长度l为100 mm,宽度为100 mm,厚度δ约为2 mm。气液预混实验段采用同心圆并行流动,主体混合管内径为100 mm,气体入口直径为9 mm。为了凸显LSM 对气泡群的强化分散性能,在强化段内左右旋周期交错90°布置4个长度为180 mm、宽度为100 mm 的KSM 叶片进行对照实验。

图1 LSM混合元件结构Fig.1 The structure of LSM
1.2 仪器及实验程序
LSM 内气液两相混合实验装置如图2 所示。气相和液相分别由无油空气压缩机(SY95/7)和不锈钢Wilo多级离心泵(MHI802)输送。两相工作流体在喷射泵中初始预混合后由混合器的底部注入。气体和液体的体积流量分别由精度等级1.5 的玻璃转子流量计G10-15 和不锈钢转子流量计LZD-50 联合控制。气相和液相经Lightnin 静态混合器充分混合后由旋风分离器将空气分离并将液体回收。LSM静态混合组件放置于内径为100 mm 的有机玻璃管中,圆管外设置方形有机玻璃夹套用来矫正光路在两相流场产生的畸变。

图2 LSM内气液两相流实验装置Fig.2 Experimental setup of the gas-liquid two-phase flow in LSM
采用高速相机(Revealer-2F04M)拍摄和捕捉静态混合器内气液两相流实验流场[34]。高速相机Revealer-2F04M 的 精 度8 bit,分 辨 率1920×1080。相机的测量坐标由3D同步坐标架(234000 SDZ5835)控制,从上至下依次设置MW0652、MW0935、MW1150 和MW1227 四个轴向拍摄窗口,各窗口位置测量范围分别为364~657、654~937、883~1168、953~1237 mm。图像的采样时间为20 s,拍摄帧率为180 FPS。
2 结果与讨论
2.1 静态混合器强化气泡分散
本实验以空气作为分散相,气相表观速度UG范围为0.007~0.042 m/s;水作为连续相,液相表观速度UL范围为0.071~0.127 m/s,对应的液相Reynolds 数范围为Re=7059~12706。平均气含率α表示整体气相体积分数[17],图3(a)为实验气相表观速度-液相表观速度-整体平均气含率的匹配关系三维图,由图可知平均气含率范围为5.26%~37.50%。由于混合器内液相表面张力、曳力和重力等相互作用,在竖直管中形成不同的流型,这些流型决定了气液两相的混合效率及气泡的分布。根据Hewitt 等[35]提出的竖直上升空管的气液两相流型图[图3(b)],可知相同实验操作条件下空管内的气液流型为搅混流;本实验可进一步探索该流型对于含有强化元件的混合管内流型的适用性及混合元件对气泡群分散的强化特征。

图3 实验操作条件Fig.3 The experimental conditions
图4 和图5 分别揭示了在较低平均气含率和较高平均气含率下不同测量窗口中的气泡分布情况。在低气含率(α=5.26%~18.18%)且液相表观速度UL>0.085 m/s 时,气泡尺寸分布越来越小,且气泡形状主要为球形和帽形。随着平均气含率的增大,从图5 可以看出LSM 内流体的分割、径向混合和流体翻转之间的耦合作用仍对气泡的聚并有明显的抑制作用。同时,当液相表观速度UL不超过0.085 m/s且平均气含率α高达26.47%~37.50%时,LSM 内的气液两相流流型仍是泡状流,气泡均匀分布。显然,经典Hewitt-Roberts 流型图不再适用静态混合器内流型,LSM 静态混合器可以显著增强气液两相分散混合效果。
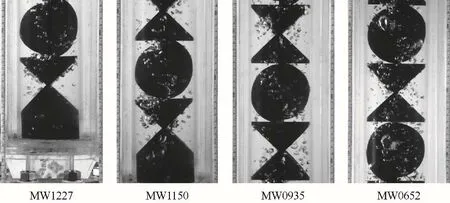
图4 UL=0.127 m/s和UG=0.007 m/s下LSM内不同测量窗口的气泡群分布Fig.4 The bubble group distribution in the different measurement windows of LSM at UL=0.127 m/s and UG=0.007 m/s
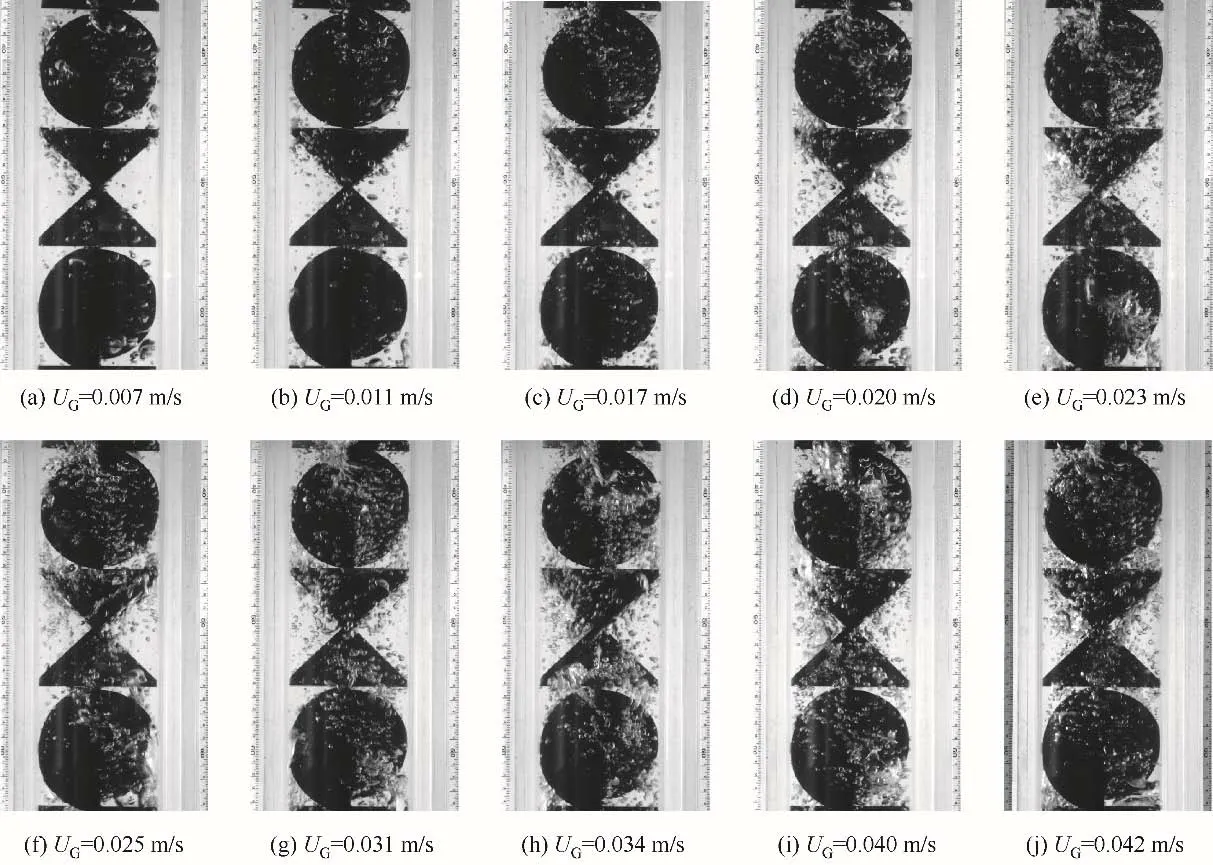
图5 UL=0.071 m/s时不同气相表观速度下MW0652位置处的气泡群演化Fig.5 The bubble group distribution at the MW0652 and UL=0.071 m/s with different gas superficial velocities
2.2 气泡群直径分布及LSM混合性能
采用Image Pro Plus 软件标定灰度图片中气泡的直径,其标定单个像素的精度为152 μm×148 μm。该软件以每两度为间隔测量通过气泡质心的直径,并将这些过质心的直径平均值作为气泡的平均直径。本文以Sauter平均直径d32来表征气泡群直径分布,定义为:

式中,ni,dB分别为第i组气泡的个数及其对应的气泡直径。
从LSM 的底部对每组混合元件进行编号并对流场内的气泡直径进行标定,如图6 所示。在相同气相表观速度下,LSM 中的气泡直径随着混合元件数量和液相表观速度的增加而明显减小。对于气液两相流速差较小的情况下,LSM 内的气泡d32变化呈两种趋势:在前两组混合元件中,气泡直径以较快的速率迅速下降,UL=0.085、0.106、0.127 m/s 时d32分别减小6.86%、8.10%、12.47%;在LSM 混合元件的下游,气泡直径以较慢的速率线性下降,变化率分别为0.97%~4.33%、1.03%~5.07%、1.19%~5.17%。随着液相表观速度的增加,气泡d32整体减小,在高Reynolds数的情况下尤为明显。造成这一现象的主要原因是气泡在较短的时间内被下游的LSM 混合元件连续分割。同时,由于LSM 内的流场剪切作用以及大气泡表面的不稳定和二次流涡的碰撞等因素导致气泡的破碎。较小的气泡因相间表面张力较大而不易发生气泡聚并。

图6 气泡d32与混合元件数量N的关系Fig.6 Relationship between the bubble d32and the number of mixing elements N
在气相表观速度UG=0.007 m/s 和液相表观速度UL=0.071 m/s 时,LSM 的MW0935、MW1150 和MW1227 三个测量位置处气泡d32的概率密度分布如图7 所示。随着混合元件的增加,气泡直径更小且分布更集中。这是因为随着轴向测量位置的增加,增强了气泡与湍流涡的碰撞频率,增大了气泡的破碎程度,使气泡尺寸不断减小。根据湍流理论,流场中气泡的破碎主要是湍流波动引起的,大尺度湍流涡对气泡仅起到运输作用,尺寸小于气泡直径的小尺度湍流涡是导致气泡破碎的主要因素[36]。但当气泡减小至一定程度时,小尺度湍流涡在流场的数量密度很小。此时,气泡的破碎速率与聚并速率达到平衡,使气泡尺寸保持在一定范围内且分布更集中。不同轴向测量窗口标定的气泡直径分布呈高斯分布,同时发现在气泡直径大于5 mm时存在拖尾现象。

图7 不同轴向测量位置气泡直径概率密度分布Fig.7 Probability density distribution of bubble diameter at different axial monitoring locations
为了考察LSM 相对于其他静态混合器在气液两相混合的优势,在相同混合长度和操作条件下,对KSM 内的气液两相气泡流特性进行实验对比研究,得到了图8 的对比结果。在相同气相表观速度下,KSM 内的d32随着轴向位置和液相表观速度的增加而逐渐减小。当液相表观速度UL=0.088、0.115、0.141 m/s 时,LSM 内 的 气 泡d32分 别 比KSM 小45.18%~54.84%、42.49%~53.16%、47.73%~57.69%。结果表明,LSM 对气泡的分散和破碎的促进作用十分明显,d32平均减小45.13%~55.23%。

图8 KSM和LSM不同轴向位置d32对比Fig.8 Comparison of average bubbles d32 of KSM and LSM in different axial positions
在对应于第4~6 组混合元件的MW0935 测量位置处,评估了LSM在相同气相表观速度(UG=0.007 m/s)和不同液相表观速度(UL=0.071~0.127 m/s)时气泡d32的分布,如图9 所示。随着液相表观速度的增大且远大于给定的气相表观速度时,气泡直径逐渐减小,二者之间存在近乎线性的关系,其经验拟合关系式为:d32=-59.1UL+9.8。此外,在图10中,考察了三种不同液相表观速度(UL=0.071、0.078、0.085 m/s)下,气泡d32随着气相表观速度增加的变化情况。当液相表观速度UL=0.071 m/s 时,LSM 中的气泡d32在气相表观速度为0.007~0.028 m/s 下逐渐减小,与气泡d32和气相表观速度变化的规律在UL<0.085 m/s时是相近的。这是由于液相湍流的增加而引起的,表明液相湍流在气泡破裂中起着十分重要的作用。当气相表观速度大于0.028 m/s 时,随着气相表观速度的不断增加,LSM 内气泡d32呈现出逐渐增大的趋势。这是由于离心力及气泡间的相互作用使气泡的聚并大于破碎导致的。

图9 MW0935位置处d32分布及线性拟合Fig.9 The distribution of d32 and linear fitting at the MW0935 window

图10 MW0935位置处d32随气相表观速度变化规律Fig.10 The distribution of d32 at the MW0935 window under different gas superficial velocities
图11 表示当在MW0652 测量位置处液相表观速度UL恒定为0.071 m/s 时,气相表观速度UG=0.007~0.042 m/s 下LSM 内气泡dB的概率密度分布(PDD)和累积密度分布(CDD)。在图11(a)中,PDD 的波峰向左移动且变得高窄,这表明LSM 内气泡dB随着气体表观速度的增加而逐渐减小,直到UG=0.028 m/s。实验证明,图11(b)中的情况与图11(a)的情况正好相反:随着气相表观速度继续增加(UG=0.028~0.034 m/s),PDD 的波峰向右移动且变得矮胖,造成这个现象的原因是气泡的聚并大于破碎。由于湍动能增加,LSM 内气泡dB的变化在UG>0.037 m/s 时逐渐趋于稳定。在图11(c)和图11(d)中,当UL=0.071 m/s和UG=0.028 m/s时,LSM 内气泡dB达到局部最小值,气泡直径dB/D0<0.02 的概率为33%,0.02~0.05 的概率为53%。当UL=0.071 m/s 和UG=0.007 m/s 时,气泡直径dB/D0在0~0.02、0.02~0.05 和0.05~0.08 范围内的概率分别为26%、43%和31%。在气泡直径dB/D0=0.07~0.08 的大气泡直径范围内,曲线呈长尾状,表明有一部分气泡经历了聚并。曲线中气泡直径较小一侧的拖尾表明,LSM 的分割、径向混合和流向改变等耦合作用在气泡群破碎过程中起着重要作用。

图11 LSM内概率和累积密度分布(MW0652,UL=0.071 m/s)Fig.11 Probability and cumulative density distribution of bubble mean diameter in LSM
在静态混合器的混合过程中,Berkman 等[37]将湍流破坏力等同于表面和内部黏性抗断裂力,在黏性抗断裂力极限情况下,得出了液滴/气泡直径的变化与Weber 数之间的关系[19-20]。通过用最小二乘法拟合,可以得出气泡Sauter平均直径d32、LSM 混合器内径D0和连续相的Weber数We之间的关系式:

同时混合程度还取决于入口流速引起的气泡停留时间[19]。不同表观速度下无量纲气泡直径和We与停留时间之间的经验拟合关系如图12 所示。气泡d32与液相表观速度无关,k是拟合线的截距,s是斜率。图12 拟合线的斜率s= -0.14,截距k=0.031,经验关联式可以写为:

无量纲d32/(D0We-0.41)与无量纲停留时间τ的偏差线和根据式(3)得到的实验结果关系如图12 所示。经验关联式具有较小偏差范围(-4.48%~+6.91%),可用于预测连续相高表观流速且气相体积分数低于7.69%下LSM内的气泡停留时间特征。
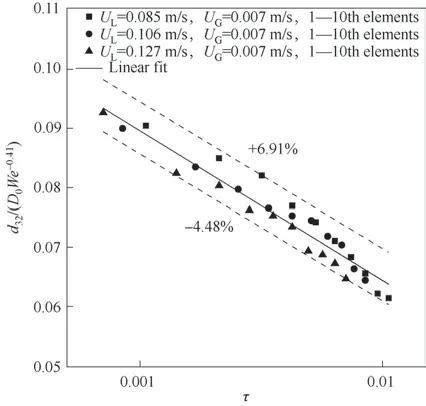
图12 无量纲d32/(D0 We-0.41)与无量纲停留时间τ的关系Fig.12 Relationship between the dimensionless d32/(D0 We-0.41)and dimensionless residence time τ
2.3 压降分析
压降作为评价静态混合器性能的重要指标,对于静态混合器选型以及所需能耗和使用成本都有重要影响。压降相较于流场的速度和浓度变化更敏感,因此对LSM 内的压降进行分析十分必要。评价静态混合器压降的方法有多种,摩擦系数就是表征压降的关键因素之一。相比于Z因子来说,摩擦系数f和压降直接相关。虽然二者计算得出的Z因子等价且具有相同的局限性,但f的直接相关性可以避免静态混合器与不同直径的空管作比值时发生混淆[38]。摩擦系数f定义为:

式中,ΔPLSM为LSM 混合元件前缘与后缘截面压降的面积加权平均值;D0为混合管内径;lm为混合段长度。在混合管内,摩擦系数f取决于LSM 混合元件的几何结构和流体的表观速度等因素。
图13 为UG=0.007、0.014、0.020、0.031、0.037 和0.042 m/s 条件下,摩擦系数f随液体表观速度的变化。从图13 可以看出,随湍流强度的增强,摩擦系数显著降低,在UG=0.007、0.014、0.020、0.031、0.037和0.042 m/s 时,LSM 的平均摩擦系数分别为7.73、10.53、12.62、15.69、17.21 和18.37,与UG=0.042 m/s相比,其余五种较小的气相表观速度下LSM 摩擦系数分别减小了49.63%~61.06%、37.39%~46.35%、27.54%~33.29%、11.61%~16.61%、5.69%~7.14%,是由于气相表观速度的增大显著增加了单位体积内气泡数量的密度函数,进而诱导气泡与元件表面发生碰撞,增大了旋涡二次流的强度[32]。
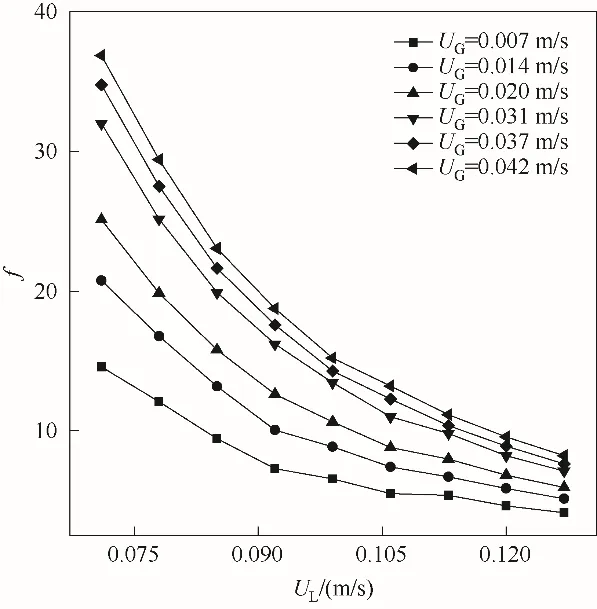
图13 摩擦系数随液体表观速度的变化Fig.13 The Darcy friction factor varies with the liquid superficial velocity
Lockhart 等[39]提出了一种适用于静态混合器的气液两相流压降预测方法,气液两相流压降ΔPGL可以由单独气相或单独液相时的压降计算,并给出了如下关系式:

式中,ΔL为压降长度;,为修正因子。Chisholm[40]提出了以下关系:

χ可以由两相压降表示,定义为:

对于非牛顿流体,C为流动指数n的函数:

牛顿流体满足n=1 和C″= 2C′[38],则C=C′。由此,结合气相和液相在相同操作条件下单独通过LSM 混合器内的压降数据[32],计算得出χ、ΦL、ΦG的关系及C的值。具体参数如表1所示。

表1 两相流压降预测参数Table 1 Pressure drop prediction parameters of two-phase flow
通过拟合,得到不同条件下C的关联式:

3 结 论
(1)在连续相表观速度较低(UL<0.085 m/s)和整体平均气含率α=26.40%~37.50%时,LSM 内的气液两相流动状态为泡状流。
(2)在液相表观速度UL=0.085、0.106、0.127 m/s下,前两组混合元件中气泡直径减小率分别为6.86%、8.10%、12.47%。在LSM 混合元件的下游,气泡直径以较慢的速率线性下降,变化率分别为0.97%~4.33%、1.03%~5.07%、1.19%~5.17%。
(3)气泡直径概率密度呈高斯分布,且直径较大的气泡概率密度曲线尾巴较长;随着轴向混合长度的增加,气泡直径概率密度峰值不仅朝着直径较小的方向移动,而且波峰变得越来越大和越来越窄。
(4)在UG=0.028 m/s 时得到气泡直径d32的局部最小值,气泡直径d32/D0小于0.02 的概率为23%,气泡直径d32/D0的53%分布在0.02~0.05的范围内,d32、液相Weber 数We和无量纲的停留时间τ之间的经验关系式为:d32/D0=0.031τ-0.14We-0.41。
(5)气液两相流动阻力系数随气相表观速度的增大而增大,随液相表观速度的增大而减小;通过实验数据拟合得到两相流压降预测Lockhart-Martinelli 关联式中参数C的关系式:C=5.26×105/Re0.74。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
柴油机设计与制造(2022年2期)2022-08-16
内燃机与动力装置(2022年3期)2022-07-12
商品与质量(2021年43期)2022-01-18
陶瓷学报(2021年4期)2021-10-14
食品安全导刊(2021年21期)2021-08-30
武汉科技大学学报(2021年3期)2021-04-21
保鲜与加工(2021年1期)2021-02-06
湖南饲料(2019年5期)2019-10-15
福建基础教育研究(2019年10期)2019-05-28
