超磁致伸缩微位移放大机构的设计与性能研究
2022-09-15 06:22刘旭辉宋浩然吴雁胡慧娜徐彬蒲美玲
机床与液压 2022年12期
刘旭辉,宋浩然,吴雁,胡慧娜,徐彬,蒲美玲
(1.上海应用技术大学机械工程学院,上海 201418;2.上海赫缘机电科技有限公司,上海 201104)
0 前言
随着近年来高精度高端制造等领域的不断发展,精密测量、高精度设备、航空航天制造等对微制动的要求越来越高,迫切需求能实现大行程与高精度的驱动装置。利用超磁致伸缩材料(Giant Magnetostrictive Material ,GMM)研制的超磁致伸缩驱动器(GMA),通过外加电流可控制其输出位移,响应快、精度高。但在一些特殊应用领域,需要对其输出位移进一步放大才能满足正常使用需求。
柔性铰链式放大机构具有放大效率高、整体负载性好、运动稳定等优点,在微位移驱动装置上被广泛应用。华顺明等对比了不同放大机构的优缺点,得出柔性铰链式放大机构结构简单、再现性好。虞启凯等根据压电驱动技术,设计出一种基于柔性铰链的微旋转平台,通过理论与仿真验证了该平台设计误差较小,具有较好的应用价值; QIU等研制出倾斜折叠的弯曲铰链,通过折叠弯曲单元实现可变刚度的目的。
基于前期驱动器研制,设计一种微位移放大机构,用于放大超磁致伸缩驱动装置的输出位移。通过理论计算分析放大机构的位移放大效果和整体静刚度;建立三维模型,并利用有限元仿真,验证机构正确性;通过实验测试系统,进一步对设计的放大机构进行实验验证。
1 杠杆式柔性微位移放大机构
1.1 柔性铰链结构选择
按照连接处切口形状,柔性铰链分为直圆形、椭圆形、复合多轴等。直圆切口形柔性铰链加工简易,在位移放大过程中位移损失量小,较为符合GMA驱动环境下位移的输出。综合考虑,文中选用直圆切口形柔性铰链,其结构简图如图1所示。

图1 直圆型柔性铰链
在理论计算时,不考虑铰链最小厚度和切口半径实际加工误差。将柔性铰链左端固定,在力以及力矩的作用下,铰链右端将产生变形,设转角变形量为,则柔性铰链在平面内绕轴的转角刚度为
(1)
其中:

(2)
=
(3)
式中:为弹性模量。计算得出的转角刚度将用于计算所设计的放大机构整体静刚度。
1.2 放大机构结构设计
位移放大机构采用对称杠杆式结构,图2所示为放大机构的1/2结构图。理想情况下输入位移经放大杆件2进行放大后,从输出杆件3处输出。在实际运动过程中,柔性铰链在转动时还会受到拉压力作用产生一部分的位置偏移,从而影响放大机构的位移放大比。因此,在理论计算整体刚度时需考虑这一部分的变形。
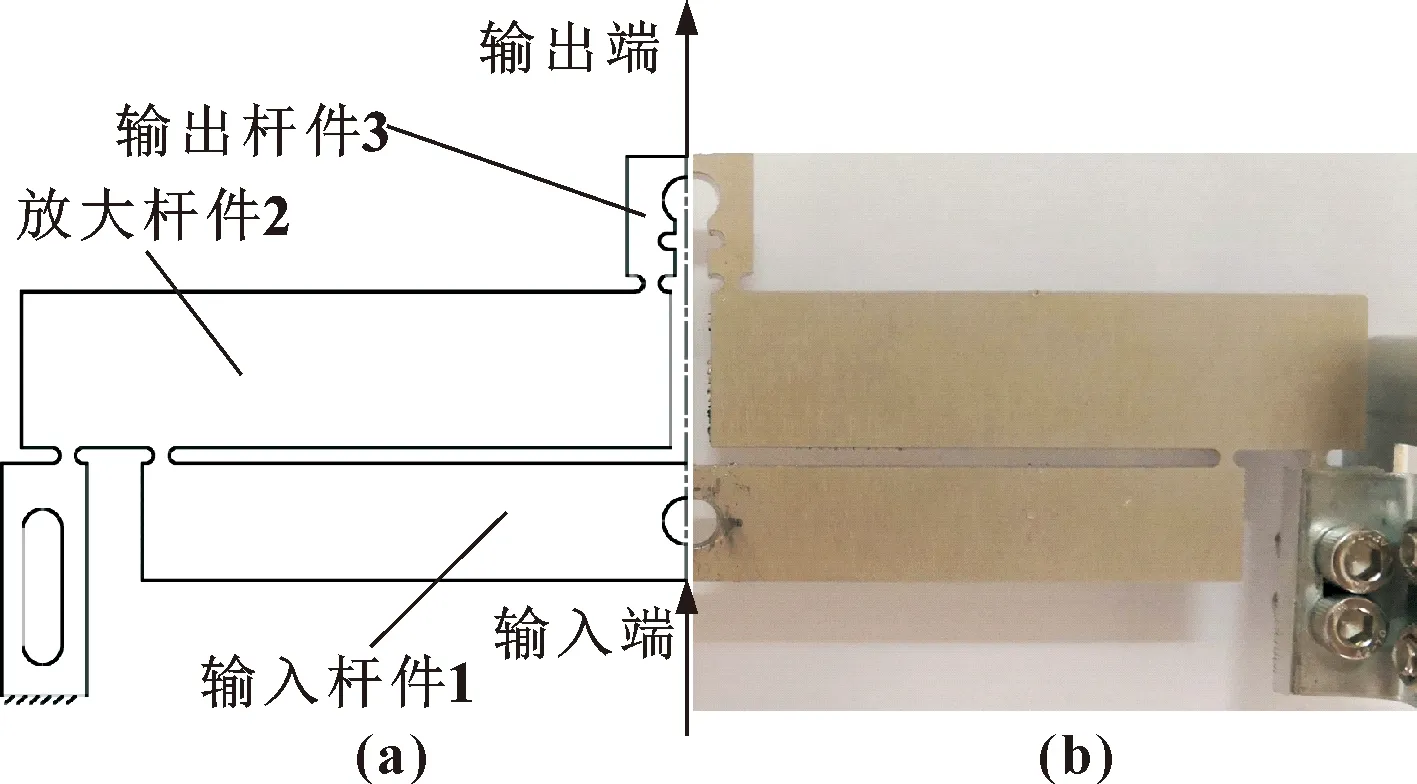
图2 微位移放大机构1/2模型(a)及实物(b)
2 微位移放大机构特性分析
2.1 放大机构转动特性分析
放大机构的几何原理如图3所示,包括输入位移、输出位移、输入力臂、杠杆放大臂、输出力臂等。、分别为、与水平线的夹角,为转动后的与垂直方向上的夹角。对转动的铰链进行编号,根据杠杆原理,放大机构的理论放大倍数为=。
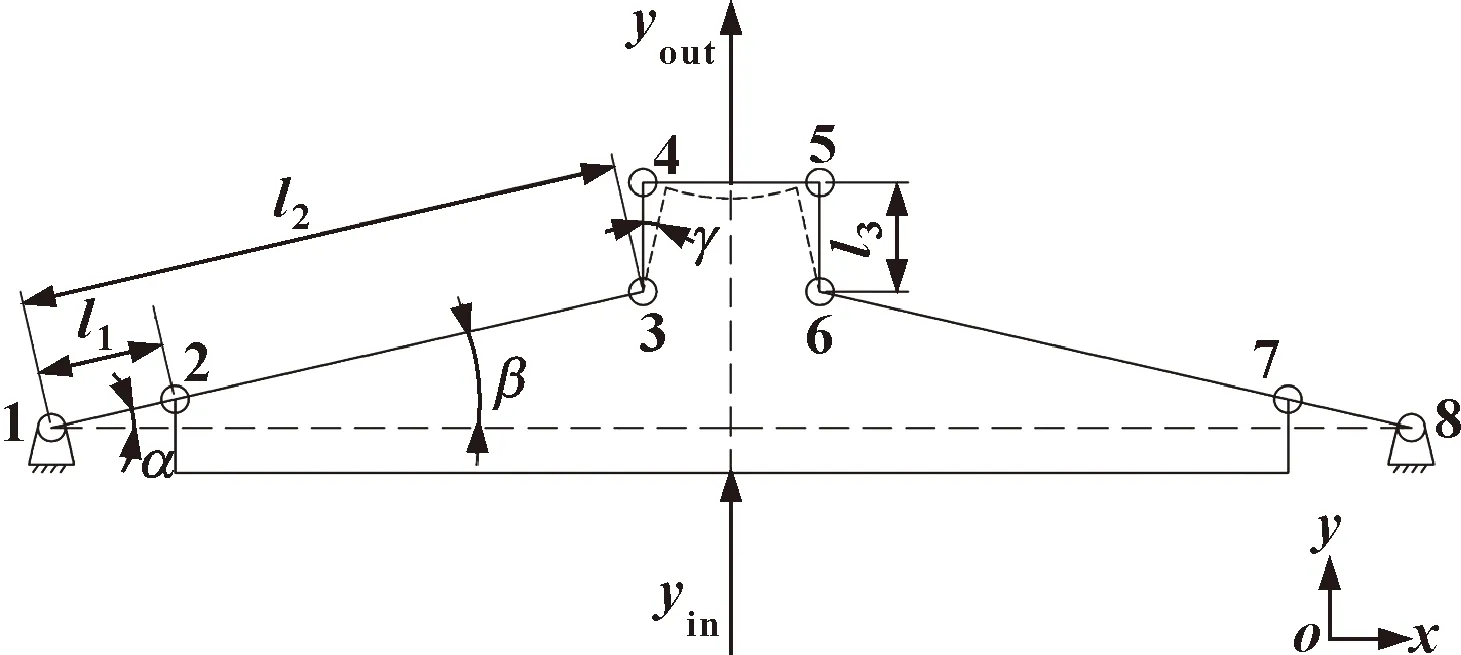
图3 放大机构几何原理
通过几何原理,得出与比例因子以及之间的转动关系,如图4所示。其中,=/。
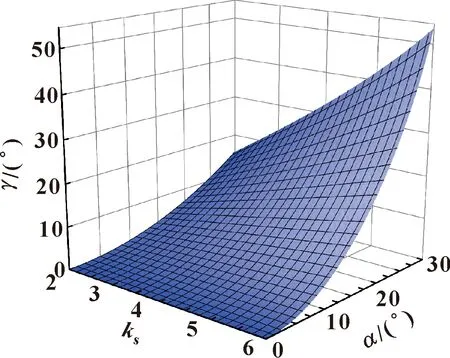
图4 α/ks与输出力臂转角的关系
根据图4及数据集,对在(3.0,5.0)内变化时,与变换的关系进行计算。发现位于(03°,10°)内时,两者具有良好的线性关系,当<03°时,<5,因此可将近似取为0。由此可得关系式:

(4)
2.2 放大机构静态整体刚度计算
在工作过程中放大机构会产生弹性形变,GMA输入位移会有一部分被机构本身吸收,由于机构自身存在一定刚度,会造成一部分的结构反力,导致输出力的损失。因此,需对静刚度等进行计算,分析其输出性能。
GMA在输入端输入驱动力,产生输出位移Δ,各个铰链发生角位移后,忽略拉伸变形量,设第处柔性铰链的转角刚度为、角位移为、柔性铰链储存的弹性势能为,设驱动力所做功为,根据功能原理有:

(5)
在实际工作中角位移足够小,则近似运算如式(6)所示,可得放大机构在方向上的静刚度如式(7)所示:
≈tan=Δ
(6)

(7)
3 放大机构有限元仿真
利用Creo/E创建三维模型,导入ANSYS中进行有限元仿真。放大机构设计材料选择Al7075,其弹性模量为71.9 GPa、泊松比为0.33、许用应力为270 MPa,设计参数如表1所示,切割的圆角半径由于加工误差设置为1.2 mm。
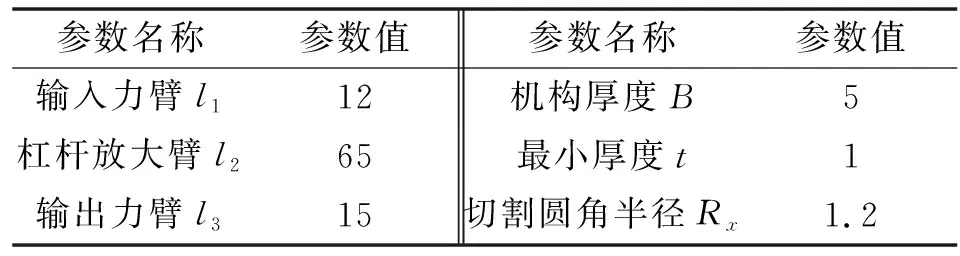
表1 放大机构设计参数 单位:mm
通过代入表1中数据计算可以得出,放大机构理论放大比=5.42,将数据代入公式(1)、(7)可得整体静刚度=1.32 N/μm。
图5所示为GMA输入位移为60 μm时放大机构的仿真结果。可知:放大机构的输出位移达到315.61 μm,放大比为5.26;在整个放大过程中,机构的最大应力为182.54 MPa<[]=270 MPa,故放大机构结构设计正确,其运动中最大应力出现在和连接的柔性铰链处。

图5 输入位移yin=60 μm时的仿真结果
放大机构整体静刚度、放大比的理论值与仿真结果对比如表2所示。可知:所设计的放大机构整体静刚度误差为6.45%、放大比误差为3.04%,误差合理,证明了所设计放大机构的模型正确性。

表2 放大机构整体静刚度与放大比的理论值与仿真结果对比
4 微位移放大机构性能实验
微位移放大机构整体安装结构如图6所示。其中,通过紧固螺钉将固定支架5固定。
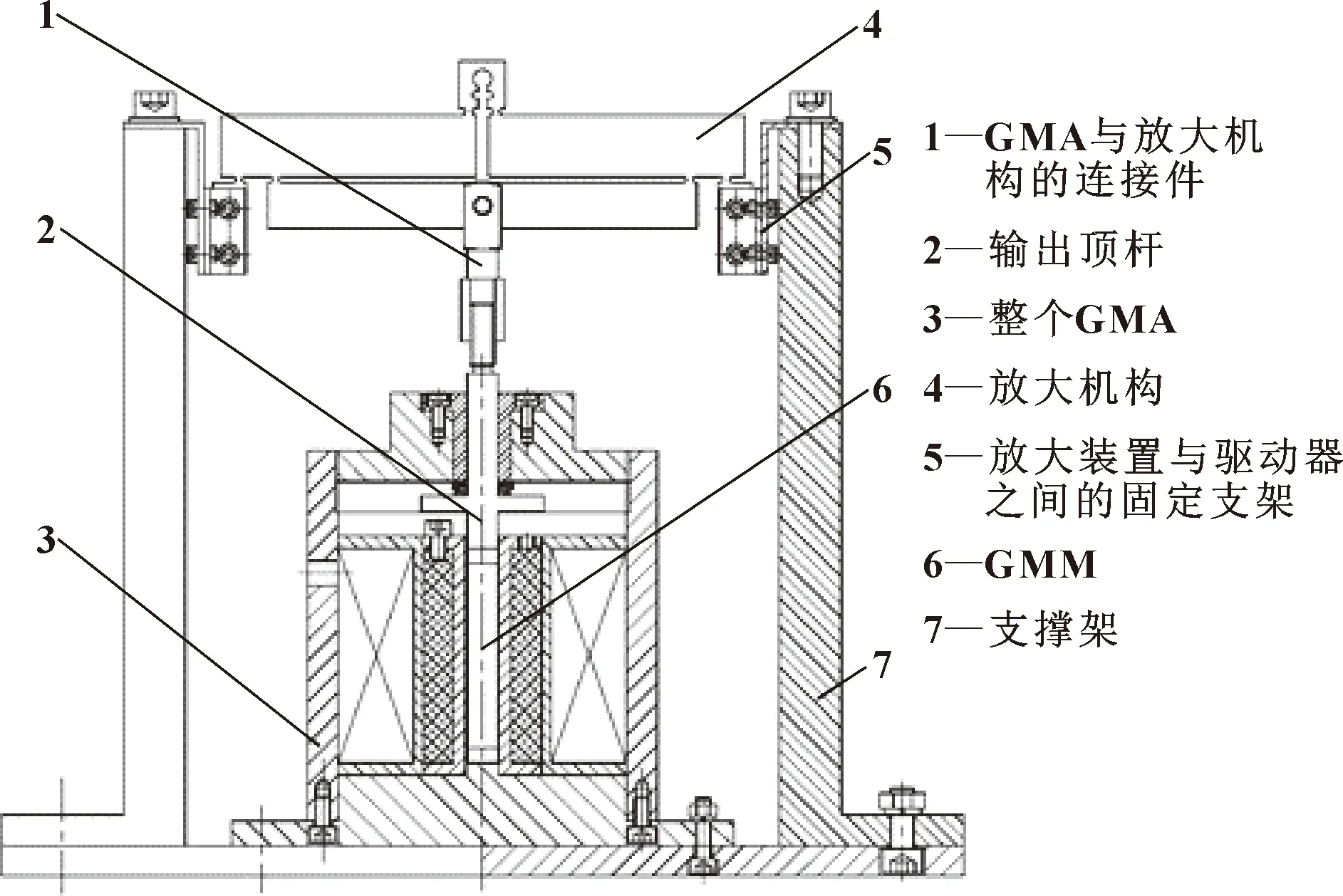
图6 整体装置安装结构
柔性铰链放大机构通过激光切割Al7075整体成型。安装时,放大机构两侧通过固定片连接在两侧支柱上,利用支架将传感器侧头竖直接触放大机构输出端,确保测头与放大机构在一条基准线上,传感器位移精度可达0.1 μm。实物安装与测试平台如图7所示。
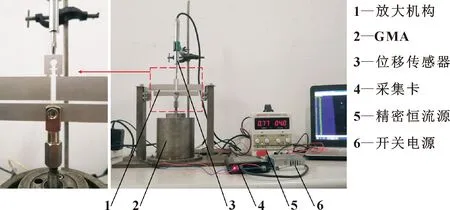
图7 实物安装与测试平台
调节激励电流改变放大机构的输入位移,可得出在不同预压力下的输出位移,如图8所示。可知:预压力为100 N时,整个装置输出位移较为稳定。

图8 电流-输出位移
图9所示为柔性铰链放大装置在GMA预压力100 N下性能测试的结果。

图9 预压力100 N下输出性能
由图9(a)可知:机构的整体静刚度为1.29 N/μm,与理论值误差为2.32%。根据图9(b)得出放大比为5.32,误差为1.87%,均在5%以内。结果表明:所设计的放大机构整体静刚度较好,位移损失较小。造成误差的原因是计算时仅考虑柔性铰链的切口变形,忽略了其余结构如力臂的变形,设备安装也存在一定偏差。
5 结论
在特殊工作情况下为放大超磁致伸缩驱动器的输出位移,设计了一种基于柔性铰链的超磁致伸缩微位移放大机构,对其位移放大比、等效静刚度进行了理论、仿真分析,并搭建了实验测试平台研究放大机构的输出性能。结果表明:所设计的放大机构在100 N预压力下输出能力最好,位移损失量较少,输出效率高,有效放大比达到5.32,误差均在合理范围内。研究结果为大行程超磁致伸缩驱动装置的研制提供了参考。
猜你喜欢
农业装备与车辆工程(2022年4期)2022-10-31
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
CHIP新电脑(2014年5期)2014-05-14