变转速变载荷工况下的齿轮智能故障诊断
2022-09-15 06:26庄敏李革丁科新徐观生
机床与液压 2022年12期
庄敏,李革,丁科新,徐观生
(1.杭州科技职业技术学院智能制造学院,浙江杭州 311402;2.浙江理工大学机械与自动控制学院,浙江杭州 310018)
0 前言
齿轮通常在各种旋转机械上起着至关重要的作用。然而,由于高负荷和恶劣的工作条件,齿轮容易出现故障。因此,齿轮健康状况监测具有重要的研究价值。由于振动信号提供了有关齿轮箱状况的丰富信息,因此长期以来,利用振动信号诊断齿轮故障一直是相关领域研究的主要方向。
谱峭度法是目前较为主流的基于振动分析的旋转机械故障诊断方法,采用峭度图(Kurtogram)来显示每个中心频率和窗口长度的谱峭度值。WANG等提出了基于快速峭度图(Fast Kurtogram,FK)的旋转机械故障诊断方法。林辉翼等提出了FK与全矢谱结合的轴承故障诊断方法。然而,工业设备通常是一套复杂的系统,齿轮故障特征通常被较大的非高斯噪声(如大随机脉冲)覆盖,使得故障频率在频谱中与离散分量相比不占主导地位,这直接降低了FK的可靠性。
近期,一种被称为自相关谱峭度图(Autogram)的新方法通过最大重叠离散小波包变换来解决上述问题。AFIA 等利用自相关谱峭度图消除了振动信号中的脉冲噪声,改善了与故障特征相关的周期分量。但是,该方法虽然能够对故障信号进行较好的感知,但不能提供任何有关其性质的决策信息。特别是当齿轮故障具有相同的频率特征时,齿轮故障的分类将变得十分困难。此外,旋转机器转速和载荷的变化将产生显著的影响,直接导致错误的检测结果。
因此,为了解决上述问题,作者尝试将最大重叠离散小波包变换与径向基函数(Radial Basis Function,RBF)神经网络相结合,提出一种新的智能自动齿轮故障诊断技术。实验结果表明:本文作者提出的方法即使在变转速、变载荷工况下也能对不同类型的齿轮故障特征进行准确的检测和分类。
1 齿轮智能故障诊断方法设计
1.1 自相关原理分析
自相关是一种用于时间序列分析的数学工具,可以将信号与自身的延迟版本进行比较,以检测和改善与齿轮故障直接相关的周期性脉冲。对于连续信号,其平方包络的自相关计算方式如下:

(1)
式中:为数据集的长度;为延迟长度;为延迟因子,=,为采样频率。
1.2 最大重叠离散小波包变换基本原理
最大重叠离散小波包变换通过引入插值来保证每个小波子带生成的小波系数的长度与原始序列的长度相同。
对于离散时间序列{(),=0,1,…,-1},级的第个子带的小波系数,,为

(2)
式中:为指数因子,=0,1,…,2-1。

(3)

最大重叠离散小波包变换可以将振动信号分解为多个频带和称为节点的中心频率。针对每个节点的平方包络计算自相关。接着,测量上一步产生信号的峭度值,峭度值计算方式如下:

(4)
与FK类似,每个节点的峭度值显示在一个彩色图中,其中色度与峭度值成比例,而分解层数和最大重叠离散小波包变换频率分别显示在纵轴和横轴上。
最后,对峰度最大的平方包络进行傅里叶变换,以提取故障特征。
1.3 RBF神经网络原理
RBF神经网络具有结构简单、非线性映射能力强、训练效率高等优点,被认为是目前应用最广泛的人工神经网络结构之一。RBF使用高斯函数作为激活函数,其前馈结构由3层组成:输入层、隐藏层和输出层,如图1所示。

图1 人工神经网络结构
输出节点为求和运算,隐藏节点为径向基函数单元,每个节点与上一层的每个节点完全相连。隐藏层中的高斯激活函数会对输入做出响应,产生输出神经元,从而提高了网络的性能,减少了训练时间。隐藏层中第个神经元对输入的响应如下所示:

(5)
式中:为隐藏层中第个神经元的输出;为隐藏层中第个神经元的中心;为高斯函数的扩频系数;为输入层第个神经元的输入;为隐藏层的节点数。
输出层可以表示为

(6)
式中:为从第个隐藏节点到第个输出节点的权重;为输出层的节点数。
与反向传播网络相比,RBF网络的优点是使用了高斯激活函数。因此,只有少数神经元具有非零响应,仅对这些活跃神经元的权值进行了修改,从而减少了训练时间。
1.4 所提故障诊断方法
所提特征提取方法首先使用最大重叠离散小波包变换,将复杂信号分解为频带和称为节点的中心频率。最大重叠离散小波包变换提供了一个统一的频率带宽,并允许在不丢失任何信息的情况下重建原始信号。针对先前获得的每个节点计算自相关。自相关可以改善信号中与齿轮故障显著相关的重复模式,并去除信号中不相关的成分,即噪声和随机脉冲内容。最后,计算每个自相关的峭度值,以确定周期脉冲的峰值,即在每个分解层次上定位峭度值最大的节点。因此,由前几步得到的特征向量与齿轮故障有直接关系。这些向量是RBF网络的输入,用于识别和分类几种齿轮故障。
所提故障诊断方法分为特征提取和特征分类两个主要过程:(1)首先将每个振动信号划分为20个数据集。然后,将上述特征提取方法应用于每个数据集,分解层次为6,从而获得了16种工况下每个齿轮状态的总共16个特征矩阵(7×20),包括载荷和转速的变化;(2)利用RBF神经网络进行特征分类。所提故障诊断方法的流程如图2所示。
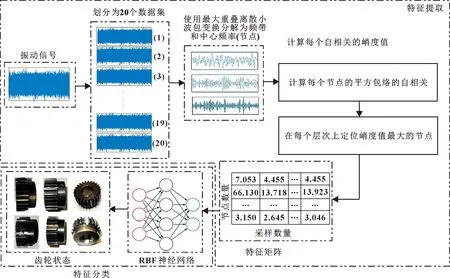
图2 所提故障诊断方法的流程
2 试验结果与分析
2.1 试验设置
此研究采用齿轮比为25/56的减速器作为故障诊断试验台,直齿轮传动试验台如图3所示。

图3 直齿轮传动试验台
图3所示试验台中Maxon E-60型直流电机的额定转速为3 600 r/min,EL40A2000型光电编码器的分辨率为17 b。输出轴与磁粉制动器相连,产生不同的阻力力矩。
为了验证所提方法的有效性,在试验过程中考虑了6个具有不同故障的小齿轮,包括无故障、齿根裂纹、整体断齿、局部断齿、缺齿和一般表面磨损。6种齿轮的状态如图4所示。
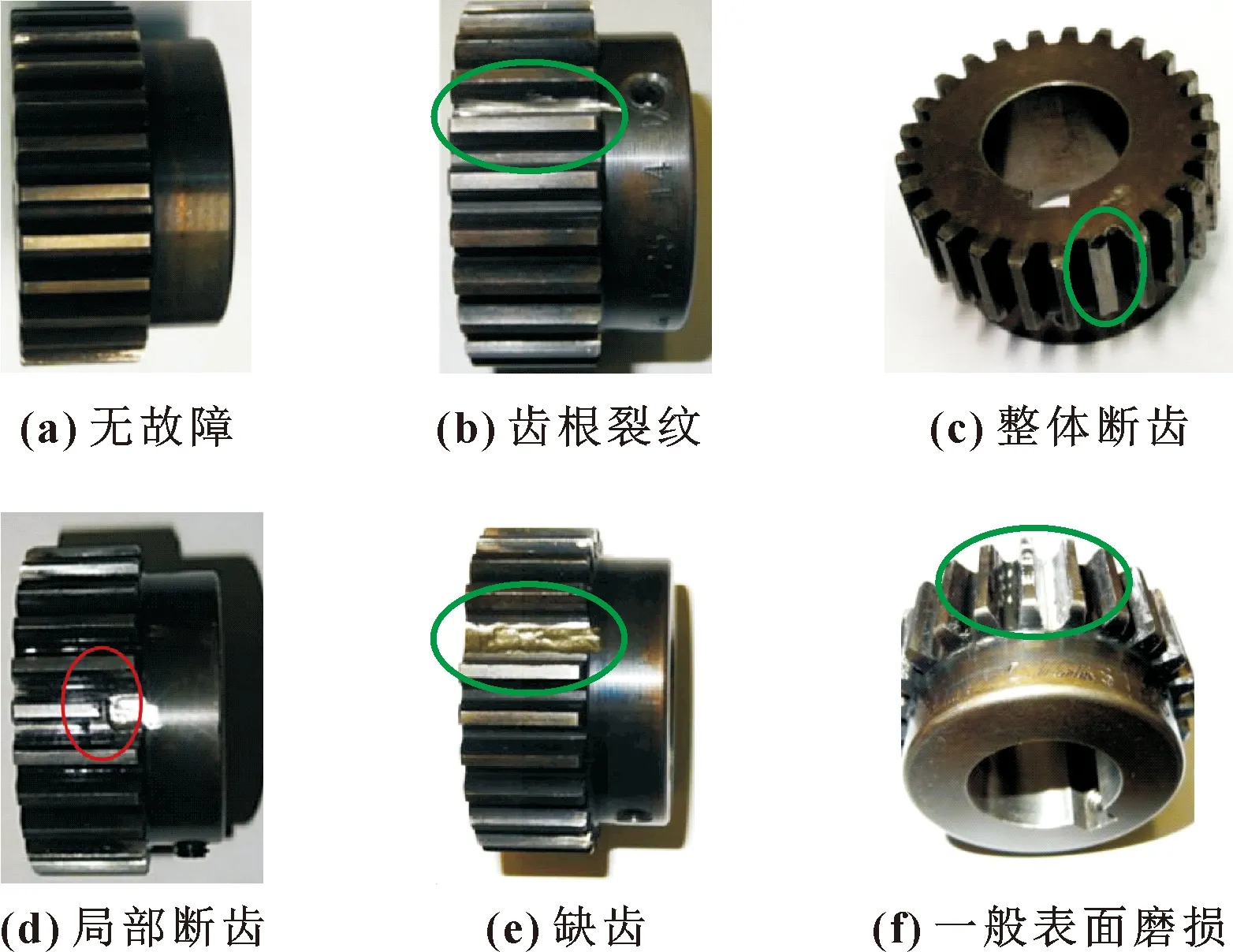
图4 6种齿轮的状态
两个用于记录振动信号的加速度计(灵敏度为100 mV/)沿径向安装在输出轴的轴承壳上,一个垂直,一个水平。加速度计的采样频率为125 kHz,抗混叠滤波器截止频率为27 kHz,采集时间为30 s。在不同载荷和不同转速下,对6个齿轮的加速度计信号进行了收集,获得了试验台的工况条件如表1所示。
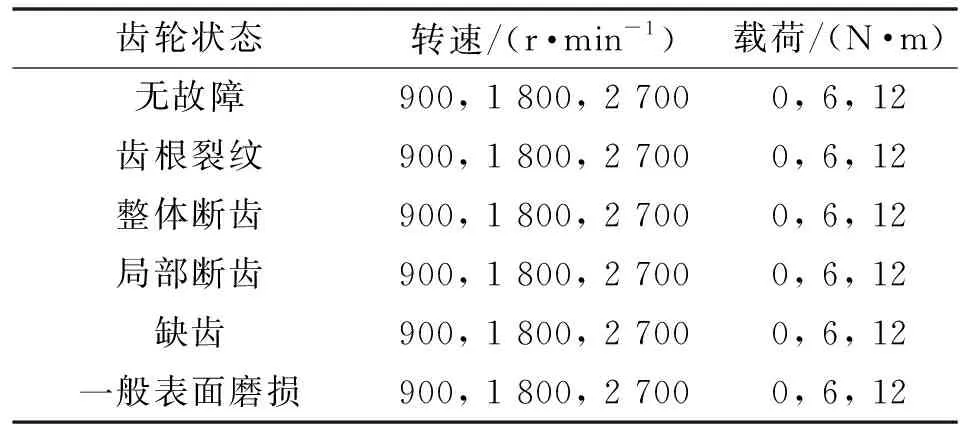
表1 试验台的工况条件
2.2 特征分析
在1 800 r/min转速、12 N·m载荷下,实施了所提故障诊断方法的特征提取过程,获得了5个不同齿轮状态的自相关谱峭度图如图5所示。
从图5可以看出:最大重叠离散小波包变换获得的自相关谱峭度图可以较好地检测齿轮故障的迹象。为了验证特征提取方法的有效性,提取了在5种不同工作模式(900 r/min和0 N·m、900 r/min和6 N·m、900 r/min和12 N·m、1 800 r/min和12 N·m、2 700 r/min和6 N·m)下5种齿轮故障的峭度值如图6所示。
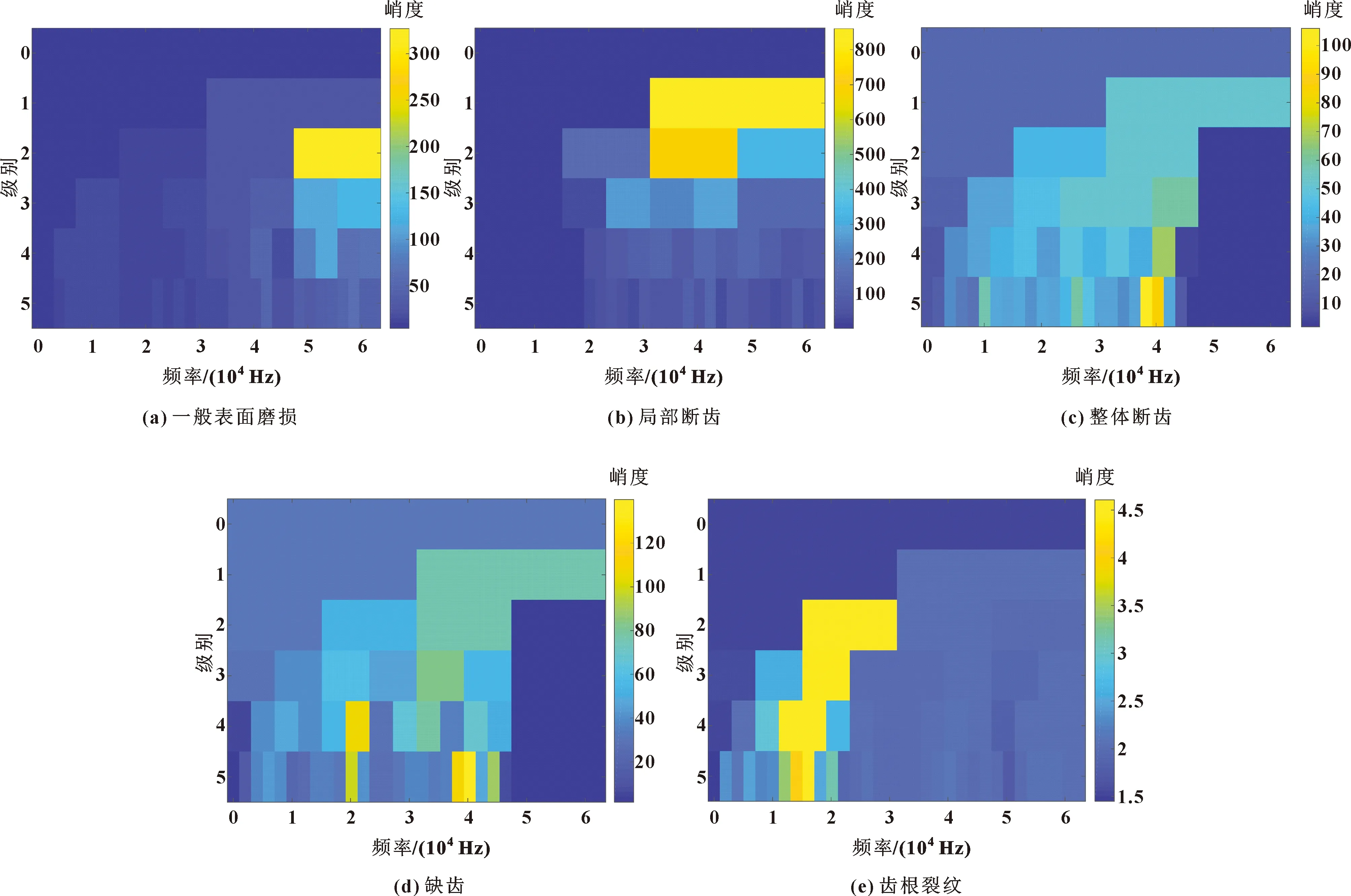
图5 5个不同齿轮状态的自相关谱峭度
从图6可以看出:在所有5种工作模式下,这5种齿轮故障之间几乎没有重叠。实验结果表明,最大重叠离散小波包变换能够成功地对几种类型的齿轮缺陷进行特征提取。
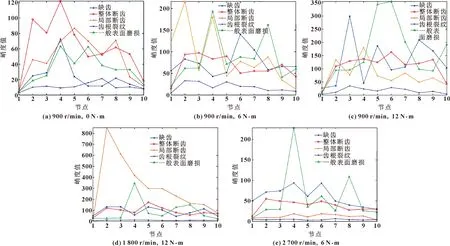
图6 5种齿轮故障的峭度值
2.3 故障诊断结果
在上述特征分析后,使用获得的故障特征向量作为RBF神经网络的输入,对16种运行模式的6种齿轮状态进行识别和分类。数据集分为训练数据集(70%)和测试数据集(30%),以测试所有齿轮状态的有效性。输入层的节点表示特征提取向量,而输出节点的数量在1~6之间变化,表示每个齿轮状态。
为了评估所提方法的鲁棒性,采用了另一种分类技术,即多层感知器(Multilayer Perceptron,MLP)神经网络进行对比分析。两种分类技术的性能对比如图7所示。
从图7可以看出:RBF在1 400次迭代时表现出1.032 258×10的优异性能;而在相同迭代次数的情况下,MLP表现出3.320 64×10的较差性能。因此,RBF在分类精度方面优于MLP,验证了所提故障诊断方法的可行性和有效性。以缺齿故障为例,RBF的分类结果如表2所示。
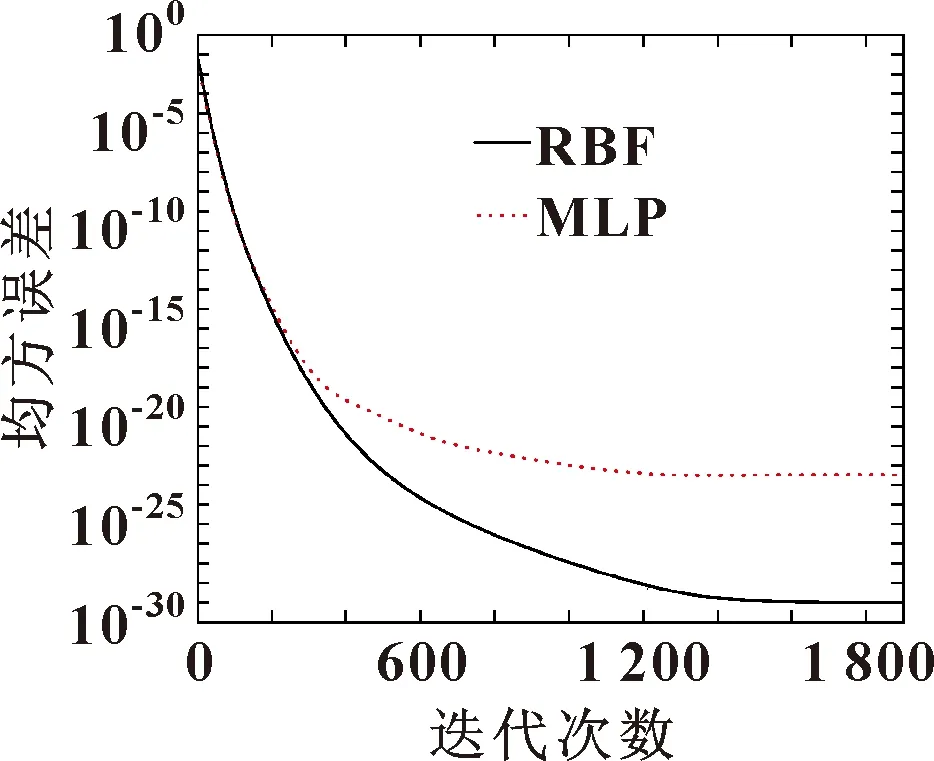
图7 两种分类技术的性能对比
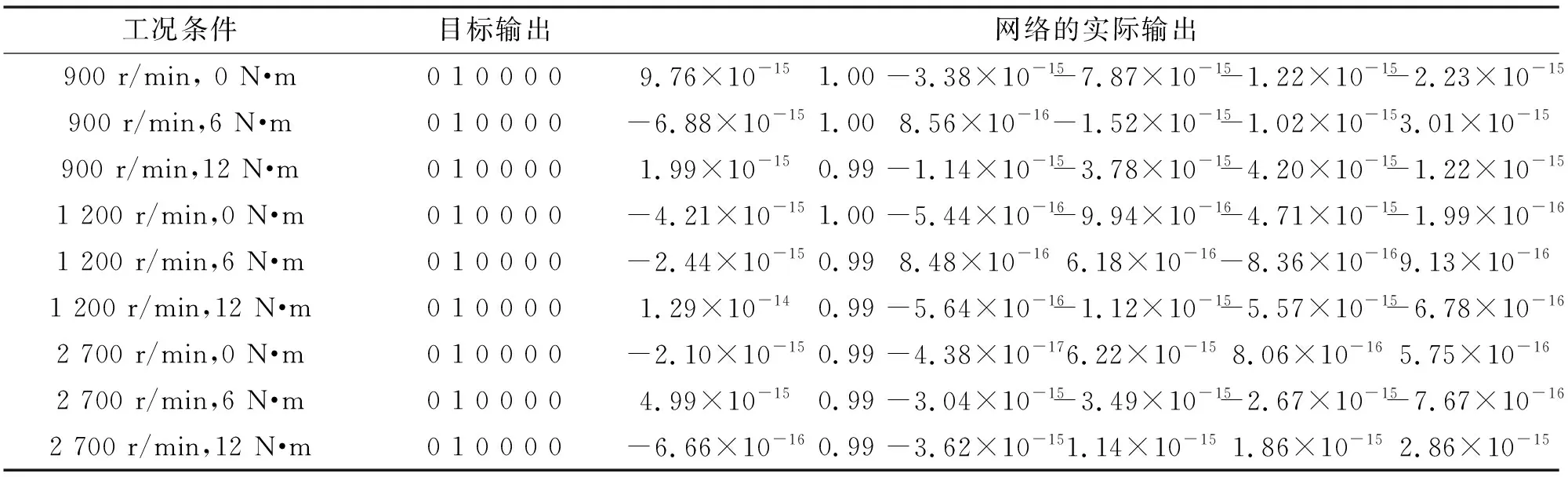
表2 RBF的分类结果(缺齿)
从表2可以看出,在嘈杂的环境和16种不同的工况下,RBF的实际输出满足目标输出,每种齿轮状态的分类结果均为100%正确率,证实了该技术的有效性,也就说在变转速变载荷工况下可以对齿轮故障进行准确分类和识别。
3 结论
通过RBF神经网络结合最大重叠离散小波包变换,设计出一种新的自动齿轮故障诊断技术。利用5种故障类型齿轮箱的实验数据,验证了该方法在各种工况下的准确性。实验结果表明:最大重叠离散小波包变换与RBF相结合是一种可靠的方法,即使在不同工况下,对齿轮箱故障分类也有较高的准确率。后续将针对同时检测和定位多个齿轮故障开展进行进一步的研究,并尝试加速度计和声学麦克风等多种传感器的组合,以进行更准确的机器状态监测。
猜你喜欢
航空学报(2022年9期)2022-10-14
山西电子技术(2022年1期)2022-02-28
内燃机工程(2021年6期)2021-12-10
成都信息工程大学学报(2021年1期)2021-07-22
铁道机车车辆(2020年2期)2020-05-20
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
装甲兵工程学院学报(2017年4期)2017-09-16
军事交通学院学报(2017年5期)2017-06-05