
基于析取图的铁水联运港口设备协同调度方法
2022-09-15 09:02刘文茜朱晓宁迟美燕
铁道学报 2022年8期
刘文茜,朱晓宁,王 力,迟美燕,闫 伟
(1.北京交通大学 交通运输学院, 北京 100044;2.中国国家铁路集团有限公司 办公厅, 北京 100844)
作为综合交通运输体系中的重要运输组织形式,货物多式联运在国际贸易中逐渐表现出优势和特色。从具有广阔内陆腹地的国家或区域看,货物多式联运体系建设的关键在于“铁-水”联运。2019年国家发改委在《关于加快推进铁路专用线建设的指导意见》中明确提出:至2025年,沿海主要港口和长江沿线主要港口全部实现铁路入港。这一政策不仅为港口吸引了更多箱流,同时也增加了设备作业量,使得港口集装箱作业更为复杂。在此背景下,需要依据现有港口资源,调整集装箱集疏运组织及设备作业调度方案,以促进港口铁路作业与水运作业的融合。
铁路作业区作为港口衔接铁路运输与水路运输的关键区域,其装卸作业组织是支撑铁水联运港口集装箱快速转运的重要环节,这对作业过程涉及的多项设备调度作业计划的配合和衔接提出了较高要求。目前许多学者对这类问题展开了研究,但多集中于单作业模式下的港口设备调度优化,对联运模式下的设备协同作业优化研究相对较少,且优化目标较为单一[1]。Chen等[2]通过约束规划模型和三阶段算法优化集装箱在码头前沿和堆场之间的装卸作业,同时考虑任务作业顺序优先级及集卡的走行路径。Lu等[3]考虑集卡走行速度变化及场吊吊具升降时间,设计基于排队思想的粒子群优化算法求解岸桥-集卡-场吊协同调度问题,但没有考虑集卡的具体走行路径。Assadipour等[4]提出对场桥和岸桥协同调度的分析框架,并通过设备的协同调度有效缩短了集装箱周转时间。Kaveshgar等[5]基于混合流水车间思想,针对进口箱卸箱过程,研究岸侧装卸、转运设备两阶段作业调度问题,同时考虑集装箱作业顺序优先级约束、交叉干扰和安全距离约束。Yang等[6]着眼于自动化场站,以最小化作业完工时间为目标,建立双层规划模型,上层对岸桥-AGV-场桥之间的协同作业进行决策,下层实现AGV路径规划,防止拥堵现象。Yue等[7]从客户满意度和设备作业效率角度出发,通过建立两阶段多目标混合整数规划模型优化集装箱码头设备配置及调度联合作业问题,以提升码头竞争力。张思等[8]针对设备效率差异,研究不确定因素下的岸桥-集卡协同调度,并提出粒子群算法与禁忌搜索相结合的混合算法进行求解。以铁路集装箱作业场站为背景,王力等[9]以最小化作业完工时间为目标,建立轨道门吊调度优化模型,有效缩短了集装箱装卸作业时间。Chen等[10]基于“时-空-状态”网,建立自动化轨道门吊和全自动导轨车协同调度模型,目标是车辆周转时间最小。然而,目前对铁路入港模式下联运港口铁路作业区设备协同调度问题的研究较少,常祎妹等[11]针对“车船直取”集装箱作业流程,在考虑设备运行速度的变化及设备作业安全距离约束的基础上,优化相关设备的协同作业。Yan等[12]分析存在缓存区的港口铁路作业区和堆场之间的作业过程,以轨道门吊为主,集卡和堆场正面吊为辅,建立3种设备的集成调度优化模型,将最早可用设备策略与遗传算法相结合求解问题。
总之,现有对集装箱装卸作业的优化研究大多针对铁路集装箱场站、港口堆场、港口岸侧等单一运输方式下的多设备协同调度问题,未能反映铁水联运模式下的铁路作业与港口作业的衔接关系。除此以外,既有研究优化目标较为单一,且多对问题进行了简化,未充分考虑可能影响集装箱装卸转运作业的多种现实约束。本文重点关注将铁路线引入码头后方后,铁路与水运两个运输系统融合后的节点作业优化,考虑实际作业中集装箱作业顺序优先级约束,研究混合装卸模式下铁路作业区轨道门吊、集卡、场吊协同调度多目标优化问题,并进一步规划集卡在各区域之间的走行。
1 问题描述与建模
1.1 影响因素分析及问题界定
铁路入港模式下,列车装卸作业的引入对港口作业组织、作业调度等提出了新要求,港口的资源分配与利用也影响着铁水联运箱转运作业效率,港口作业调度人员需要分析和界定关键作业环节相关影响因素。
(1)货物到达率及转运数量。出口方向,港口作业调度人员能够从铁路车站提前获取到港列车信息,因此铁路箱到达时刻已知,且较为稳定;进口方向,港口作业调度人员依据集装箱到港情况提报运输计划,按照取送车情况安排转运方案。因此,在较短的给定时间周期内,依据转运方案需要进行转运的联运箱方向、堆存位置、数量等为本文研究的多阶段设备协同调度问题的输入,进而对设备作业任务的执行顺序及作业时间进行决策。
(2)堆场面积及数量。堆场面积及数量决定了港口能容纳转运集装箱的数量,在一般港口作业组织中,需要对集装箱按方向、按作业类型进行箱位指派,确保其堆存位置便于作业且满足堆场作业能力,即堆场空间资源分配问题。在既定布局下,集装箱堆存位置作为本文研究问题的输入,在此基础上对设备的作业序列和任务分配进行决策,减少设备的空驶距离。
(3)设备的分配与调度。联运箱的转运在作业层面涉及列车装卸设备、水平运输设备以及堆场作业设备,三者的作业能力共同影响联运箱的转运效率,需要对调度方案进行协同决策,使任务各阶段作业紧密衔接,减少不必要的等待时间。在实际作业中,设备可能出现故障等不确定情形,通常解决方法是在已有作业方案的基础上进行重调度,保证作业的顺利进行。本文根据集装箱转运需求,制定各阶段设备初始协同作业计划,暂不考虑设备故障情形下的重调度问题。
港口各区域主要作业组织关系见图1。

图1 港口各区域主要作业组织关系图
基于以上分析,货物到达率及转运数量,堆场面积及数量对本文研究的多阶段设备协同调度问题不产生直接影响。本文着重围绕铁水联运箱“卸车-堆存”和“提箱-装车”需求,根据确定的列车装卸车任务,对一定周期内需转运的集装箱进行调度,确定各阶段作业设备的任务执行顺序和作业时间,从调度作业层面优化设备的使用。港口的设备协同调度问题与混合流水车间问题相似,具有多工序、多机并行的特点,其主要区别为:

图2 集装箱码头铁路作业区与堆场布置示意
(1)时间差异性。首先,任务作业时间具有差异性,某一设备处理同一类型任务的作业时间不同,取决于该任务的存储位置及目标位置;其次,设备衔接时间具有差异性,取决于任务作业类型。
(2)接续紧密性。各阶段作业之间不存在缓冲区,相互接续的两个作业设备需要同时到达任务取送点,此时才能结束上一阶段作业并开始下一步作业。
(3)双向作业性。三阶段作业具有正向和反向两种作业流程约束且同时进行,两种方向的作业流程存在严格的先后关系,即进口方向遵循“堆场提箱-水平运输-铁路区装车”的流程,出口方向遵循“铁路区卸车-水平运输-堆场存箱”的流程。
1.2 问题描述
铁路装卸线引入码头后方后,港口集装箱箱流作业类型和设备作业调度都将发生改变,增加了集装箱装卸、转运作业组织的复杂度。考虑现实中港口堆场的既有资源和配置,铁路箱将与公路箱共用堆场设备资源,即不另外设置铁路堆场。铁路出口箱随列车到达港口铁路作业区,经由轨道门吊卸至内部集卡,集卡通过短驳运输将集装箱运送到堆场出口箱区,再由场吊将集装箱堆存至指定位置,进口箱作业过程相反。整个作业过程涉及多个区域轨道门吊、集卡、进口区场吊和出口区场吊等多项设备,若单独考虑每个作业区设备的调度作业,即使轨道门吊、场吊分别实现作业时间最短,能够保证作业区域自身的效率,然而各阶段作业之间缺乏配合,若集装箱完成卸车作业后到达堆场,但场吊不执行该箱的堆存作业,则会引起任务冲突,严重时可能产生死锁现象。除此以外,集卡负责各区域之间的短驳,由于不设置区域间缓冲区,集卡任务作业顺序同样影响轨道门吊和场吊的调度,若集装箱完成装卸作业时未安排集卡接续,会引起设备长时间占用,造成资源浪费,同时影响后续任务的执行。因此,港口需要根据铁路装卸线引入后箱流作业类型的增加和流程的变化,对整个作业过程涉及的多项作业设备进行协同调度,保证港口作业效率。
因此,本文以最小化作业完工时间以及设备空驶时间为优化目标,调整轨道门吊、集卡、场吊各设备的集装箱任务执行顺序以及集卡在各区域的接续方案。
本问题涉及的港口主要作业区域布置见图2,在混合装卸作业模式下,即列车上某一位置出口箱卸下后,无需等待整列车卸空,轨道门吊可进行进口箱的装车作业,因此列车同一位置上装卸作业任务可能发生冲突。如图2所示,进口箱3、5、6的目标车厢分别装有出口箱1、2、4,必须先将对应位置出口箱卸下才能进行进口箱的装车作业。另外,在集装箱堆场进口箱区中,位于上层的集装箱必须先于下层集装箱提走,否则将产生翻箱作业,如箱3、5;出口箱区目标箱位在底层的集装箱必须先于上层完成堆存作业,如箱1、2。综上,在多设备协同作业过程中可能产生多种矛盾冲突的情况,需要分别做出处理。
(1)装卸作业顺序冲突
解决作业顺序冲突的方法主要有两种:一是规定作业顺序优先级,二是设置交接缓冲区。若在铁路作业区设置缓冲区用于暂存卸下的出口箱,则会增加轨道门吊作业任务,产生额外的时间消耗,本文通过设置集装箱作业顺序优先级来满足部分集装箱装卸作业的先后要求。
(2)任务死锁现象
各项设备作业方案之间需要高度配合,避免因任务冲突无设备接续而产生死锁现象。而在联运作业中,铁路作业区具有较强的时间约束性,因此以铁路作业区轨道门吊为核心设备,以其作业序列为主,进一步协调集卡和场吊的作业。
本文中各轨道门吊、场吊负责固定的作业区域,故对应设备承担的任务已知,通过优化各设备作业任务的执行顺序可减少任务之间的衔接时间,各任务作业距离通过曼哈顿距离表示。集卡的行驶时间与作业类型密切相关,若为集卡分配“重去重回”的任务,如集卡在堆场完成交箱后直接装载进口集装箱前往铁路作业区,则能够减少该车辆的空驶距离,从而提高集卡利用率,因此需要为集卡合理分配任务并确定集卡路径。
1.3 模型假设
为了使模型更合理,本文提出以下假设:
(1)集装箱在列车、堆场的位置已知。
(2)轨道门吊、场吊所分配的集装箱装卸作业任务对象已知,但各设备所负责的集装箱装卸作业任务的执行顺序未知。
(3)进口箱和出口箱堆存在不同箱区。
(4)不考虑翻箱作业。
(5)一半集卡初始位置在铁路作业区,一半在堆场。
1.4 符号定义
符号及定义见表1。
1.5 数学模型
根据1.2节的问题描述,建立铁水联运设备协同调度模型,优化场站各设备作业序列及任务作业时间。
(1)目标函数

表1 符号及定义
作业效率是场站运营管理的关注重点,提高作业效率能够加快集装箱的在站中转速度,减少在站停留时间。同时,在相同作业完工时间下,不同作业设备的利用率也有所差异。两个任务接续时,完成当前任务后前往距离较近的下一任务可减少空驶距离,提高设备利用率。因此从作业效率和设备利用率两方面开展多目标优化,最小化最晚完工时刻和设备空驶时间,有助于提升作业衔接的紧密程度,提高港口海铁联运的作业水平。目标函数为
(1)
(2)
minf=α1f1+α2f2
(3)
式(1)从场站作业效率的角度最小化作业最晚完工时刻,即轨道门吊结束作业的时刻或者场吊结束作业的时刻;式(2)从场站设备利用率的角度最小化设备总空驶时间,时间由轨道门吊、集卡、场吊3种设备在任务接续时的空驶距离和移动速度计算得到;目标函数为式(3),通过比例系数调整两个目标之间的权重。
(2)约束条件
铁水联运设备协同调度问题受诸多约束限制,在作业流程上,相邻两道工序的作业设备必须同时到达任务交接点才能够开始或结束各自的作业,对于出口任务和进口任务,两者流程相反。对于任务本身的作业,必须满足设备处理时间,以及设备在任务间移动的时间需求。从设备的作业序列来看,其负责的任务必须满足接续关系,即后一任务必须在前一任务结束后才能开始,保证作业的连贯性。
铁路作业区轨道门吊作业约束为
(4)
(5)
(6)
∀i′∈Jg∩U∀g∈G
(7)
(8)

(9)

(10)
(11)
式(4)、式(5)定义了轨道门吊对任务的作业开始时刻,对于每个出口任务,轨道门吊为第一道工序,则该任务作业开始时刻不得早于门吊结束前一任务的时刻加上移动至该任务起点的衔接时间;对于每个进口任务,轨道门吊为第三道工序,则该任务作业开始时刻不得早于集卡(第二道工序)将其运到交接区的时间。式(6)、式(7)约束了轨道门吊对任务的结束时刻,式(6)表示其结束时刻不早于开始时刻加上移动时间及装卸作业时间,式(7)表示对于出口任务,轨道门吊必须等集卡接走该任务后才能结束。式(8)表示轨道门吊最晚完工时刻,即所有轨道门吊中最后一个结束任务的时刻。对于已知任务分配的轨道门吊,式(9)表示每个任务有且只能有某一个后续任务,且只有一个起始任务和结束任务。式(10)表示每个任务有且只能有某一个前续任务,且只有一个起始任务和结束任务。式(11)表示任意两个任务之间只能存在一种作业先后顺序,即不可能存在任务i在任务i′之前且任务i在任务i′之后的情况。
转运设备集卡作业约束为
(12)
(13)
(14)
(15)
(16)
(17)

∀i′∈L∀k∈K
(18)

∀i′∈U∀k∈K
(19)
(20)
(21)
(22)
(23)
(24)
(25)
式(12)规定集卡当前任务的起点到达时刻,即集卡上一任务结束时刻加上行驶到当前任务点的时间。式(13)~式(15)定义集卡对任务的作业开始时刻,对于每个出口任务,不得早于轨道门吊与其交接该任务的时刻,对于每个进口任务,不得早于场吊与其交接该任务的时刻,且满足集卡到达后装载时间需要。式(16)表示集卡当前任务的终点到达时刻需满足运输时间要求。式(17)~式(19)约束集卡对任务的结束时刻,即对于出口任务,为场吊将该任务取走的时刻,对于进口任务,为轨道门吊将该任务取走的时刻。式(20)表示每个任务有且只能有一个后续任务,且由一个集卡负责。式(21)表示每个任务有且只能有一个前续任务,且由一个集卡负责。式(22)、式(23)保证每个集卡有且只能有一个起始任务和一个结束任务。式(24)为集卡连续作业约束。式(25)表示任意两个任务之间只能存在一种作业先后顺序,即不可能存在任务i在任务i′之前且任务i在任务i′之后的情况。
堆场场吊作业约束为
(26)
(27)

(28)
∀i′∈Jg∩L∀y∈Y
(29)
(30)
(31)
(32)
(33)
式(26)、式(27)定义场吊对任务的作业开始时刻,对于每个进口任务,场吊为第一道工序,则该任务作业开始时刻不得早于场吊结束前一任务的时刻加上移动至该任务起点的衔接时间;对于每个出口任务,场吊为第三道工序,该任务作业开始时刻不得早于集卡(第二道工序)将集装箱运到交接区的时刻。式(28)、式(29)约束场吊对任务的结束时刻,式(28)表示其结束时刻不早于开始时刻加上移动时间及装卸作业时间,式(29)表示对于进口任务,场吊必须等集卡接走该任务后才能结束。式(30)表示场吊最晚完工时刻,即所有场吊中最后一个结束任务的时刻。对于已知任务分配的场吊,式(31)表示每个任务有且只能有某一个后续任务,且只有一个起始任务和结束任务。式(32)表示每个任务有且只能有某一个前续任务,且只有一个起始任务和结束任务。式(33)表示任意两个任务之间只能存在一种作业先后顺序,即不可能存在任务i在任务i′之前且任务i在任务i′之后的情况。
任务作业顺序优先级约束为
(34)
(35)
(36)
式(34)表示轨道门吊必须先将列车上某位置出口箱卸下才能装载对应位置进口箱。式(35)表示集卡运输的列车某位置上进口箱必须在其他集卡取走该位置出口箱后才能交接。式(36)表示堆场作业中场吊必须先将上层集装箱取走才能提取下层,堆存作业则相反。
2 求解算法
港口的多设备协同调度问题具有多工序、多机并行的特点,其实质与生产中的混合流水车间调度问题相似,属于为NP-hard问题[5],无法在多项式时间内求出精确结果,需要采用启发式算法求解。目前遗传算法和禁忌搜索算法已被广泛使用在生产调度问题中[1],考虑本问题与混合流水车间问题的区别,以及对多目标同时进行优化的特点,本文将禁忌搜索的思想与析取图特点相结合,提出变邻域禁忌搜索算法,设计4种基于析取图的邻域算子,能够适应本问题特点,有效避免迂回搜索,实现全局优化。
2.1 初始可行解
(1)初始解生成
用3个序列分别表示轨道门吊、集卡和场吊的作业分配和顺序,各轨道门吊和场吊规定作业区域内负责的任务集已知,只需对其作业执行顺序进行决策。在本文研究场景下,设备之间需要密切配合,且各作业之间存在作业执行顺序优先级约束,若采用随机方法生成初始解,会产生大量不可行解,故以轨道门吊为核心设备生成初始作业序列,再通过启发式规则依次确定场吊和集卡的作业序列,可避免任务矛盾或冲突的情形,6个集装箱初始解生成示例见图3。

图3 初始解生成步骤
初始解生成步骤为
Step1根据轨道门吊g的已知任务分配,对其负责的出口任务i∈Jg∩U随机生成部分作业序列,共计m1个部分序列。
Step2对各轨道门吊剩余进口任务i′∈Jg∩L按照执行顺序优先级(i,i′)∈Φ依次随机选择符合要求的位置执行插入操作,形成轨道门吊完整作业序列βg。
Step3根据各轨道门吊作业序列βg中任务顺序及箱区依次确定各场吊作业序列γy,若属于同一场吊的任务i,i′∈Jy对应不同轨道门吊的作业序号相同,则进行随机排序,对于不满足作业执行顺序优先级(i,i′)∈Ψ要求的任务组进行位置交换操作,若此任务组对应的轨道门吊相同i,i′∈Jg,则同时交换其轨道门吊作业位置。
Step4根据轨道门吊作业序列βg和场吊作业序列γy依次将任务分配给集卡,生成集卡作业序列ωk。
(2)构建析取图(Disjunctive Graph)


图4 6个集装箱任务析取图示例
2.2 邻域算子2.2.1 构建邻域
在关键路径上进行邻域操作,即调整当前最晚结束作业的任务路径,能够更容易改变最优解,并且减小问题搜索空间,提高算法寻优效率。在本问题中,各阶段设备作业序列之间具有较强的关联性,以轨道门吊为核心设备,对其作业序列采用4种邻域结构生成候选解,即通过调整设备作业任务的执行顺序改变任务间接续时间,从而优化最晚完工时刻。
(1)移动操作
①随机选择某设备关键块(作业序列片段)的某个任务,将其移动至该片段其他任意位置。4种邻域结构示例见图5,原关键路径a—abcd—d经操作后变为a—acbd—d。
②随机选择某设备关键块(作业序列片段)的某个任务,将其移动至同一设备非关键路径(其他作业片段)某一位置。如图5所示,原关键路径a—abcd—d经操作后变为a—abd—d。

图5 4种邻域结构示例
(2)交换操作
①随机交换某设备关键块(作业序列片段)内任意两个任务。如图5所示,原关键路径a—abcd—d经操作后变为a—adcb—d。
②随机选择某设备关键块(作业序列片段)内的某个任务,将该任务与同一设备其他作业片段上的随机一项任务进行作业顺序交换。如图5所示,原关键路径a—abcd—d经操作后变为a—abed—d。
针对以上邻域操作,可进一步确定新的集卡和场吊作业序列,删除图G中对应任务连接的全部析取弧,重新构建图G′没有环路且满足作业顺序优先级约束则操作成功,否则重新执行邻域操作。根据新析取图计算候选解的评价值。
2.2.2 选择策略
本文采用第一个改进解优先策略(First Improved Strategy)进行下一次迭代基础解的选择,即依次对候选解进行估值,当产生第一个改进解时,即目标函数优于当前内部迭代基础解时,则选择该改进解为本次搜索的最优解进入下一次迭代,在禁忌表中记录解的移动。若候选解数量达到候选集合长度,则选择当前候选集合中的最优解作为下一次迭代的开始。
2.3 禁忌表
(1)禁忌对象
禁忌对象需要有效表示邻解的产生过程,且不能过于复杂。对于移动操作,以(i,m,a,b)记录一次动作,表示将任务i从设备m的a位置移动到b位置;对于交换操作,以(m,i,i′) 记录一次动作,与(m,i′,i)意义相同,即交换设备m的任务i与任务i′。对于每个周期的最优动作,依次将其加入禁忌表,当禁忌表满足长度要求时,则按照先进先出规则(FIFO)更新禁忌表,即删除最先进入队列的禁忌对象,再在队尾加入新产生的禁忌对象。
(2)禁忌长度
禁忌表的长度用来限制每个移动禁止出现的周期,长度过小会导致搜索陷入循环;反之,长度过大则会过度限制搜索空间,故本文采用动态禁忌长度来解决这个问题,禁忌长度即为当前邻域搜索开始时关键路径长度的一半。
(3)特赦准则
当某个禁忌对象重复出现时,若该移动产生的新解优于历史最优解,则满足特赦准则,接受该解,并将该对象从禁忌表当前位置移动到队尾。
算法总体流程见图6。
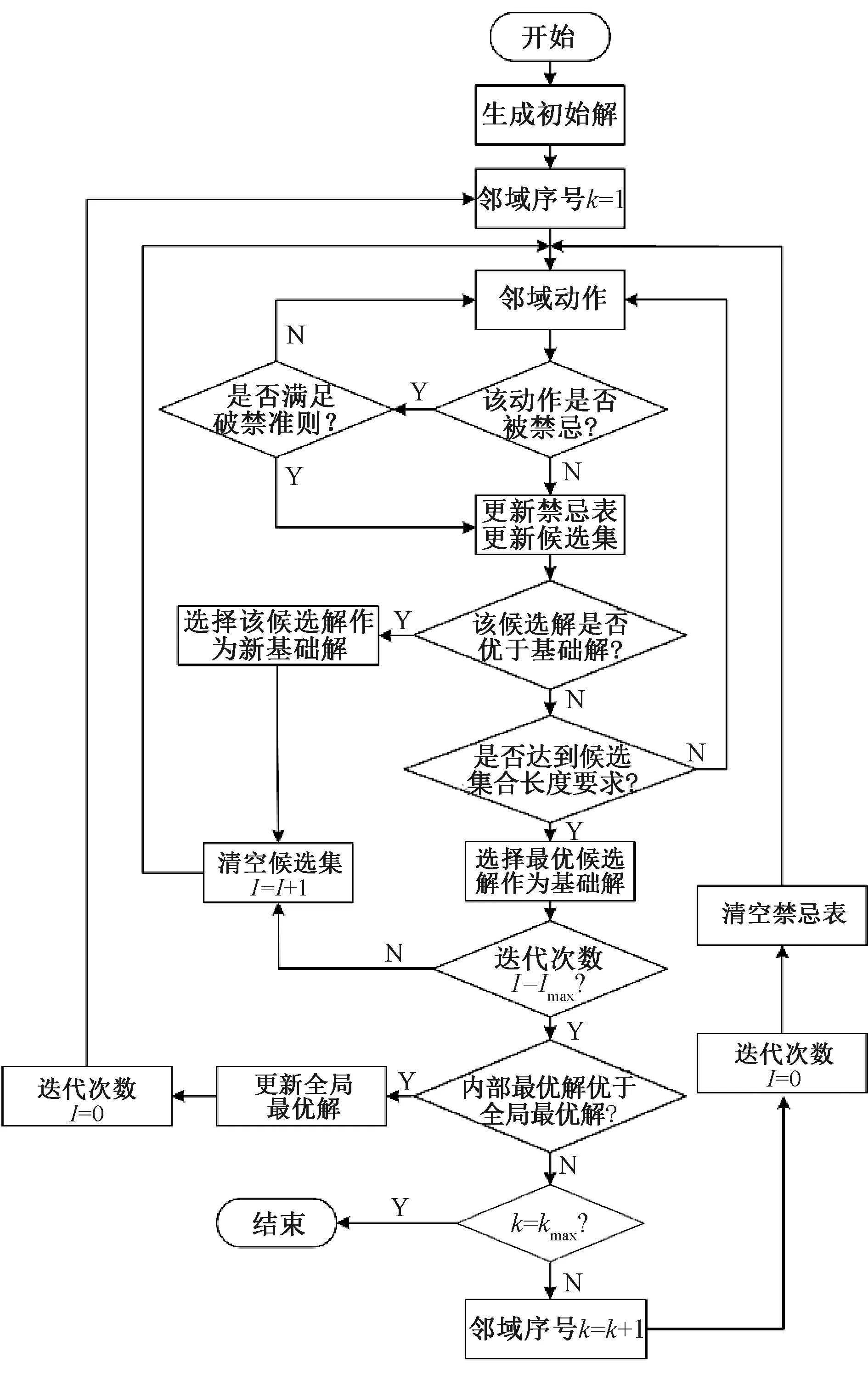
图6 算法总体流程图
3 模拟计算与结果分析
3.1 参数设置
本文港口铁路作业区有1条集卡走行线、2条装卸作业线,配置3台轨道门吊,堆场进口箱区和出口箱区分别配置2台场吊,由集卡负责各区域间的衔接。根据港口运营相关数据,算例中相关轨道门吊、集卡、场吊等关键技术参数取值见表2。集装箱堆码位置已知,任务间距离按照各坐标数值差绝对值之和计算。本文模型和算法通过Inter(R) Core(TM) i7-10875H处理器,PyCharm 2017.3.2编程实现。
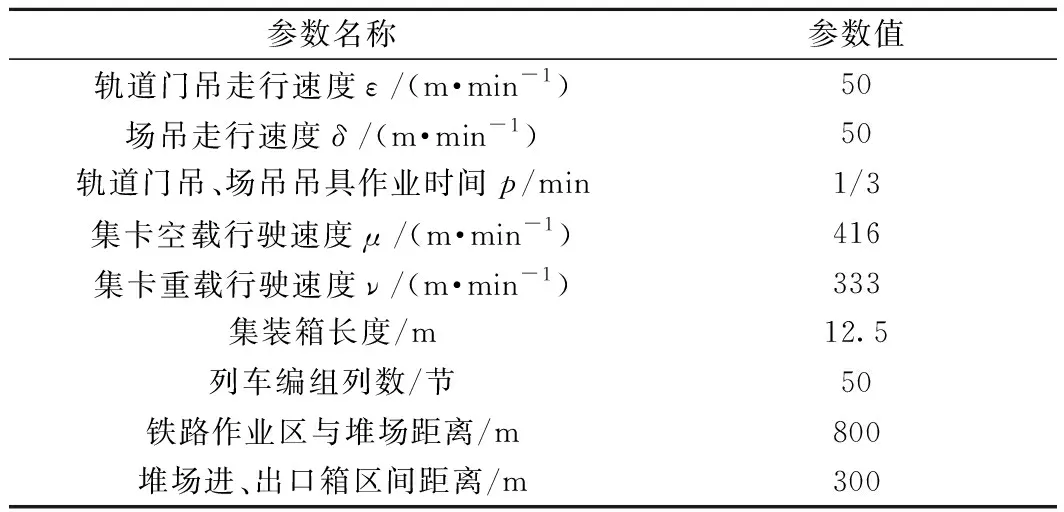
表2 参数设置
3.2 小算例结果
通过20个集装箱任务对算例计算结果进行展示,其中10个进口箱,10个出口箱,集装箱任务见表3,其中L1-x为集装箱在铁路作业区卸箱作业线位置;(x,y)为卸箱的堆存位置坐标,x为排编号,y为列编号。

表3 集装箱任务信息
20个集装箱任务作业计划的结果见图7,由图7可知,每一个任务都经过了3道作业流程,出口箱由轨道门吊卸下后经集卡运送至出口箱区,再由场吊进行堆存作业;进口箱由场吊取出后经集卡运送至铁路作业区,再由轨道门吊进行装车作业。采用混合装卸模式时,即进口箱与出口箱交替作业,提高了轨道门吊的设备利用率,且集卡在完成当前任务的运输后,不用返回原作业区,能够有效减少集卡的空驶距离,提高集装箱转运效率。对于进口箱区场吊,不用等待列车全部卸空即可开始作业,有助于缩短总作业完成时刻。算例结果表明,本文提出的算法可以有效得到3种设备协同调度作业方案,避免任务冲突的同时提高作业效率,为场站实际运营提供参考。

图7 小算例作业流程
3.3 装卸模式对比实验
通过算例对比先卸后装模式及混合装卸模式。算例涉及60个任务,其中30个进口箱,30个出口箱,3台轨道门吊,4台场吊,6辆集卡。若采用先卸后装模式,则轨道门吊需完成全部卸车任务后方可进行装车作业,若采用混合装卸模式,则轨道门吊可直接对空车厢进行装车作业。两种模式作业方案结果见表4。

表4 装卸模式对比实验结果 s
若采用先卸后装模式,则轨道门吊必须先完成全部卸车作业,即先进行出口箱的卸车—水平运输—出口箱区堆存作业,此时所有集卡在铁路作业区和出口箱区之间周转,产生较多空驶距离,且进口箱区场吊开始时处于空置状态,直至全部卸车作业完成,集卡再前往进口箱区,将进口集装箱运送至铁路作业区再空驶返回进口箱区取下一个集装箱,此种模式会使集卡产生较多空驶距离,从而导致任务接续时间较长,影响总完工时刻。而在混合装卸模式下,某一出口箱卸下后即可进行对应位置的装箱作业,此时铁路作业区轨道门吊和进口箱区场吊可同步作业,在铁路作业区的集卡取完出口箱后送往出口箱区,再直接前往进口箱区取进口任务箱,然后送往铁路作业区进行装车作业,有效减少了空驶距离。由表4可知,先卸后装模式下作业完工时间10次平均值为6 522.3 s,混合装卸模式下作业完工时刻10次平均值为4 551.5 s,效率提升了30.2%;设备空驶时间10次平均值则分别为12 231.1、5 955.6 s。综上所述,混合装卸模式即进口箱和出口箱进行交替作业时能够有效缩短作业完工时刻和设备空驶时间,有助于提高铁水联运集装箱装卸、转运作业效率和设备利用率。
进一步,对两种装卸模式下设备空驶时间的具体组成进行对比分析,结果见图8。设备空驶时间分别由轨道门吊空驶时间、集卡空驶时间和场吊空驶时间组成,由图8可知,集卡空驶时间在两种装卸模式下变化最大,说明集卡的重空衔接作业是影响整个作业过程效率的主要因素。在混合装卸模式下,场吊的空驶时间相比于先卸后装模式变化较小,轨道门吊空驶距离则有所减少,集卡空驶时间明显减少,此时集卡完成当前任务后无需返回原先作业区,而是直接等待当前区域待提取集装箱,能够有效提高集卡利用率,从而提高铁水联运作业效率。
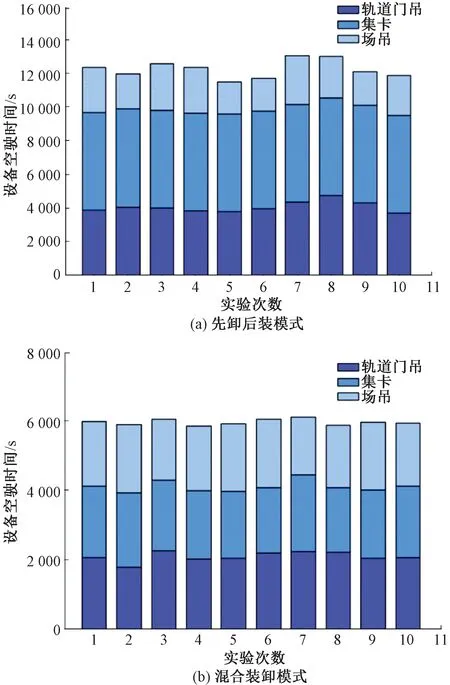
图8 不同装卸模式下设备空驶时间
3.4 关键因素分析
首先采用一组大规模算例来测试本文提出的算法效率,共涉及200个任务,其中100个进口箱,100个出口箱,3台轨道门吊,4台场吊,8辆集卡。目标函数由两部分组成,相互具有一定的制约关系。在优先保证集装箱装卸作业效率的基础上,同时考虑两者的量级关系,通过模拟实验将后续实验中目标函数比例系数定为α1=0.8,α2=0.2。通过提出的变邻域禁忌搜索算法对一定时间周期内轨道门吊-集卡-场吊联合作业调度计划进行决策,从目标函数值、作业完工时刻、设备空驶时间和计算时间四个方面描述10次实验,结果见表5。

表5 大规模算例实验结果
10次实验结果表明本文提出的算法表现良好,能在较短时间内能取得理想结果,目标函数值、作业完工时刻、设备空驶时间3项最优解与平均值的GAP值分别为3.7%、4.6%和3.2%。由表5可知,当总目标函数值最小时,作业完工时刻和设备空驶时间并不同时最优,即在可能出现等待下一任务衔接的情景时,设备会优先选择距离较远的可立即执行任务。此时设备空驶时间增加,而总作业完工时刻变少。相反,若要减少设备空驶时间,则当某项设备进度较快时,可能引起等待时间的增加,从而延长总作业完工时刻。因此,在实际作业中,可以根据场站作业效率及空驶成本的要求,选择合适的比例系数。
设备的数量配置会对设备协同调度作业的效率产生影响,若某类设备不足,则可能造成其他环节设备作业能力冗余,从而产生空置时间。另外,若设备发生故障问题,则也会影响可用设备数量。本文以轨道门吊为核心作业资源,量化分析其数量变化对作业完成时刻、设备空驶时间、设备平均空置时间等产生的影响,结果见表6。
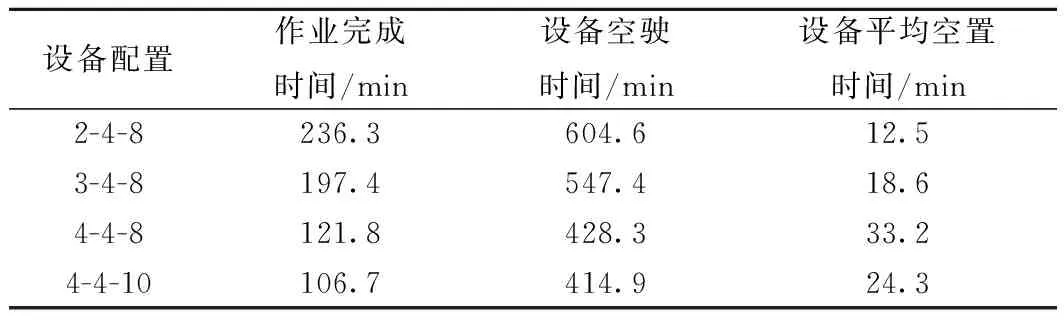
表6 轨道门吊设备数量灵敏度分析
由表6可知,轨道门吊数量的减少会使作业完成时刻增加,设备空驶时间增加,设备平均空置时间有所下降,其原因在于轨道门吊数量变少,则其余轨道门吊需要负责的作业区域变大,使得其空驶距离增加,此外,铁路作业区作业效率下降也会导致集卡的等待时间增加,影响其周转效率,最终导致总作业完工时刻延长。反之,增加轨道门吊的数量,总作业完成时刻有所提前,设备空驶距离减少,然而轨道门吊作业能力富余,使得其空置时间增加,可进一步考虑增加集卡的数量来满足铁路作业区的需求。综上,在实际作业中,可根据具体的设备使用成本以及作业完成时刻要求对设备配置方案进行决策。
4 结论
本文主要对铁路装卸线入港背景下联运港口铁路作业区与堆场的协同作业方法进行研究,考虑作业过程中涉及的轨道门吊、集卡、场吊3种设备的相互配合,首先对装卸设备的作业序列进行决策,在此基础上进一步确定集卡在各作业区间的衔接方案。此外,本文基于轨道门吊混合装卸作业模式,建立集装箱作业顺序优先级约束,增加了问题的复杂性。最后,本文通过一组60个任务的算例对比分析了不同装卸模式的作业效率,通过涉及200个任务的大规模算例验证了变邻域禁忌算法的高效性,分析了不同轨道门吊数量对最晚完工时刻、设备空驶时间、设备平均空置时间等关键指标的敏感性,并提出提高设备作业效率的相关建议。实验结果表明,混合装卸模式能够有效缩短作业完工时刻和设备空驶时间,且算法能在较短时间内求得较优解,GAP值不超过4.6%。
在实际作业中,可能出现设备故障等突发问题,针对此类情况,可以通过调整模型的输入如设备数量、作业范围等参数,利用本文提出的方法重新生成新的作业计划来应对。此外,也可考虑实际作业过程中的不确定风险,未来进一步研究设备协同作业调度鲁棒优化及重调度作业优化等问题。
猜你喜欢
浙江人大(2021年11期)2021-12-12
集装箱化(2020年7期)2020-06-20
中国航海(2019年2期)2019-07-24
专用汽车(2018年10期)2018-11-02
现代企业文化·理论版(2017年14期)2017-10-18
大陆桥视野·上(2017年5期)2017-06-27
山东工业技术(2017年8期)2017-05-08
航运交易公报(2016年49期)2017-04-17
集装箱化(2016年8期)2016-10-20
中国总会计师(2016年4期)2016-06-12
