
侧风环境下高速铁路接触网腕臂系统受力特性研究
2022-09-26 05:16杨红梅
电气技术 2022年9期
杨红梅
侧风环境下高速铁路接触网腕臂系统受力特性研究
杨红梅
(四川铁道职业学院,成都 611937)
随着我国铁路建设向西南、西北等复杂艰险山区大力推进,强风对接触网腕臂系统的影响愈发受到关注。本文研究侧风环境下腕臂系统的定常气动特性,采用计算流体动力学方法,建立腕臂空气动力学模型;采用雷诺时均方法对不同风速下的腕臂气动特性进行模拟,获得腕臂气动力系数值;最后对腕臂系统各构件的应力和位移进行详细分析,得到不同载荷叠加类型下的系统关键受力位置。研究结果可为接触网腕臂选型和结构参数优化提供参考。
高速铁路;接触网;腕臂系统;侧风环境;受力特性
0 引言
我国八纵八横铁路网已基本形成,电气化铁路运营里程突破12万km,铁路建设向西南、西北等艰险山区推进,牵引供电系统的安全性更加受到关注。接触网系统作为牵引供电系统的重要组成部分,是为电力机车提供能量的惟一通道,其动态特性是确保机车稳定受流的关键之一。
然而,这些地区气候环境复杂多变,接触网系统面临环境风、地震等外界环境激扰影响[1]。腕臂结构是用于固定承力索和接触线的装置,通过设置合理的拉出值,使接触线在受电弓碳滑板运行轨迹范围内,并将接触线的载荷传给支柱。因此,接触网腕臂系统不仅持续受线索张力作用,而且同时受环境风等影响,其受力特性更需引起重视。
在接触网腕臂受力研究中,王玉环利用Midas软件分析高原铁路接触网系统的腕臂结构适应性,并提出优化建议[2]。李少鹏实现了基于有限元法的腕臂静刚度、静强度分析,并以此为基础,研究截面的拓扑优化[3]。罗健等通过传统腕臂与新型腕臂的动态特性对比,以固有频率为主要评价依据,分析了新型腕臂的结构性能[4],并在非工作支最大工作载荷条件下,通过Abaqus软件对几种不同腕臂结构及其定位装置应力及挠度进行了校核[5]。邓洪等从理论分析和仿真计算两个角度,探讨了复合材料腕臂的受力情况,并对其拓扑结构进行优化[6]。张静等通过模态分析法求得接触网腕臂的固有频率,进而基于变形方程获得腕臂系统载荷的传递函数,分析腕臂上载荷的分布规律[7]。在环境风作用方面的研究主要集中于其对弓网系统受流性能的影响。郎天翼等以简单链型悬挂为对象分析龙卷风下的接触网动力响应[8]。吴凡平等针对山区峡谷地形风场,考虑其时间和空间相关性,研究接触网的风振特性[9]。
综上可知,目前针对腕臂力学特性的研究工作主要集中在静力学分析、动力学分析及疲劳特性分析上,考虑侧风作用下的腕臂气动特性的研究相对较少。在西南、西北等复杂艰险风区[10],强风对腕臂系统及接触网系统的影响不可忽略。因此,本文系统研究侧风环境下腕臂系统的定常气动特性,分析不同腕臂结构、不同载荷叠加类型下各关键构件的最大应力、最大位移和最大变形情况,以期为复杂艰险风区大规模接触网系统的安全可靠运行提供支撑。
1 侧风环境下腕臂气动特性分析
1.1 腕臂流体力学数学模型
本节重点关注不同风速下的腕臂气动力系数,通过流体计算软件Fluent高效求解不同工况下腕臂系统各零部件的升力系数和阻力系数大小,满足工程技术求解要求。
目前,常用的流体力学数值模拟研究方法有大涡模拟(large eddy simulation, LES)、雷诺平均(Reynolds-average Navier-Stokes, RANS)方法和分离涡模拟(detached-eddy simulation, DES)[11-13]。LES能够获得详细的流场瞬态信息,从而准确捕捉不同大小尺度的涡结构,但对近壁面边界层网格要求非常精细,导致产生较大的网格数,且要求计算的迭代步数非常大。因此,LES方法对计算机硬件水平要求很高,会消耗较多的计算资源和计算时间。DES则是结合了大涡模拟和雷诺平均湍流模型的优点,被应用于列车周围瞬态流场的模拟,计算结果与试验结果基本吻合。
RANS方法求解控制方程时进行了时间平均,这导致RANS方法的求解结果只反映了流场流动的宏观平均量。同时,RANS方法对网格精度的要求不是很高,计算所需的时间步长也相对更低。对于大尺度脉动不是非常明显的情况,RANS方法快捷、高效的优点可以很好地满足工程求解要求,因而被广泛采用。故本文采用RANS方法对腕臂周围流场及定常气动特性进行研究。
1)连续性方程

2)动量守恒方程



3)湍动能方程

4)湍动能耗散率方程

1.2 腕臂计算模型及流场区域

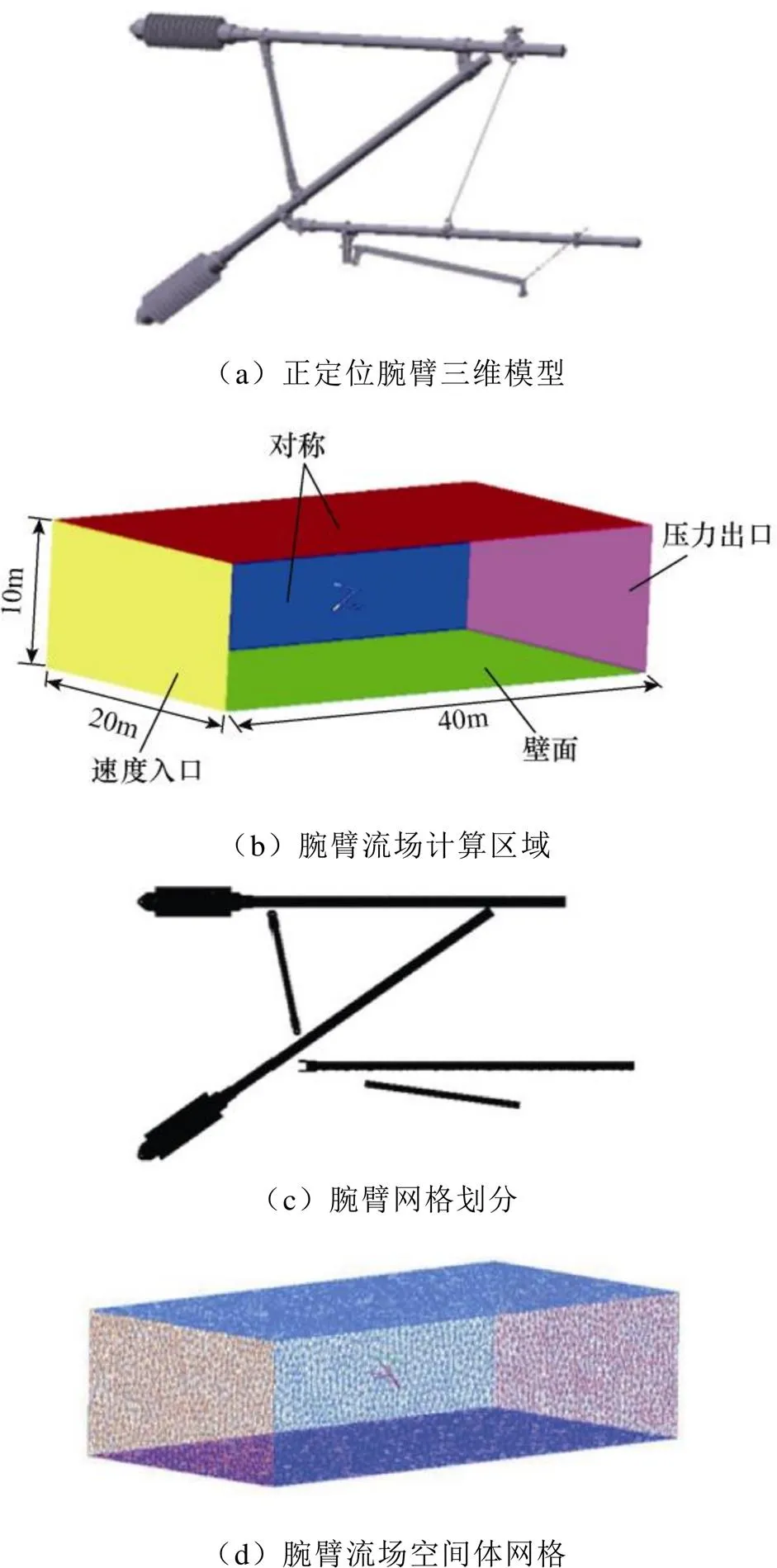
图1 腕臂流体计算基本模型及网格划分
速度方向长度取40m,垂直速度方向为20m× 10m的矩形面。腕臂流场计算区域如图1(b)所示。腕臂表面采用无滑移的壁面边界条件。根据现场调研情况,并结合TB 10009—2016《铁路电力牵引供电设计规范》和TB 10621—2014《高速铁路设计规范》给定的载荷系数,本文确定讨论35m/s和46.1m/s两种风速情况。速度入口面设置为速度入口边界,入口速度分别为35m/s、46.1m/s,压力出口面设置为压力出口边界,压力出口的相对压强设置为0Pa;对称面即顶面和两个侧面的边界条件设置为对称边界条件。采用非结构四面体网格对流场进行划分,空间流场最大网格为1m,腕臂表面网格为0.01m。腕臂网格和腕臂流场空间体网格分别如图1(c)和图1(d)所示。
1.3 腕臂各部件气动系数分析
对铝合金三角正定位腕臂和反定位腕臂进行35m/s、46.1m/s风速下空气动力学模拟,正反定位腕臂的表面压力云图、流场截面速度等值线云图和流场截面流线云图如图2所示,获得对应风速下的气动阻力系数和气动升力系数见表1和表2。由表可知,除定位管外,正定位腕臂大部分部件在不同风速时升力呈相反特性,这是由于气动系数随雷诺数变化,使部件在不同风速下呈现出不同值。
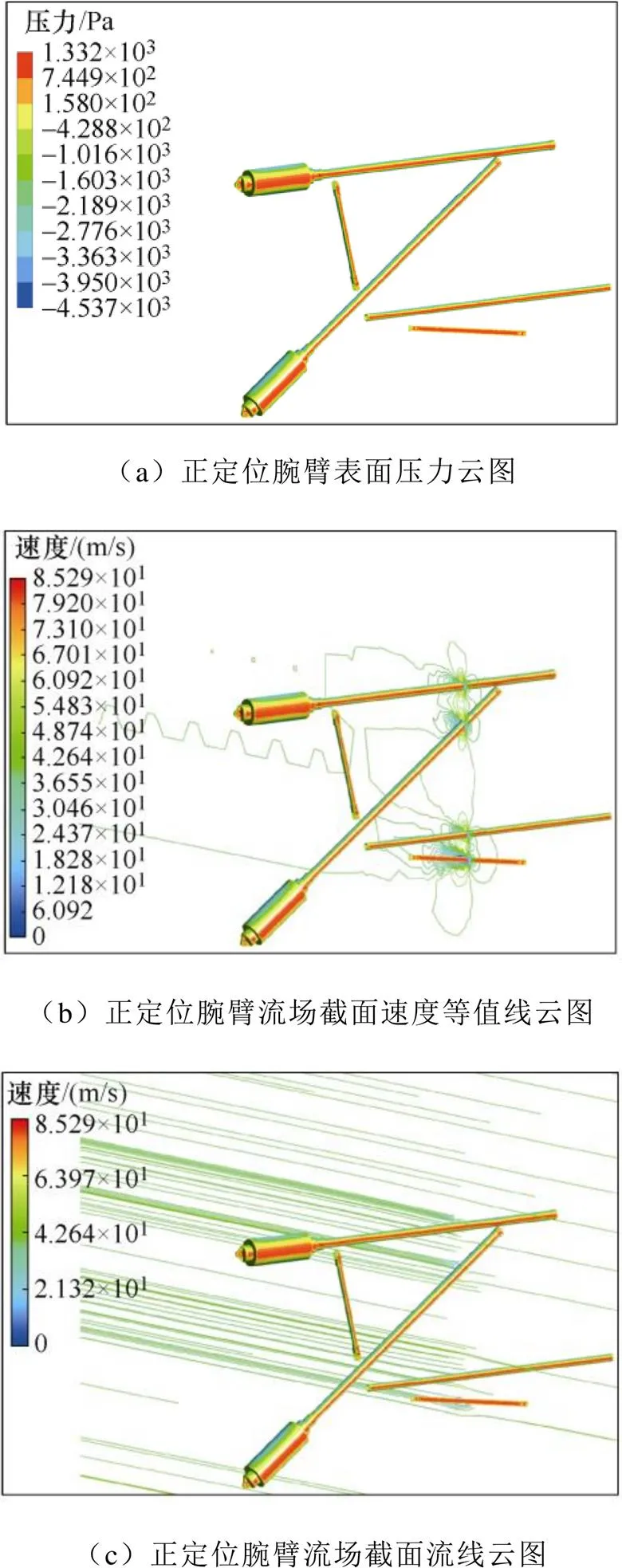

表1 铝合金三角正定位腕臂气动力系数
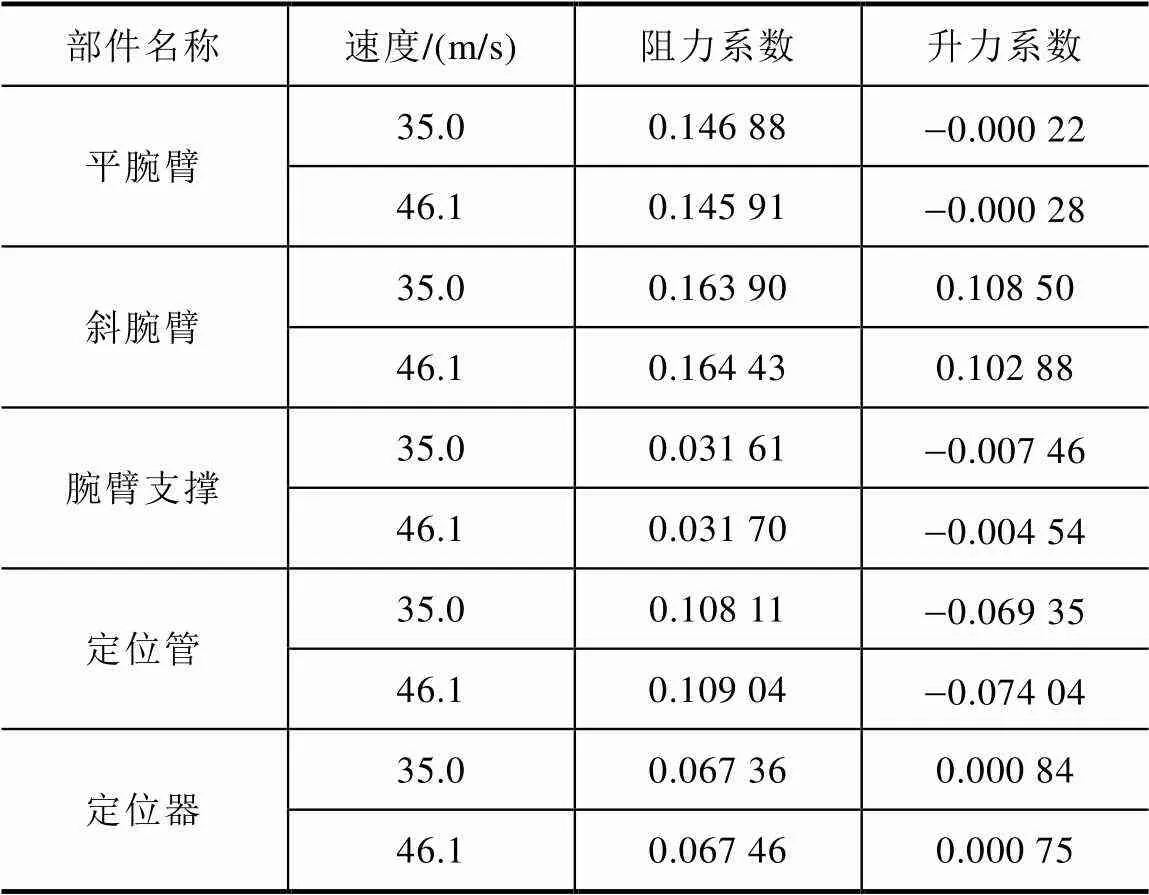
表2 铝合金三角反定位腕臂气动力系数
2 接触网腕臂系统载荷分析
2.1 建模基本设定
为提高仿真效率,对部分零部件做了简化处理,建立正反定位腕臂装置有限元模型,分析模型实际受力情况及约束方式,选择合适的连接方式,加载模型并求解,最终得到关键部件应力分布和形变状态。仿真过程考虑重力作用,同时对关键部件和非关键部件刚柔体进行区别设置。
1)基本技术条件
依托Ansys Workbench和Fluent仿真平台,采用的零部件技术条件包括:TB/T 2073—2020《电气化铁路接触网零部件技术条件》、TB/T 2074—2020《电气化铁路接触网零部件试验方法》、TB/T 2075.1—2020《电气化铁路接触网零部件第1部分:腕臂支撑装置》和GB/T 6892—2015《一般工业用铝及铝合金挤压型材》。
2)几何参数
腕臂系统主要几何参数包括上下腕臂底座距离、绝缘子长度、定位器长度、腕臂管、定位管、绝缘子断面尺寸等。
3)各构件连接方式
(1)腕臂底座与大地:固定。
(2)各腕臂连接件螺栓连接处:固定。
(3)绝缘子与腕臂底座,定位管与斜腕臂定位环:转动。
(4)定位器和定位器座连接处:转动。
4)载荷加载
载荷分为最大工作荷重和破坏荷重;试验工况分静态工况和动态工况两种。本次只针对静态工况下静载荷、小风载荷(风速35m/s)+静载荷、大风载荷(风速46.1m/s)+静载荷三种工况进行分析。根据TB/T 2074—2020《电气化铁路接触网零部件试验方法》中整悬挂试验加力的规定:
(1)接触线定位处施加水平载荷,大小为定位器的水平工作载荷。
(2)承力索在承力索座处施加水平载荷,大小为承力索座的水平工作荷重,同时施加垂直载荷,大小为承力索座的垂直工作荷重。也可以用一个合力替代水平载荷与垂直载荷,大小及方向由计算确定。
在参考标准的基础上采用仿真结果的载荷,静载荷基本力值按标准最大值进行设定,承力索竖直方向4kN、水平方向2.5kN,定位线夹水平方向3kN。通过采用RANS方法测得小风载荷(35m/s)和大风载荷(46.1m/s)时腕臂各部件的阻尼系数。
5)网格划分
对腕臂各组成部分均赋材料属性,由于零件种类较多且外形较为复杂,网格划分方式为Automatic Method,element size为5mm,最终划分单元数量为1 074 324个。腕臂网格处理和网格划分示例分别如图3和图4所示。
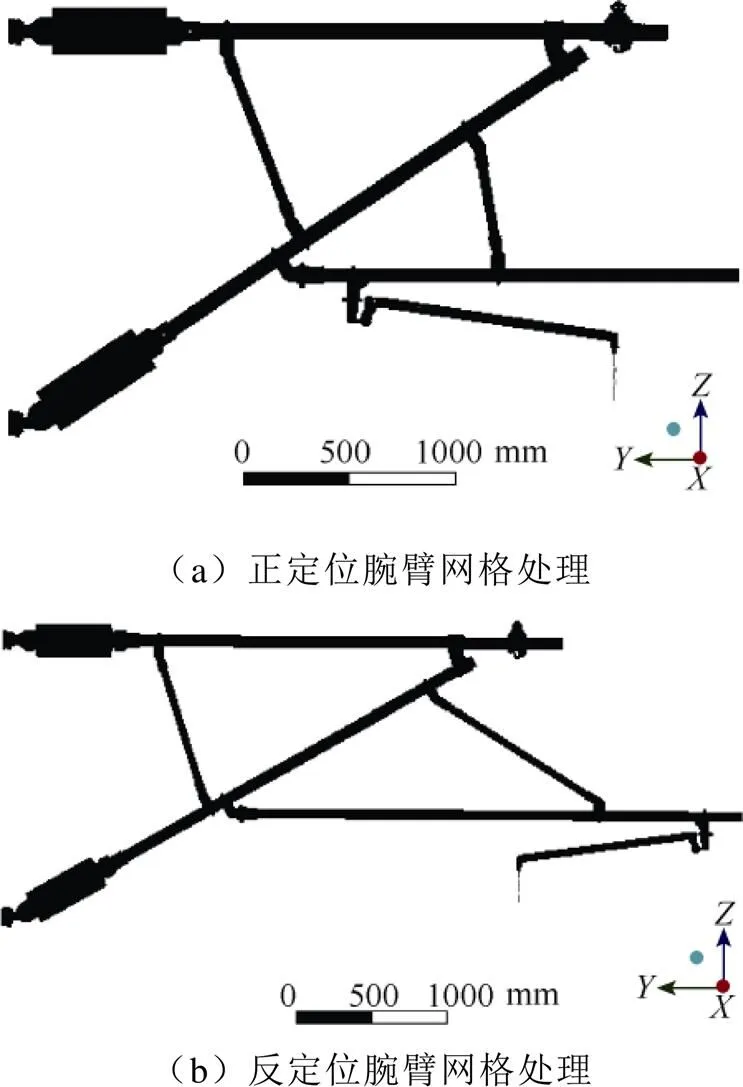
图3 腕臂网格处理
6)计算结果误差来源分析
为方便零件受力分析,对部分零件进行简化处理,网格划分会丢失部分模型特征,各部件之间的连接方式也未考虑摩擦。综上,应力和位移计算值可能会稍高于实际值。

图4 网格划分示例
2.2 腕臂载荷分析
正定位腕臂装置各构件应力云图和位移云图如图5所示。

图5 正定位腕臂装置静态求解
正反定位腕臂各构件最大应力见表3,最大位移和最大变形见表4。表3和表4中,A、B和C分别表示静载荷、静载荷与小风载荷(风速35m/s)叠加和静载荷与大风载荷(风速46.1m/s)叠加三种载荷类型;A-sc、B-sc分别表示相应的实测数据,可以看出:
1)无论是正定位腕臂还是反定位腕臂,三种载荷类型下腕臂系统的管件整体应力都较小,最大应力发生在定位器,且位于定位器和定位支座连接处。
2)正定位腕臂在三种载荷类型下的最大位移发生在定位器上,位于定位器和定位线夹连接处,定位器发生最大变形。

表3 不同类型腕臂结构、不同载荷类型下各构件的最大应力 单位:MPa

表4 不同类型腕臂结构、不同载荷类型下各构件的最大位移和最大变形 单位:mm
3)反定位腕臂在三种载荷类型下的最大位移与最大变形大部分发生在定位管上,位于定位管与管帽连接处。
4)根据表3和表4中不同类型腕臂结构、不同载荷类型下各构件最大应力、最大位移实测数据与计算结果的对比可以得出,实测结果与计算结果误差在10%以内,进一步说明了本文建立的腕臂空气动力学模型及相应计算方法有效,可以准确反映本文研究对象的动力学特性。
3 结论
腕臂结构的安全可靠是保障接触网系统稳定运行的必要条件之一,特别在侧风等复杂环境下。本文研究了侧风环境下腕臂系统的定常气动特性,采用计算流体动力学方法,建立了腕臂空气动力学模型;采用雷诺时均方法对不同风速下的腕臂气动特性进行模拟,获得了腕臂气动力系数值;最后对腕臂系统各构件的应力和位移进行了详细分析,得到了不同载荷叠加类型下的系统关键受力位置。
根据仿真数据和实测数据均可以看出,三种载荷下的最大应力均发生在定位器处,正定位腕臂的定位器和反定位腕臂的定位管产生了最大变形。因此,在外界风载荷作用下,腕臂系统的定位结构是薄弱环节,为了提高其可靠性,建议定位器与定位支座连接处采用销轴形式,可以避免定位器在外界风载影响下,受压产生不均匀磨损。同时,应适当增加定位管壁厚,提高定位器材质强度,特别是在侧风影响较大的地区。研究结果可为复杂艰险山区接触网腕臂选型与结构优化提供参考。
[1] 孙小军, 林圣, 张强, 等. 一种牵引供电系统地震灾害风险评估方法[J]. 电工技术学报, 2021, 36(23): 4970-4980.
[2] 王玉环. 高原铁路接触网腕臂结构适应性研究[J]. 铁道标准设计, 2022, 66(4): 162-167.
[3] 李少鹏. 基于有限元法的接触网腕臂截面拓扑优化分析[J]. 电气化铁道, 2022, 33(2): 17-20.
[4] 罗健, 张琦. 简统化接触网腕臂结构动力学特性分析[J]. 电气化铁道, 2021, 32(6): 58-63.
[5] 罗健, 莫继良, 韩凌青, 等. 新型高速铁路接触网腕臂与定位装置研究[J]. 铁道学报, 2018, 40(10): 36-42.
[6] 邓洪. 复合材料接触网腕臂结构及材料工艺研究[J].铁道工程学报, 2021, 38(6): 69-74.
[7] 张静, 刘金增, 刘志刚, 等. 高速铁路接触网腕臂系统的力学特性[J]. 西南交通大学学报, 2021, 56(2): 347-353.
[8] 郎天翼, 王浩, 刘震卿, 等. 移动龙卷风作用下高铁接触网风振响应分析[J/OL]. 振动工程学报, https://kns.cnki.net/kcms/detail/32.1349.TB.20210727.1351.004.html.
[9] 吴凡平, 徐钊, 刘志刚, 等. 山区峡谷地形风场下柔性接触网风振特性研究[J]. 铁道学报, 2021, 43(5): 47-61.
[10] 陈可. 高铁接触网弹性吊索配置方案对弓网受流性能的影响[J]. 电气s技术, 2021, 22(10): 22-27, 33.
[11] 曹鹏程, 廖绍凯, 张研, 等. 基于S-A湍流模型的Runge-Kutta有限元算法[J]. 计算力学学报, 2022, 39(2): 185-191.
[12] 李瀚涛, 舒立春, 胡琴, 等. 考虑覆冰粗糙度影响的风力发电机叶片气动性能数值仿真[J]. 电工技术学报, 2018, 33(10): 2253-2260.
[13] 张珍, 叶舒然, 岳杰顺, 等. 基于组合神经网络的雷诺平均湍流模型多次修正方法[J]. 力学学报, 2021, 53(6): 1532-1542.
[14] 张玉婵, 何正浩. 基于Fluent分析交叉跨越输电线路流场分布[J]. 电气技术, 2019, 20(5): 5-9.
Stress characteristics of catenary cantilever system of high-speed railway under crosswind environment
YANG Hongmei
(Sichuan Railway College, Chengdu 611937)
With the development of China’s railway construction to the southwest, northwest and other complex mountainous areas, the impact of strong wind on the catenary cantilever system is attracting more attention. In this paper, the steady aerodynamic characteristics of the cantilever system in the crosswind environment are studied. The aerodynamic model of the cantilever is established by using the computational fluid dynamics method. Reynolds time-mean method is used to simulate the aerodynamic characteristics at different wind speeds. The aerodynamic coefficients of the cantilever are obtained. Finally, the stress and displacement of each components of the cantilever are analyzed in detail, and the key stress positions under different load are obtained. The research results may provide a reference for catenary cantilever selection and parameter optimization.
high-speed railway; catenary; cantilever system; crosswind environment; stress characteristics
2022-05-05
2022-05-21
杨红梅(1987—),女,硕士,讲师,主要从事铁路电气化研究工作。
国家自然科学基金青年基金项目(52102478)
四川铁道职业学院重点项目(202111001)
猜你喜欢
天然气与石油(2022年4期)2022-09-21
中国应急管理科学(2022年2期)2022-05-23
电气化铁道(2022年2期)2022-04-25
云南画报(2021年10期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
建材发展导向(2021年10期)2021-07-16
科技创新导报(2021年33期)2021-04-17
云南画报(2020年12期)2021-01-18
劳动保护(2018年5期)2018-06-05
无人机(2017年10期)2017-07-06
