
CMOS 有源像素传感器辐射损伤对星敏感器星图识别影响机理与识别算法*
2022-09-30 05:41冯婕崔益豪李豫东文林郭旗
物理学报 2022年18期
冯婕 崔益豪 李豫东 文林 郭旗
1) (中国科学院新疆理化技术研究所,乌鲁木齐 830011)
2) (新疆电子信息材料与器件重点实验室,乌鲁木齐 830011)
3) (中国科学院大学,北京 100049)
为分析恶劣空间辐射环境导致星敏感器性能退化、姿态测量精度降低的原因,深入研究了60Co-γ 射线辐射环境下互补金属氧化物半导体有源像素传感器(complementary metal oxide semiconductor active pixel sensor,CMOS APS)电离总剂量效应对星敏感器星图识别的影响机理.通过搭建外场观星试验系统,实际观测天顶和猎户座天区,经过星图数据采集、星点提取与星图识别等试验流程,获得60Co-γ 射线辐照后CMOS APS 噪声对星图背景灰度均值、识别星点数量的影响机理,并提出一种寻找被辐射噪声湮没星点的识别算法.通过理论推导分别建立了CMOS APS 暗电流噪声、暗信号非均匀性噪声和光响应非均匀性噪声与星点质心定位误差的定量关系.研究结果表明60Co-γ 射线辐照后星敏感器星图背景灰度均值增大、星点识别数量减少,CMOS APS 辐照后噪声增大导致星点质心定位误差增大,从而影响星敏感器的姿态定位精度,该研究结果为高精度星敏感器的设计和抗辐射加固提供一定的理论依据.
1 引言
星敏感器作为卫星姿轨控系统的重要组成部分,对发射阶段和在轨飞行时卫星的姿态控制有极为关键的作用[1].星敏感器首先通过拍摄星空星图,再进行星图预处理、星图识别和姿态计算,最后输出姿态角数据为卫星等航天飞行器进行自主导航.星敏感器的核心组成部分是成像系统[2-5].早期星敏感器都是以电荷耦合器件图像传感器作为恒星成像器件,随着星敏感器低功耗、微小型化的需求日趋增多以及互补金属氧化物半导体(complementary metal oxide semiconductor,CMOS)工艺的进步,基于 CMOS 图像传感器的星敏感器成为目前市场上的主流产品[6,7].
恶劣的空间辐射环境会使互补金属氧化物半导体有源像素传感器(complementary metal oxide semiconductor active pixel sensor,CMOS APS)暗电流、暗信号非均匀性(dark signal non-uniformity,DSNU)、光响应非均匀性(photon response non-uniformity,PRNU)等辐射敏感参数退化[8,9].CMOS 图像传感器参数退化导致星敏感器采集的星图背景噪声明显增大,从而影响星敏感器的星点质心定位、星图识别、姿态定位精度等性能.国内外已有研究发现: 空间工作的星敏感器经辐照后采集的星图出现信噪比减小、星点拖尾等性能退化现象,影响星敏感器的在轨姿态定位精度[10].目前,卫星上会同时装配星敏感器和陀螺仪,当空间辐射导致星敏感器星图识别能力下降、姿态定位异常时,工程单位大多采取关闭星敏感器,依靠陀螺仪进行姿态定位的解决方法.这种解决方法可以使卫星继续运行,但存在一定风险,因为陀螺仪的姿态定位精度和星敏感器相比要低,存在卫星姿态控制的不确定性.另外还可以采取图像处理算法去除辐射诱发噪声对星图识别的影响,但图像处理算法的建立基于对CMOS APS 辐射诱发噪声机理的深入分析和CMOS APS 辐射效应对星敏感器星图识别机理的研究,仅使用常规降噪算法,有可能把星点信号也滤除,或者未滤除的部分噪点被星敏感器误认作是星点.因此,迫切需要开展CMOS APS辐射效应对星图识别的机理研究.
本文主要讨论了CMOS APS 电离总剂量效应对星敏感器所拍摄星图背景灰度均值、星敏感器识别星点数量的影响机理.基于机理分析提出了一种寻找未识别星点的算法,该算法可成功识别被背景噪声湮没的星点.此外,通过理论推导分别建立了CMOS APS 暗电流噪声、DSNU 噪声和PRNU噪声与星敏感器质心定位误差的定量关系.
2 样品与辐照试验
2.1 试验样品
试验选取商用8T CMOS 图像传感器作为样品,型号为CMV4000,分辨率为 2048×2048,像素尺寸为 5.5 µm×5.5 µm,灵敏度为4.64 V/(lux·s) (每秒接受单位光照强度产生4.64 V 电压),动态范围为60 dB,功耗为600 mW.其主要组成模块有: 内部时序发生器、串行外设接口、温度传感器、像素阵列、模拟前端和低压差分信号传输通道.其中模拟前端电路由可编程增益放大器、模数转换器、偏置电路等模块构成.图1 是8T CMOS 图像传感器的像素单元结构示意图,在4T 基本像素单元的基础上,8T 像素单元增加了采样管S1 和S2,像素内源极跟随器SF2 等晶体管,通过将电压信号存储在电容C1 和C2 中,实现全局曝光.同时,两个采样电容还将分别储存光生载流子转化后的电压和复位电压,实现相关双采样,有效抑制读出噪声[11].
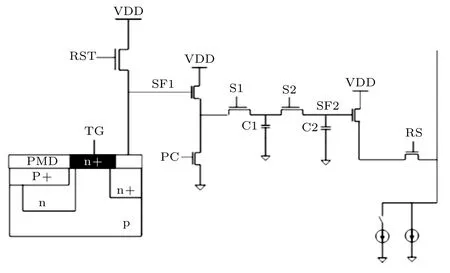
图1 8T CMOS 图像传感器像素单元结构示意图(PMD,金属前介质;TG,传输栅;RS,行选择器;RST,复位晶体管;VDD,器件内部工作电压;PC,预充电晶体管)Fig.1.Structure diagram of 8T CMOS image sensor pixel unit (PMD,pre-metal dielectric;TG,transfer gate;RS,row select transistor;RST,reset transistor;VDD,device internal operating voltage;PC,pre-charge transistor).
2.2 60Co-γ 射线辐照试验
60Co-γ射线辐照试验在中国科学院新疆理化技术研究所进行.CMOS 图像传感器辐照时剂量率选取50 rad(Si)/s,总剂量为50 krad(Si),不加偏置.当累积剂量到7.5,10,20,50 krad(Si)时,降源测试CMOS 图像传感器辐射敏感参数(暗电流,DSNU,PRNU).星敏感器外场观星试验是在丽江天文台进行.将辐照到7.5,10,20,50 krad(Si)的CMOS 图像传感器分别装入星敏感器测试系统,逐个拍摄猎户座天区和天顶,每个剂量点各采集95.6,143.4,525.6 ms 三个积分时间下的50 帧图.将采集的星图输入星图匹配软件,同时输入标定后的星敏感器的焦距值和主点位置,对猎户座天区星点进行提取、匹配.
3 CMOS 图像传感器辐射损伤与星敏感器性能退化机理
3.1 CMOS 图像传感器辐射损伤机理
γ射线辐照CMOS 图像传感器后,暗电流随电离总剂量的增加而增大,如图2 所示.暗电流增大的原因一方面是电离辐射在Si-SiO2界面处产生了大量界面态,界面态密度随累积剂量的增加而变大[12].界面态充当复合中心增大暗电流的产生率.另一方面是电离辐射在浅槽隔离以及掩埋型光电二极管(pinned photodiode,PPD)上表面的金属前介质(premetal dielectric,PMD)层引入了正氧化物陷阱电荷,它虽然不能作为复合中心直接产生暗电流,但其附加电场可以使表面耗尽区与PPD的耗尽区相互接触,这样界面态产生的电子-空穴对可漂移进入PPD 的耗尽区,从而提高载流子的收集效率[12].
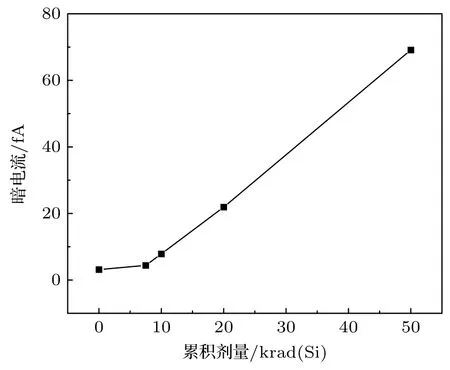
图2 暗电流随电离总剂量的变化Fig.2.Change of dark current versus the total ionizing dose.
DSNU 表征图像传感器芯片每个像素单元在暗场条件下响应的非均一性.如图3 所示,DSNU随电离总剂量的增加而增大,电离效应会产生电子-空穴对,电子和空穴在迁移的同时会随机复合,而每个像素单元的随机复合概率不同,从而导致DSNU 增加;同时辐射效应产生的缺陷能级,充当载流子产生-复合中心,也会增加电子空穴的产生-复合概率,从而加剧DSNU 的退化行为.

图3 DSNU 随电离总剂量的变化Fig.3.Change of DSNU versus the total ionizing dose.
PRNU 表征光响应相对于平均值的偏差,以百分数的形式表现.如图4 所示,PRNU 随电离总剂量的增加而增大,电离效应诱发的界面态降低光生载流子寿命,使得光生电荷收集效率下降,表现为量子效率的退化.由于界面陷阱电荷分布不均匀,像素之间量子效率退化存在差异,像素的响应度差异增大,最终导致PRNU 上升.
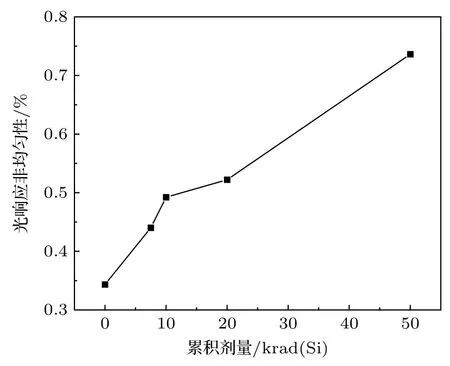
图4 PRNU 随电离总剂量的变化Fig.4.Change of PRNU versus the total ionizing dose.
3.2 星敏感器性能退化机理
3.2.1 背景灰度均值
将辐照到7.5,10,20,50 krad(Si)的CMOS 图像传感器分别装入星敏感器测试系统,逐个拍摄猎户座天区和天顶,每个剂量点各采集95.6,143.4,525.6 ms 三个积分时间下的50 帧图.分别计算星敏感器每个剂量点不同积分时间所采集星图的背景灰度均值,如表1 所列,随着累积剂量的增加,背景灰度均值逐渐增大.对于同一累积剂量,随着积分时间的增大,背景灰度均值也逐渐增大.背景灰度均值增大的主要原因是辐照后CMOS 图像传感器总噪声的增大.
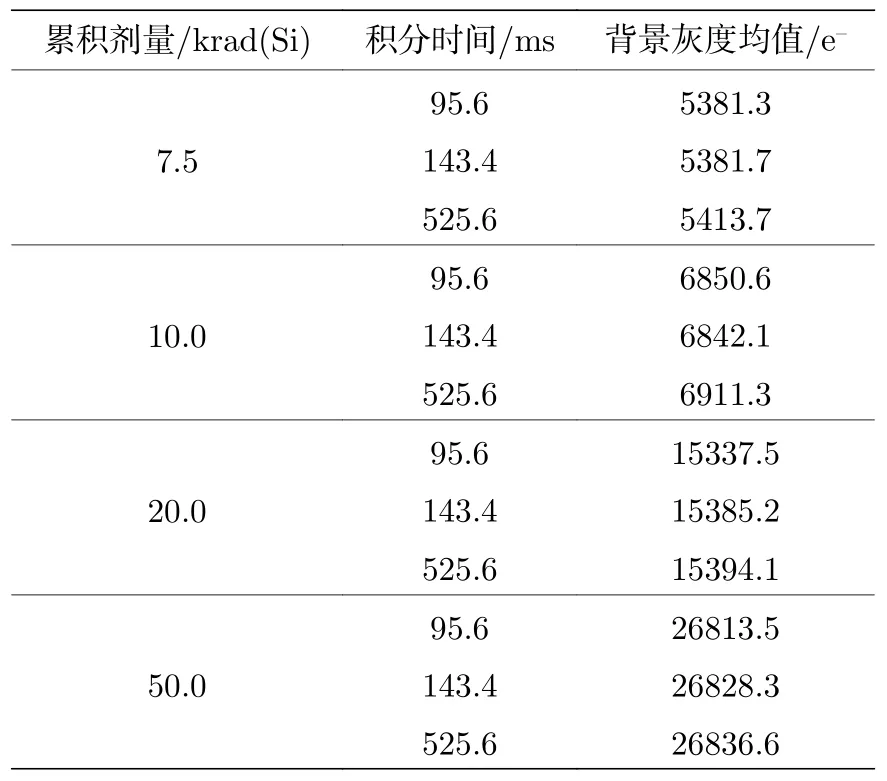
表1 星敏感器每个剂量点不同积分时间所采集星图的背景灰度均值Table 1.Image gray-mean of the whole star map with different integration time and different dose levels.
CMOS 图像传感器噪声来源于其光敏单元的光电二极管、像元晶体管的复位和读出过程、有源放大器、行列选择开关等[13],主要包括暗电流噪声、DSNU 噪声、PRNU 噪声、固定模式噪声和读出噪声.其中DSNU 噪声、PRNU 噪声、固定模式噪声随累积剂量的增大而增大.暗电流噪声既随累积剂量的增大而增大,也随积分时间的增大而增大.
暗电流噪声等于暗电流产生电子数的平方根.CMOS 图像传感器暗电流来源可大致分为两部分:像素单元与外围电路.CMOS 图像传感器的工作原理决定了外围电路暗电流是与积分时间无关的固定值;而像素单元暗电流随着积分时间的增加,输出灰度值会逐渐增大.电离辐射引起像素之间暗电流产生率差异性增大,导致DSNU 噪声的增加.PRNU 噪声表征了光响应相对于平均值的偏差.由于界面陷阱电荷分布不均匀,像素之间量子效率退化存在差异,像素的响应度差异增大,最终导致PRNU 噪声上升.
固定模式噪声体现了像素与像素之间的差异,在固定积分时间下,固定模式噪声基本是一个常数,其主要来源于两个方面: 一方面是制造过程中像素内晶体管或列级晶体管失配;另一方面是像素内暗电流.由于晶体管失配导致的固定模式噪声可以通过相关双采样消除,而暗电流的来源多种多样,产生机制各不相同,由暗电流导致固定图像噪声则无法完全消除.在无光照条件下,固定模式噪声可用DSNU 来表征;在光照条件下,通过PRNU来评估.读出噪声属于暂态噪声,是由于电路通道中各种噪声源(列放大器、可编程增益放大器和模数转换器)引起的信号电平的随机波动,试验中电路通道保持不变,因此读出噪声的影响可以忽略不计.
3.2.2 识别星点数量
本试验使用三角形算法进行星图识别.星图识别前需要根据星敏感器的极限星等对史密松天体物理天文台星表星表(Smithsonian astrophysical observatory star catalog,SAO)进行筛选并建立星对角距查找表.星对角距查找表由星对星号和星对角距余弦值组成.星对角距余弦值可以根据构成星对的两颗导航星A 和B 的方向矢量计算得到.从SAO 星表中查到星A 和星B 的赤经、赤纬分别为(αA,δA)和(αB,δB),则两颗星的方向矢量分别为
这两颗星星对角距余弦值为VA·VB,计算符合星敏感视场角的任意两个颗星的星对角距余弦值并由小到大排序.然后对星图进行预处理和星点细分定位.星图预处理先对所拍星图进行滤波,再通过相应计算得到星点粗定位所使用的阈值,通过阈值分割,对星点进行连通域标记.星点细分定位可以得到星点在星图中的准确位置,如采用质心法,可以使精度达到亚像素级别.三角形星图识别方法分为以下10 个步骤.
1)首先从星图中提取星点,然后按照能量对星点排序,选择最亮的Sn颗星.
2)在最亮的星中将距离光轴最近的星作为第一目标星S1.
3)在S1的半径环外,选取视场中最亮的两颗星S2和S3.
4)将这三颗星按照三角形几何关系排序.
5)通过质心法计算这三颗星在星敏感器探测器面阵上的位置(XI,YI):
其中Iij是星点在 (i,j) 处的灰度值.
6)设其中两颗恒星的坐标为(x1,y1)和(x2,y2),根据标定出的主点位置(x0,y0),焦距f,计算得到这两颗恒星在星敏感器坐标系下的方向矢量:
7)依照上述方法计算S1S2,S1S3和S2S3星对之间星对角距余弦值的测量值α1,α2,α3.
8)考虑到星敏感器的成像误差,第7)步计算出的星对角距余弦值的测量值与星对查找表中星对角距余弦值存在较小的差值,因此在[α1-ε,α1+ε],[α2-ε,α2+ε],[α3-ε,α3+ε]范围内,对照星对角距查找表,找出S1S2,S1S3和S2S3可能的导航星组合: [I(k12),J(k12)],[I(k13),J(k13)] 和[I(k23),J(k23)].
9)从 [I(k12),J(k12)],[I(k13),J(k13)] 中找出相同的星S1,从 [I(k12),J(k12)],[I(k23),J(k23)] 中找出相同的星S2,从 [I(k13),J(k13)],[I(k23),J(k23)] 中找出相同的星S3.
10)若S1,S2,S3是唯一的,就识别成功;若S1,S2,S3不唯一,则重复以上步骤,重新构建三角形进行识别.
不同累积剂量下星图三角形识别匹配结果如表2 所列.随着累积剂量的增加,星敏感器识别星点的数量逐渐减少,当累积剂量增加到50 krad(Si)时,仅能匹配成功5 颗恒星.图5 为星敏感器在不同累积剂量下采集的星图,星图已经过降噪处理.可以看出,在累积剂量为10 krad(Si)时,星敏感器采集的星图可以成功识别9 颗恒星,且分布在视场不同区域;当累积剂量增加到50 krad(Si)时,星敏感器采集的星图仅可以识别5 颗恒星,且星点分布较为集中.
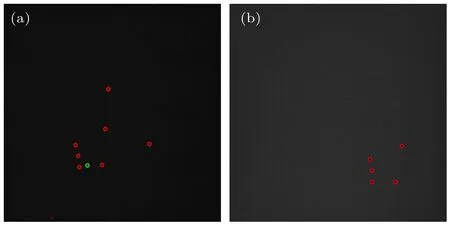
图5 不同累积剂量下星敏感器采集的星图 (a) 10 krad(Si);(b) 50 krad(Si)Fig.5.Star maps collected by the star sensor at different cumulative doses: (a) 10 krad(Si);(b) 50 krad(Si).

表2 不同累积剂量下星敏感器识别星点数目Table 2.Number of star points identified by star sensors at different cumulative doses.
针对高累积剂量下星点识别数目下降问题,对星图识别程序进行调试分析,发现随着累积剂量的增加进入识别过程的待识别星数目减少.为了对未识别的星进行重新识别,本文首先根据星敏感器的成像原理以及天球坐标系到星敏感器坐标之间的旋转变换、星敏感器坐标系到图像坐标系之间的投影变换关系确定某星点未识别的原因.
以10 krad(Si)星图识别到的星SAO132176为例(图5(a)中绿色圆圈),在50 krad(Si)星图中该星未能识别.利用50 krad(Si)星图成功识别出的星的观测矢量和在天球坐标系下的方向矢量,结合姿态四元数估计算法计算出当前星敏感器姿态的四元数:

并将四元数转换为旋转矩阵M:
在SAO 星表中查找SAO132176 在天球坐标系下的赤经和赤纬:

建立该星在天球坐标系下的单位矢量:
通过旋转变换,得到该星在星敏感器坐标系中方向矢量:
根据星敏感器的主点坐标(x0,y0)和焦距(f),经过投影透视变换,得到星SAO132176 在所拍星图的位置:
考虑到像素坐标都是整数及光学系统畸变等其他因素的影响,对计算结果进行取整处理,同时在计算出的位置附近搜索灰度值最大的像素即为星SAO132176 在此星图中的中心位置.

以该坐标为中心,3×3 窗口为大小,选为该星覆盖区域,如图6(a)所示.
经过预处理后的星SAO132176 覆盖区域最大灰度值为289,如图6(b)所示,而该星图在阈值分割时所使用的阈值为296,导致星SAO132176 未进入后续质心定位和星图识别过程.在调整阈值分割值为285 时,星SAO132176 可成功进入后续质心定位和星图识别过程,并最终被成功识别.同理,在设置合适阈值后其余未识别星均可成功识别.这说明CMOS 图像传感器辐射损伤导致所拍星图背景灰度均值和方差增大,而星图阈值分割值通常设置为星图背景灰度均值与三倍星图灰度值方差的和,当辐照到一定累积剂量后,某些星斑的灰度值低于阈值分割所设置的值,从而影响识别结果.本文提出的寻找未识别星点算法的原理: 当星图识别星数明显低于星敏感器设计准则要求的视场内星点数目时,则根据SAO 星表数据和已解算出的姿态信息计算出该幅星图中未识别星点的位置,并综合考虑未识别星点灰度值范围,在后续星敏感器所拍星图中程序自动降低阈值以控制进入后续识别流程的待识别星点数目.使用该算法对后续所拍星图进行验证分析,证明该算法可有效解决γ辐射导致的星敏感器星点识别数目下降的问题.
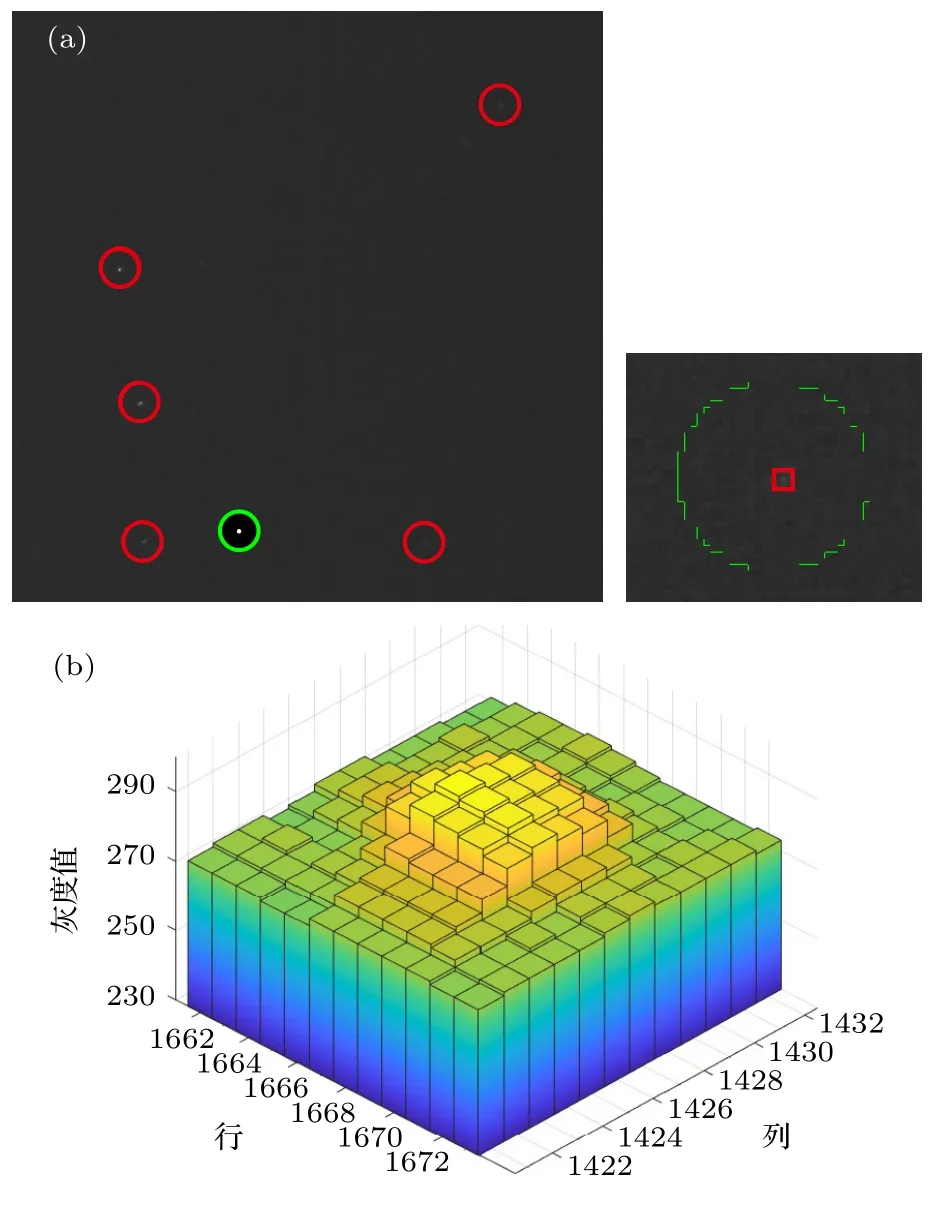
图6 (a) 星 (SAO132176) 在累积剂量50 krad(Si)星图中位置 (白色方框为未识别星覆盖范围);(b) 该星斑及附近灰度值分布Fig.6.(a) Star (SAO132176) position of 50 krad (Si) star map (The white box is the coverage of unidentified stars);(b) gray value distribution of the star spot and its vicinity.
3.2.3 星点质心定位精度
星敏感器姿态测量精度主要取决于星点质心定位精度.星敏感器所拍星图中的星点质心定位误差不能直接计算,但可通过星对角距标准误差间接计算得到星点质心定位误差,星对角距标准误差是星点质心定位标准误差的1.42 倍[14].由于不同累积剂量下星点识别数量有差异,因此在计算星对角距标准误差时,其他累积剂量点都选取和50 krad(Si)成功识别的相同5 颗星.利用实测和理论星对角距计算出不同累积剂量下5 颗星的星对角距标准误差,如图7 所示.根据星对角距标准误差与质心定位标准误差的关系,结合星敏感器视场角和分辨率计算得到不同累积剂量下的星点质心定位标准误差(pixel),结果如图8 所示.从图7 和图8 可以看出随着累积剂量的增大,星对角距标准误差逐渐增大,质心定位标准误差也逐渐增大,即星点质心定位精度逐渐下降.对于同一累积剂量,随着积分时间的减小,星对角距标准误差和质心定位标准误差都逐渐增大,星点质心定位精度逐渐降低.根据3.1 节分析,γ射线辐照会导致CMOS 图像传感器中的暗电流噪声、DSNU噪声和PRNU 噪声增大,图像传感器辐照后噪声增大又会导致星图背景噪声增大,从而影响星点质心定位精度.为了定量分析CMOS 图像传感器暗电流噪声、DSNU 噪声和PRNU 噪声对星敏感器质心定位精度的影响,分别建立各噪声对质心定位误差影响的函数关系式.

图7 星对角距标准误差随累积剂量的变化Fig.7.Star diagonal distance standard accuracy versus the total ionizing dose.
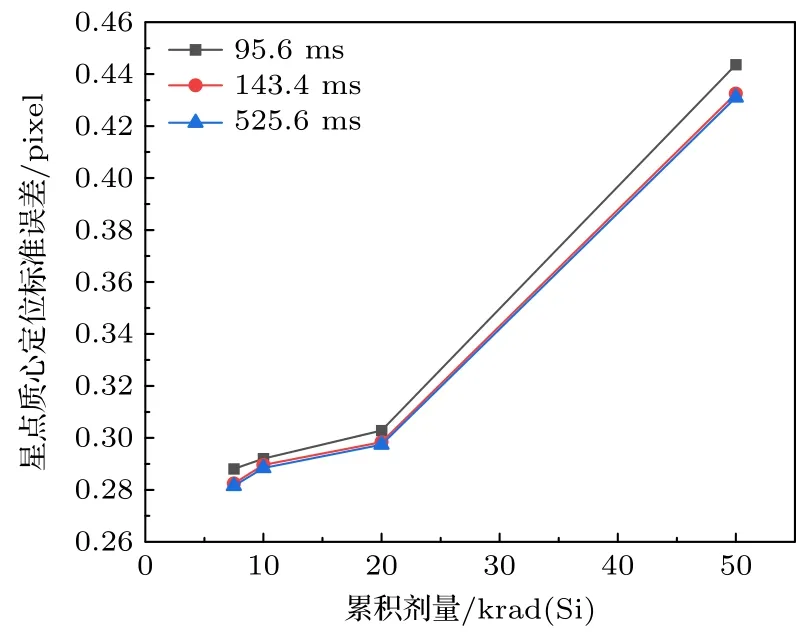
图8 星点质心定位标准误差随累积剂量的变化Fig.8.Star point centroid positioning standard accuracy versus the total ionizing dose.
星图 (i,j)处的灰度值Iij由两部分组成: 星点信号值Rij和噪声信号值Nij,即

以X方向(横坐标)为例,由质心提取公式得到噪声导致的X方向上的误差 Δx:
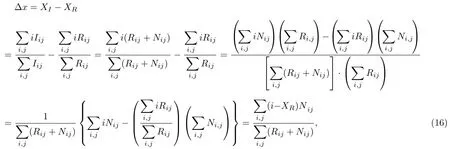
式中XI,XR分别为总信号的质心位置和星点信号的质心位置.
由于CMOS 图像传感器暗电流噪声、DSNU噪声和PRNU 噪声均为白噪声[15],均值为0,因此此类噪声引起的星点中心误差的均值也为0.由此可得质心定位误差的方差为
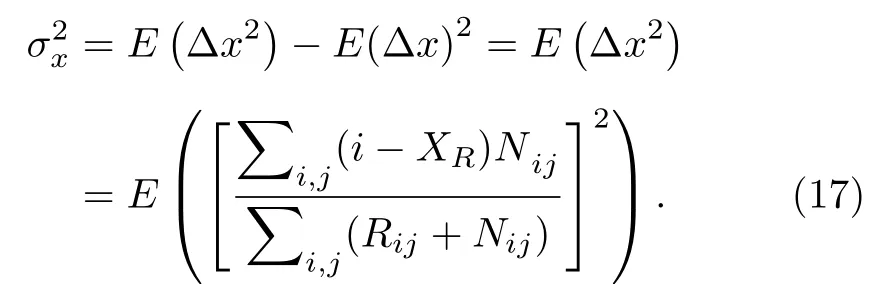
考虑到真实信号的灰度值远大于噪声信号的灰度值,且像元之间的噪声互不相关,即

则(17)式可进一步简化为


设质心定位时所选窗口大小为m×m,则(19)式可进一步计算得到
在本次试验中,窗口大小为3×3,即m=3,代入(21)式,得到噪声对质心定位标准误差影响的函数:

其中R0=,即所选窗口内总星信号值.
暗电流非均匀性噪声: 在积分时间tint内生成的像素平均暗电流电子数为Idtint(Id为暗电流值),暗电流非均匀性噪声方差为=Idtint,那么可得到

(23)式中Id随累积剂量的增加而增大,故暗电流噪声导致的质心定位误差σx,DCNU随累积剂量增加而增大.由于R0与积分时间呈线性关系,则CMOS图像传感器暗电流噪声导致的质心定位误差与积分时间呈关系,增加曝光时间可以减小暗电流噪声对质心定位误差标准差的影响.而在本次实验中,积分时间为143.4 ms 时,相较于积分时间为95.6 ms 时所拍星图,质心定位误差降低,但此时星点区域像元已接近饱和区,光子转移曲线变化速率变缓,故当积分时间为525.6 ms 时,质心定位误差与积分时间143.4 ms 相比变化不明显.

(24)式中R0与积分时间呈线性关系,那么σx,DSNU的大小取决于σDSNU,σDSNU的值随累积剂量的增加而增大,故暗电流不均匀性噪声导致的质心定位误差随剂量增加而增大.
PRNU 噪声: PRNU 噪声等于光响应不均匀度与星信号的乘积,则可得

(25)式与高斯弥散半径和窗口大小有关.根据实际情况,高斯弥散半径取0.8,计算得到

式中σPRNU随累积剂量增加而增大,故PRNU 噪声导致的质心定位误差随累积剂量增加而增大.
从以上分析可知,随着累积剂量的增加,CMOS图像传感器暗电流噪声、DSNU 噪声以及PRNU噪声逐渐增大,导致星点质心定位误差逐渐增大,最终影响星敏感器的姿态测量精度,而适当增加积分时间可减少星点质心定位误差.但积分时间太大使星点区域像元已接近或到达饱和区,光子转移曲线变化速率变缓或不再变化,此时再增加积分时间对星点质心定位误差的减少已不明显.
4 结论
60Co-γ射线辐照后,CMOS APS 暗电流噪声、DSNU 噪声、PRNU 噪声随累积剂量的增大而增大,CMOS APS 总噪声的增大又会导致星敏感器拍摄星图背景灰度均值增大,背景起伏明显,从而导致星点识别难度增大,星点识别数量减少.基于机理分析,本文提出了一种寻找未识别星点的算法,该算法可以成功识别被背景噪声湮没的星点.研究发现,CMOS APS 暗电流噪声、DSNU 噪声和PRNU 噪声增大导致星点质心位置的偏移,最终影响星敏感器星点质心定位精度.本文对星敏感器设计单位提高星敏感器识别星图成功率、保障卫星在轨安全可靠运行奠定了理论基础.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
军事文摘(2022年12期)2022-07-13
北京航空航天大学学报(2021年4期)2021-11-24
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
综艺报(2019年15期)2019-08-16
现代装饰(2019年7期)2019-07-25
中学生数理化·教与学(2019年5期)2019-06-06
北京航空航天大学学报(2019年4期)2019-05-05
兵工学报(2018年7期)2018-08-07
