
基于动态神经网络的机电作动系统传感器信号恢复研究
2022-10-14 01:06孙晓哲白玉轩杨建忠
机床与液压 2022年1期
孙晓哲,白玉轩,杨建忠
(1.中国民航大学安全科学与工程学院,天津 300300;2.中国民航大学,天津市民用航空器适航与维修重点实验室,天津 300300; 3.中国商飞北京民用飞机技术研究中心,北京 102211)
0 前言
随着多电/全电飞机技术发展的趋势和飞控技术的进步,电作动技术逐渐应用于飞控舵面作动系统中[1],如波音B787、空客A350等机型的飞控舵面已采用了电作动技术。机电作动系统中包含多种类型传感器如位置、转速和电流传感器等,以反馈实际位置、转速和电流信息来进行自动控制。因此,传感器输出的正确性直接影响了机电作动系统控制的正确性。从传感器的结构和工作原理来看,传感器在实际应用中的可靠性比机械组件要低很多,是系统相对可靠性有待提升的环节。例如,印尼狮航空难事故中飞机的攻角传感器发生故障,2个传感器的输出差值超过阈值,无法确定正确的传感器,使得飞机接收到了错误的攻角信息。目前对于机电作动系统传感器故障检测的研究较多,而针对故障后传感器信号的恢复问题的研究相对较少。
法国某大学的LAMIH实验室提出了一种针对飞机冗余传感器的故障检测与隔离方法[2],目标是在一组(一般为3个)冗余信号参数中选择有效参数;设计了基于传感器中非故障信号的数据融合算法,利用动态权重恢复故障后的信号。NASA的SILVA等[3]提出了一种采用神经网络的专家系统,该系统结合了面向对象建模、规则和语义网络来处理机电作动系统中的传感器故障,如偏置、漂移、缩放和丢失,利用故障参数提取的传感器校正模块进行信号反推,进而完成信号的回复;但是该方法不能处理如卡阻、断开等故障模式。巴西某大学的REYES等[4]提出一种在线监测和校正多个传感器测量值的神经网络故障检测策略,实现故障传感器校正。综上,目前的研究仅依靠确定的故障强度对原信号进行反推,并未考虑传感器信号完全丧失后的信号恢复。另外机电作动系统指令为人为输入,不能事先确定,指令信号由此产生的不确定性也为信号恢复带来了挑战。
机电作动系统传感器故障信号分为液态和非液态故障:液态故障指在正常信号上进行叠加的异常信号如偏置与噪声,而非液态故障包括断开、卡阻和断续等故障模式。文献中利用故障强度反推原信号的方法不能解决非液态故障信号恢复的问题,而动态神经网络可以根据历史值进行学习并预测正确值,基于此原理可利用动态神经网络方法进行非液态故障如信号丧失情况下的信号恢复。
本文作者针对无法判定正确的传感器以及信号完全丧失情况下的信号恢复问题,采用动态神经网络的方法开展了机电作动系统传感器的信号恢复研究。
1 动态神经网络概述
与静态神经网络采用相同的网络架构与参数进行推理不同的是,动态神经网络在处理不同测试样本时,动态地调节自身的结构/参数,且进行计算时还利用当前时刻及之前的数据进行下一时刻的数据计算,具有反馈性和记忆性。利用该特点使得传感器信号恢复成为可能,将机电作动系统指令输入作为网络输入,选择相应的传感器的输出值作为神经网络的预测值,建立输入与输出之间的动态神经网络,通过动态神经网络的记忆属性,对故障的传感器信号进行识别和恢复重构,同时也可以实现对非液态故障传感器的信号恢复。此研究针对可用的两类动态神经网络:
(1)非线性动态神经网络
y(t)=f[x(t-1),…,x(t-d)]
(1)
(2)NARX动态神经网络
y(t)=f[x(t-1),…,x(t-d),y(t-1),…,y(t-d)]
(2)
图1及图2展示了两种网络的结构。这两种网络的特点是网络输出都与输入的历史值有关,但是这两种神经网络的输入到输出分别为开环和闭环结构。可以看出:非线性动态网络的输出y(t)仅仅取决于输入值x(t),为开环结构;对于NARX动态神经网络,输出y(t)还反馈到了输入端,输入x(t)和输出y(t)的历史值决定了y(t),为闭环结构。NARX动态神经网络具有反馈的自回归特性,可以使得该神经网络的训练样本更丰富[5],大量的样本有助于提高映射的准确性。

图1 非线性动态神经网络

图2 NARX动态神经网络
因此本文作者将这两种动态神经网络应用于机电作动系统传感器信号的恢复,在无法输出正确的传感器信号(包括信号丧失和信号异常)的情况下进行信号恢复。
应用动态神经网络算法的流程如图3[6]所示: (1)运行机电作动系统模型获取正常工作情况下的数据,包括位置指令信号和相应的传感器信号;(2)再将获得的传感器数据分为3组,分别用于神经网络的训练、结果的验证和结果测试;(3)根据神经网络结果的要求确定隐含层的神经元数量、时延阶数以及学习的规则与方法等;(4)训练神经网络,观察其训练的效果。

图3 动态网络信号恢复的训练流程
2 传感器信号恢复
取机电作动系统指令信号作为输入信号,即x(t),在系统跟随指令运行过程中,相应的位置传感器测量系统实际输出y(t)。根据输入x(t)与传感器信号y(t)构建动态神经网络,并运用指令输入信号,对故障传感器信号进行重构。利用动态神经网络的记忆特性和自回归特性,基于正常工作情况下的数据进行神经网络的训练,不需要考虑原始传感器信号的状态,就可以利用正常工作情况下的历史值对未来状态信号进行重构。
基于实验室的飞控机电作动系统仿真平台完成了机电作动系统位置传感器数据的获取,并形成了指令信号-传感器信号的训练数据样本。
2.1 网络训练结果比较
根据指令信号-位移传感器信号组按照流程图3分别建立了非线性和NARX两种动态神经网络,并完成位移传感器的信号恢复。为了对这两种网络应用于机电作动器的性能和效果进行对比,两动态网络的网络参数相同。其中时延阶数设置为2,时延参数即网络反馈所需要的数据点数目;隐含层数目设置为20;网络学习方法都选取了寻优速度比较快的Levenberg-Marquardt(L-M)算法。图4和图5分别展示了非线性动态神经网络与NARX网络的网络训练以及网络线性回归结果的对比。图4中Epoch表示迭代次数;Time表示训练时间,与计算机性能有关;Performance表示网络性能,即网络误差;Gradient表示网络梯度,是网络停止训练的判据之一;Mu表示Levenberg-Marquard方法中的训练参数;Validation Checks表示网络验证失败次数,验证失败指网络误差经迭代后反而上升的现象。

图4 网络训练结果

图5 网络线性回归
对比结果可见:
(1)由图4中的Performance参数比较可得两个网络最终误差均较小,表明网络已经过正确训练并可用,其中NARX网络的误差更小;验证检查参数Validation Checks指神经网络利用训练样本训练模型的过程中,确认样本的误差曲线连续迭代不再下降的次数。其选取参考了网络误差,若网络误差上升则对其进行记录,默认上限设为6次,图中数值表明两者均在经历6次验证失败后终止训练。
(2)由图5可得非线性动态神经网络在训练集、验证集和测试集存在不拟合数据点,而NARX训练结束时网络整体拟合性良好。同时由图5(a4)、(b4)中的All相关系数可以看出,网络训练结束后,网络输出(Output)与期望输出(Target)形成的函数关系几乎为正比例函数,表明网络未发生过拟合现象,网络拟合良好,其中NARX网络相关系数更接近1,网络输出更接近真实值。
2.2 网络误差自相关及误差互相关比较
图6所示为非线性和NARX动态神经网络误差曲线的对比。

图6 网络响应相关图
自相关误差是用来估计训练样本和神经网络训练结果的相关程度,互相关误差用于得到不同输入和网络误差的相关程度。模型拟合的效果与两个误差在不同延迟下置信区间内的值的数量呈正相关[7]。由图6可知,NARX网络的两个误差相关系数比非线性动态神经网络要小近一个数量级,表明NARX网络具备了更好的性能,恢复结果更为准确。
2.3 信号恢复结果比较
完成动态神经网络的建立后,将网络应用于位移传感器信号恢复中,取信号前5个点的有效信息(长度约0.1 s)与指令信号输入至训练好的神经网络中,得到结果如图7所示。
图7所示为非线性动态神经网络与NARX网络预测恢复输出的对比,该结果仅利用原信号前5个数据点,模拟了信号丧失情况,通过对比分析实验结果得出:
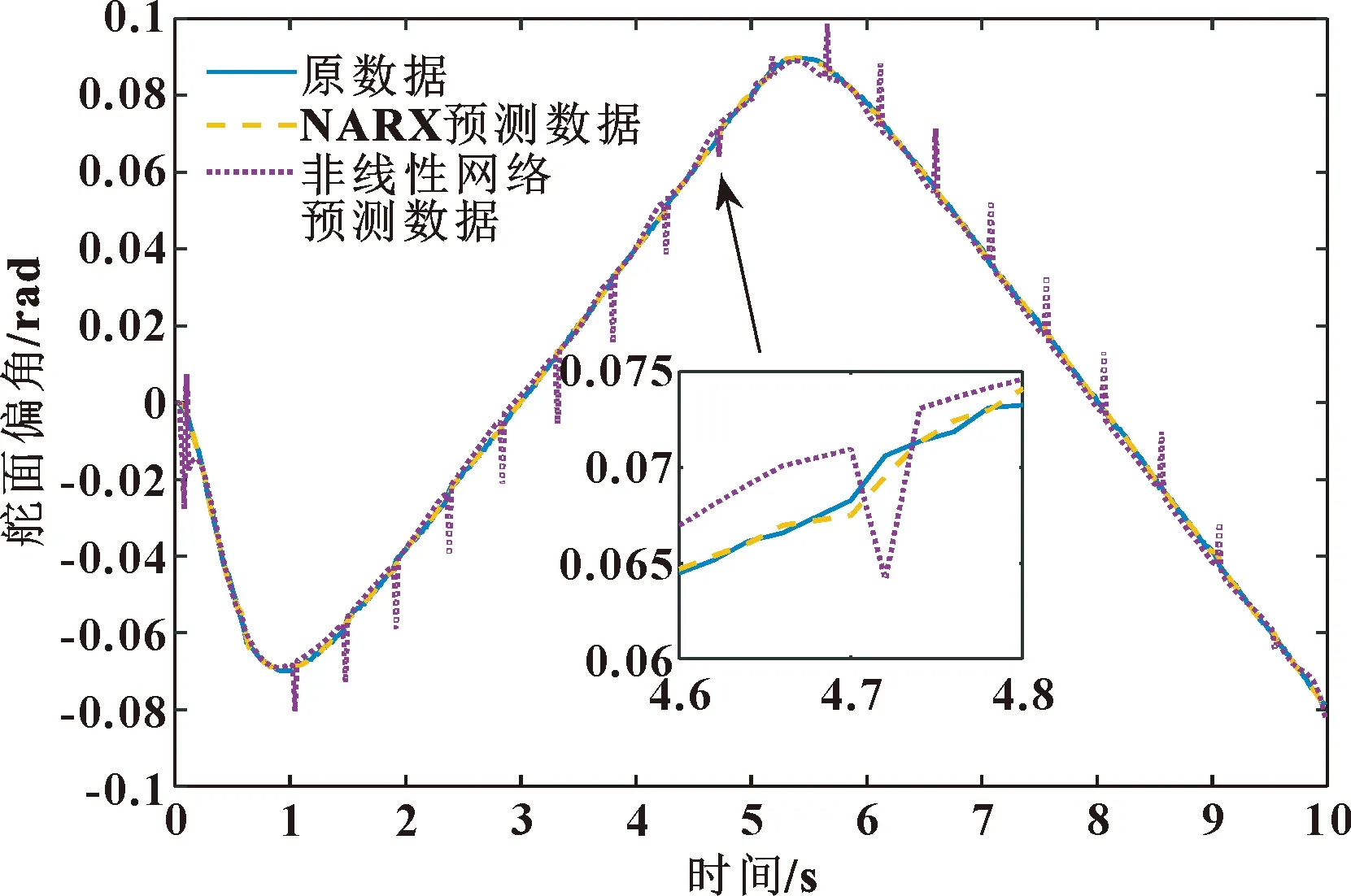
图7 动态神经网络信号恢复图
(1)相对于NARX网络,非线性网络为开环结构,传感器输出没有反馈到输入端,由于输入信息量的不足,其数据预测的准确性低。
(2)非线性网络在响应中出现了周期性的振荡波动,与原始数据的误差大。
(3)NARX网络具备良好的性能,与原始数据的拟合程度较好。
通过该结果分析可以得出:非线性神经网络为简单的开环结构,仅仅是时序信号之间的简单映射关系,因此会导致网络预测结果准确性较差;相比之下,NARX神经网络中实际传感器输出信号同时反馈到了输入端增加了网络信息量,因此NARX网络具备更加优秀的性能与恢复结果。考虑机电作动系统传感器信号具有的不确定性,NARX网络可以更加有效解决传感器故障后的信号恢复。
3 NARX网络优化
从前面的实验结果可得,针对文中的研究对象机电作动系统,NARX动态神经网络更适用。但是其参数设置规则多依靠工程经验和专家意见。目前的网络误差可以根据对参数设置的研究进一步减小。为了增加神经网络对信号重构的效果,对NARX网络参数进行优化,其中包括:时延阶数、隐含层节点数以及学习方法三方面的优化。
首先对不同学习方法下NARX网络均方误差进行研究,对比同样规格的NARX网络分别采用L-M与贝叶斯正则化学习算法下的网络均方差。由于即使在同一学习方法下的训练结果也不完全相同,实验对陷入局部最小值的特殊境况不做过多赘述,取10次训练结果的均方差平均值见表1。可以得到,同样规格的NARX网络,采用两种不同学习方式下,L-M算法的误差相对较小。

表1 L-M和贝叶斯正则化算法的误差对比
接下来对比不同时延阶数下NARX神经网络的误差。采用L-M学习算法,时延阶数分别设置为2、5、10、20四组。由表2可得:时延阶数越大,误差越小。由于阶数越高会导致计算速度的降低,选择时延阶数为5。

表2 不同时延阶数下NARX网络均方误差
最后对隐含层节点设置不同数量情况下的网络误差进行对比[8]。采用L-M训练学习算法,由表3可得:隐函层节点数越多,网络均方误差越小。

表3 不同隐含层节点数下NARX网络均方误差
通过以上分析可得:
(1)对比不同学习方法确定Levenberg-Marquardt算法具备了更小的误差,但该算法对计算机内存具有较高要求。
(2)网络性能随着网络结构的复杂化提升有所改善,如增大时延阶数或者增加隐含层节点数。但随着结构复杂化程度的增加,计算速度会降低。
(3)网络结构复杂引起训练时间的增加,这使得网络容易陷入局部极小值情况,导致神经网络无法得到满意结果,网络训练出现过早停止问题。
为了对机电作动系统中位置传感器故障信号进行恢复,采用L-M算法训练神经网络,根据前述神经网络参数优化确定网络时延阶数取5,隐含层节点数取20。通过对网络进行优化,可获得更加准确的恢复结果。
4 实验结果
为了验证故障信号恢复算法的有效性,基于所在实验室机电作动系统半实物仿真装置,针对故障传感器通过文中的动态神经网络算法进行信号恢复实验验证。此机电作动系统半实物仿真装置包括控制管理与状态监控计算机、故障注入箱、机电作动器,如图8所示[9],此实验装置可进行传感器故障注入实验。

图8 机电作动系统实验平台
系统工作原理为:控制管理与状态监控计算机负责发送机电作动器的位置指令和故障设置信息;故障注入箱负责设置具体故障并将位置指令和故障信息传递给机电作动器控制与驱动箱;机电作动器控制与驱动箱经过控制律计算发送电机指令驱动电机运动,通过反馈电流和位置传感器数据进行闭环控制,使机电作动器到达指令位置。实际位置同时通过故障注入箱反馈给控制管理和状态监控计算机进行位置指令和实际位置的显示对比。
本文作者开发的传感器信号恢复算法可放置在机电作动器控制与驱动箱板卡中,将位置指令信号和正常工作情况下的位置传感器信号作为输入数据,传递至所设计的NARX网络中进行信号恢复,以获得正确传感器信号来进行机电作动器闭环控制。
首先建立了传感器的故障模式,并进行了传感器故障注入实验,故障注入方法如图9所示。随后以位移传感器断开故障为例进行了传感器的信号恢复,将指令信号与故障前位移传感器信号输入至所设计的NARX动态神经网络中进行恢复,仿真与实验平台的恢复结果分别如图10(a)和(b)所示。图中指令信号选择为幅值0.1、频率0.1 Hz的正弦指令信号,在4 s时注入位置传感器信号断开的故障信号,算法将执行信号恢复过程。

图9 传感器信号断开故障情况下的舵面偏角

图10 传感器信号故障后恢复结果
结果表明:以正弦指令输入为例,所设计的基于NARX动态神经网络的传感器信号恢复算法有效解决了传感器非液态故障下的信号恢复,验证了文中所用NARX动态神经网络恢复方法的可行性和正确性。同时该方法可通过训练完成对其他输入信号类型的恢复。
5 总结与展望
由于飞控机电作动系统中传感器信号具有一定的随机性和不确定性,本文作者采用非线性和NARX两种动态神经网络对传感器故障后的信号进行恢复研究,通过实验对比两种网络的信号恢复效果,得到以下结论:
(1)非线性动态神经网络结构上是开环,没有反馈和记忆特性,仅是两个时序信号的非线性映射,网络输入信息量少,网络训练结果准确性不及NARX网络;
(2)NARX网络利用自身自回归特性,网络训练信息更为充分,具备了最佳的恢复结果;
(3)利用优化后的NARX网络可针对非液态故障,有效解决信号丧失下的信号恢复问题。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
卫星应用(2022年3期)2022-05-23
煤气与热力(2022年2期)2022-03-09
卫星应用(2022年1期)2022-03-09
北京航空航天大学学报(2021年4期)2021-11-24
汽车实用技术(2021年17期)2021-09-23
汽车观察(2021年4期)2021-05-10
汽车博览(2018年12期)2018-12-08
科学与财富(2018年28期)2018-11-16
软件(2017年6期)2017-09-23
