基于空时自适应调零的导航抗干扰技术研究
2022-10-24 13:38梁康贵肖玉林李鹏程
航天电子对抗 2022年4期
梁康贵,肖玉林,李鹏程
(电子信息控制重点实验室,四川 成都 610036)
0 引言
卫星导航定位系统能为用户提供精确的位置、速度、时间信息,在军民用领域发挥了至关重要的作用。但是由于卫星导航信号的发射功率低,到达接收机天线口面的典型信号功率为-130 dBm,低于噪声电平20 dB 左右,为负信噪比信号,并且由于卫星导航信号的工作频率和调制样式都是公开的,因此极其容易受到干扰。针对卫星导航信号易受干扰的薄弱点,目前已经开发了多种抗干扰技术,比如:频率滤波技术、时域滤波技术、伪卫星技术、卫导/惯导组合导航技术、自适应调零抗干扰技术。在众多的抗干扰措施中,自适应调零技术的抗干扰性能最优,不需要预先知道有用的卫星导航信号特性和干扰信号入射方向等先验信息,能使卫星导航接收机的抗干扰性能提升50 dB 及其以上,对强干扰环境中微弱导航信号的接收处理非常有效。
在自适应调零抗干扰算法的工程应用方面,由于多径效应或有意施加转发干扰等复杂的电磁环境因素,往往会存在相干干扰信号,常规的自适应调零算法会出现不能准确定位干扰方向、干扰抑制效果变差的现象。采用基于多零陷约束最小均方算法的自适应调零抗干扰技术、基于空间平滑算法的自适应调零抗干扰技术均能有效抑制相干干扰信号,提高自适应调零算法的稳健性和工程适应范围。本文主要研究了基于空时自适应处理(STAP)的卫星导航调零抗干扰技术,给出了STAP 算法模型,推导了权值优化处理实现方法,建立了七元圆阵自适应调零仿真模型,并结合“北斗”民用导航信号特性,进行了详细的抗干扰性能仿真和零陷能力分析,可为自适应调零抗干扰算法的工程应用提供技术支撑。
1 空时联合自适应调零算法模型
基于STAP 空时联合自适应调零抗干扰算法模型及信号处理架构如图1 所示。输入信号(包括有用信号和干扰信号)经过阵列天线接收,再经过下变频通道、A/D 数据采集,最后经调零波束形成网络进行干扰抑制处理,提高导航接收机的抗干扰性能。
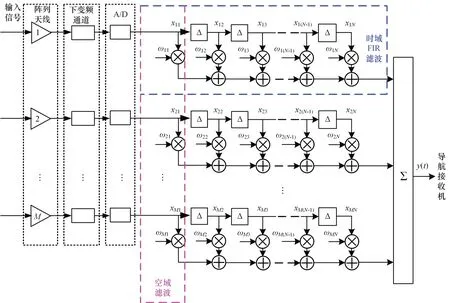
图1 空时联合自适应调零天线算法模型
空时联合自适应抗干扰的思想是将一维的空域滤波推广到空间与时间的二维域中,形成空时二维处理结构。从相同的时间延迟节点来看,不同的阵元构成了空域自适应滤波,可以分辨不同空间分布的干扰源,在干扰来向处形成相应的空域零陷来进行干扰抑制;从每个阵元通道来看,各级延时构成了FIR 滤波,可以在时域去除干扰,因此空时联合处理具有在空时二维域上剔除干扰的能力,较单纯空域滤波、时域滤波方法,具有更优的抗干扰性能。
设天线阵元数为,时间延迟单元数为,每个时间延迟单元的时间间隔为Δ。每个阵元接收信号总的延时长度为(-1)Δ。当接收信号入射到阵列上时,时刻第个阵元的第个抽头接收到的信号为x=(-τ-(-1)Δ),=1,2,…,;=1,2,…,,其中τ为信号到达第个阵元相对于参考点的延迟。设对应的空时二维加权系数为w,=1,2,…;,=1,2,…,,则阵列输出为:

设接收机以高于奈奎斯特频率对信号进行采样,则时刻,阵列的输出为:

式中,=[,,…,,,,…,,…,w,w,…,w]为×1维空时加权矢量,()=[,,…,,,,…,,…,x,x,…,x]为×1 维接收信号矢量。阵列的平均输出功率为:

式中,=()为空时二维自相关矩阵,根据线性约束最小方差准则,求最优加权矢量的问题可以描述为:

可求得最优加权矢量为:

式中,表示空时二维导向矢量,=S⊗S,其 中S=[1,e,...,e]为空间导向矢量,S=[1,e,...,e]为时域导向矢量,⊗为克罗内克(Kronecker)乘积。一般情况下,卫星导航信号的角度信息未知,可以令S=[1,0,…,0]。这种约束,适合于负信噪比的卫星导航信号进行抗干扰处理,能将大部分导航压制干扰信号的功率降低到噪声电平左右。
2 算法仿真研究
2.1 七元圆阵天线布阵仿真模型
均匀圆形阵在任意方向上天线口径相等,可以避免产生测向模糊。均匀圆形与线形阵相比,其波束具有可全向操控性,相同阵元数的均匀圆形阵列天线所占用的空间体积小。在下面的信号级算法仿真分析中,综合考虑阵列的旋转对称性和形成干扰零陷优缺点,选取七元圆型阵列天线,如图2 所示。为了避免出现栅瓣且尽量减小互耦,阵元间距设为半波长=0.5。有用信号功率为-130 dBm,环境噪声使用高斯白噪声进行模拟,噪声信号功率为-110 dBm,则输入信噪比为-20 dB。
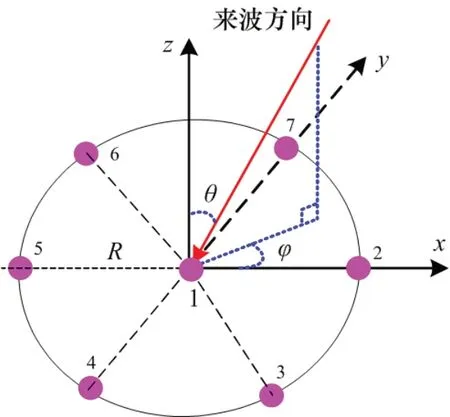
图2 七元圆阵阵列天线布局图
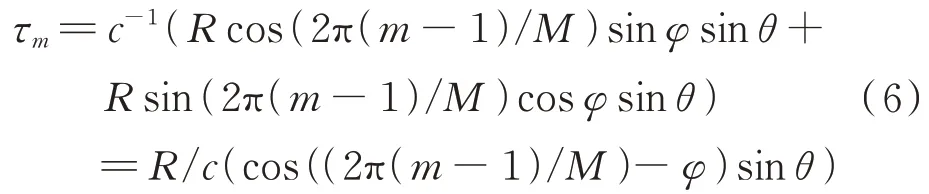
假设来波方向表示为(,),仰角为原点与信源的连线与竖直正向方向的夹角,∈[0,90],方位角是平面上投影和正轴方向夹角,∈[0,360]。通过计算输入信号到达各阵元时相对于参考阵元的时延,来确定阵列的方向矢量。对于个阵元而言,其对应的信号达到时间延迟为:
则相对于参考点的滞后相位ϕ为:

则方向矢量可以表示为:
2.2 不同时间延迟的空频响应分析
在仿真试验中,分别分析当时间抽头为1、2、10时,七阵元空时自适应调零天线对窄带干扰、部分带宽干扰和宽带干扰3 种不同类型信号的空频响应特性。考虑到“北斗”民用卫星导航信号B1I 的扩频码速率为2.046 Mcps,对应的信号带宽为4.092 MHz,在仿真中,部分带宽干扰、宽带干扰对应的信号带宽为分别为“北斗”B1I 民用导航信号带宽的50%、100%,即分别为2.046 MHz、4.092 MHz。干扰信号功率按照强干扰的仿真环境设定为-50 dBm,对应的干信比JSR=80 dB。干扰信号参数如表1 所示。
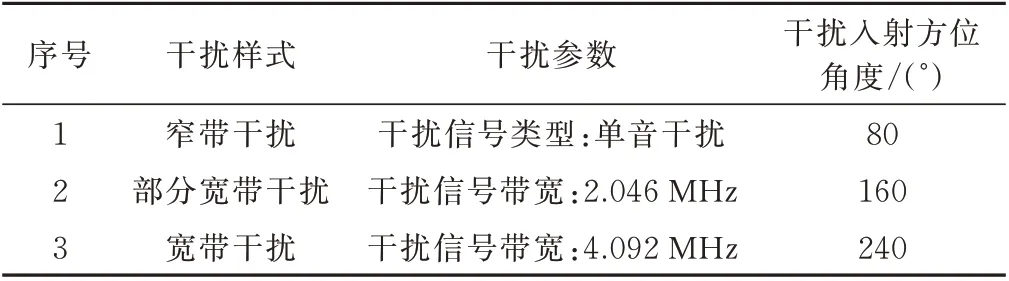
表1 干扰信号参数列表
不同时间延迟抽头对应的空频响应二维谱结果如图3 所示。

图3 不同时间延迟长度下空频响应二维谱
通过仿真对比分析可知:
1)当=1 时,自适应调零算法等价于单纯空域滤波抗干扰算法,无论窄带、部分带宽或宽带干扰,在干扰入射方向的整个导航接收机频段内均产生凹槽,表明单纯空域滤波算法不具备时域抗干扰能力。
2)当=2 时,空时联合调零算法有了频域分辨能力,对窄带干扰形成凹槽宽度开始减小,逐渐变为凹陷点,但此时对部分带宽干扰和宽带干扰形成的凹槽宽度还无明显变化。
3)当=10 时,可看出随着时间延迟线长度增加,空时联合调零算法在时域的抗干扰能力进一步增强,部分带宽干扰对应凹槽宽度逐渐减小,凹槽对应宽度与频带宽度相吻合。而宽带干扰由于覆盖全接收机频段,因此凹槽宽度保持不变。
通过仿真对比发现:空时联合调零算法相对于传统的空域滤波调零算法而言,除了具有空域抗干扰能力以外,还提高了时域的干扰分辨率,即具有在空时二维域上剔除干扰的能力。
2.3 多源干扰仿真分析
为验证空时联合调零算法对多源干扰的干扰抑制效果,在仿真试验中,阵元数=7,时间延迟抽头=10,得到四源、六源干扰抑制仿真结果如图4-5 所示。

图4 四源干扰抑制仿真结果
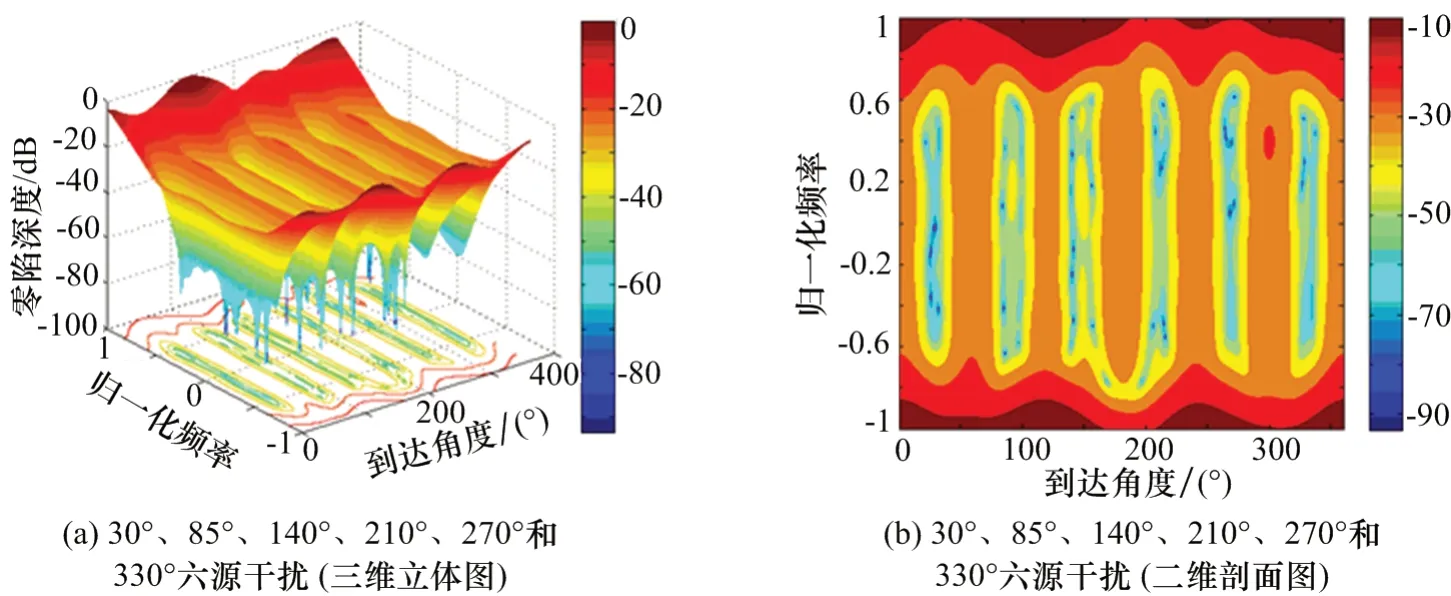
图5 六源干扰抑制仿真结果
通过以上仿真对比分析可知:当天线阵元数=7 时,空时联合调零处理算法能够形成的空域零陷自由度为6,可抑制6 个不同空间来向的干扰信号。
2.4 不同干扰功率条件下的零陷特性分析
为验证不同干扰功率条件下空时联合调零算法的抗干扰性能,采用七元圆阵仿真模型,时间延迟抽头=10,宽带干扰信号功率从-90 dBm 至-40 dBm进行变化,形成的零陷深度如表2 所示。 其中-60 dBm 和-50 dBm 干扰功率条件下的零陷深度如图6 所示,不同干扰功率对应的零陷深度对比分析如图7 所示。

图6 -60 dBm 和-50 dBm 干扰功率条件下的零陷深度
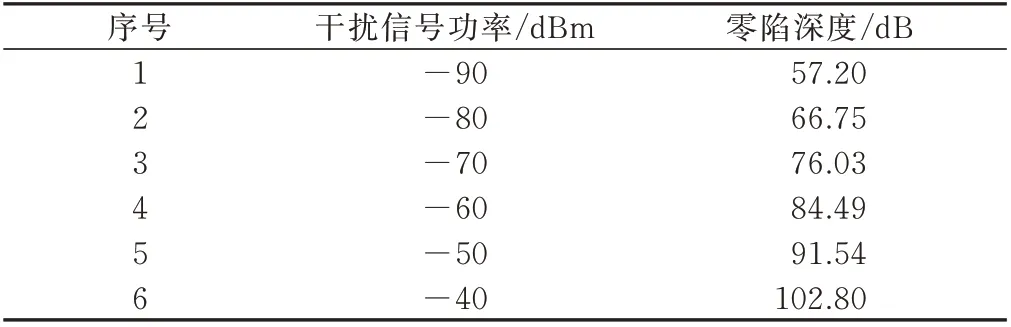
表2 不同干扰功率条件下形成的零陷深度

图7 不同干扰功率对应的零陷深度对比分析
对比仿真结果可以发现:基于STAP 空时联合算法的七元圆形阵列对单源宽带干扰信号具有较强的抗干扰抑制能力,并且随着干扰信号功率增强,形成的干扰零陷深度增加,干扰抑制能力逐渐增强。
3 结束语
本文对基于STAP 空时联合处理的自适应调零抗干扰算法进行了研究,计算推导了最优加权矢量,并在七元圆阵建模的基础上,对不同时间延迟条件下的空频响应特性、不同干扰功率条件下的零陷特性进行了仿真分析,验证了空时联合抗干扰算法具有在空时二维域上剔除干扰的能力,并且随着干扰信号功率增强,形成的干扰零陷深度增加,干扰抑制能力逐渐增强,可为卫星导航接收机自适应调零抗干扰算法研究和工程应用提供技术参考。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
计算技术与自动化(2022年2期)2022-07-04
中学生数理化·高一版(2021年11期)2021-09-05
现代信息科技(2021年21期)2021-05-07
现代职业教育·中职中专(2018年10期)2018-05-14
计算机应用(2016年10期)2017-05-12
科技与创新(2016年5期)2016-03-17
新高考·高一物理(2016年1期)2016-03-05
科技与创新(2014年7期)2014-07-03
考试·教研版(2013年11期)2013-09-26