无人机测流系统在铜仁水文的应用探索
2022-10-27 02:18徐光权李拉丁王程硼樊锴江
水利信息化 2022年5期
徐光权,李拉丁,王程硼,樊锴江
(贵州省铜仁市水文水资源局, 贵州 铜仁 554300)
随着中小河流、省界、市州界、大江大河水文测站的建设,水文测验方式需要改变,因此在水文测报工作中必然要采用新技术、新设备进行测验。近年来随着国内无人机测流技术的逐步应用和推广,无人机测流技术已逐步应用于大洪水及恶劣环境下的水文应急精准监测中[1-2]。搭载雷达波流速仪的无人机测流系统(以下简称无人机测流系统)是将雷达波流速仪集成在无人机上的一种测流方法,既解决了定点测流的空间位置局限的问题,又降低了流速快、面积广及受灾流域的测流难度,在降低人工测量危险系数的同时,提高了测量精度及工作效率。本研究在贵州省铜仁市茅溪水文站进行不同流速状态下的22次流量比测试验,分析无人机测流系统在水文应急监测时的应用条件。
1 系统分析
无人机测流系统主要由无人机平台、雷达波流速仪、高清摄像机、便携式计算机和打印机等5个部分组成。
1.1 测速原理
通过无人机平台搭载雷达波流速仪在河道断面指定垂线开展非接触式测速,雷达波流速仪将表面流速数据传至地面接收端。雷达波流速仪流速测量基于多普勒效应,探头斜向下发出雷达波,雷达波在照射到水体表面时被反射,由于多普勒效应,发出去的雷达波和接收到的反射波会产生多普勒频移 Δf,多普勒频移 Δf正比于流速,通过测量多普勒频移 Δf即可测量出流体的流速。无人机测流系统测速原理如图1所示。

图1 无人机测流系统测速原理示意图
无人机测流系统性能指标如表1所示。
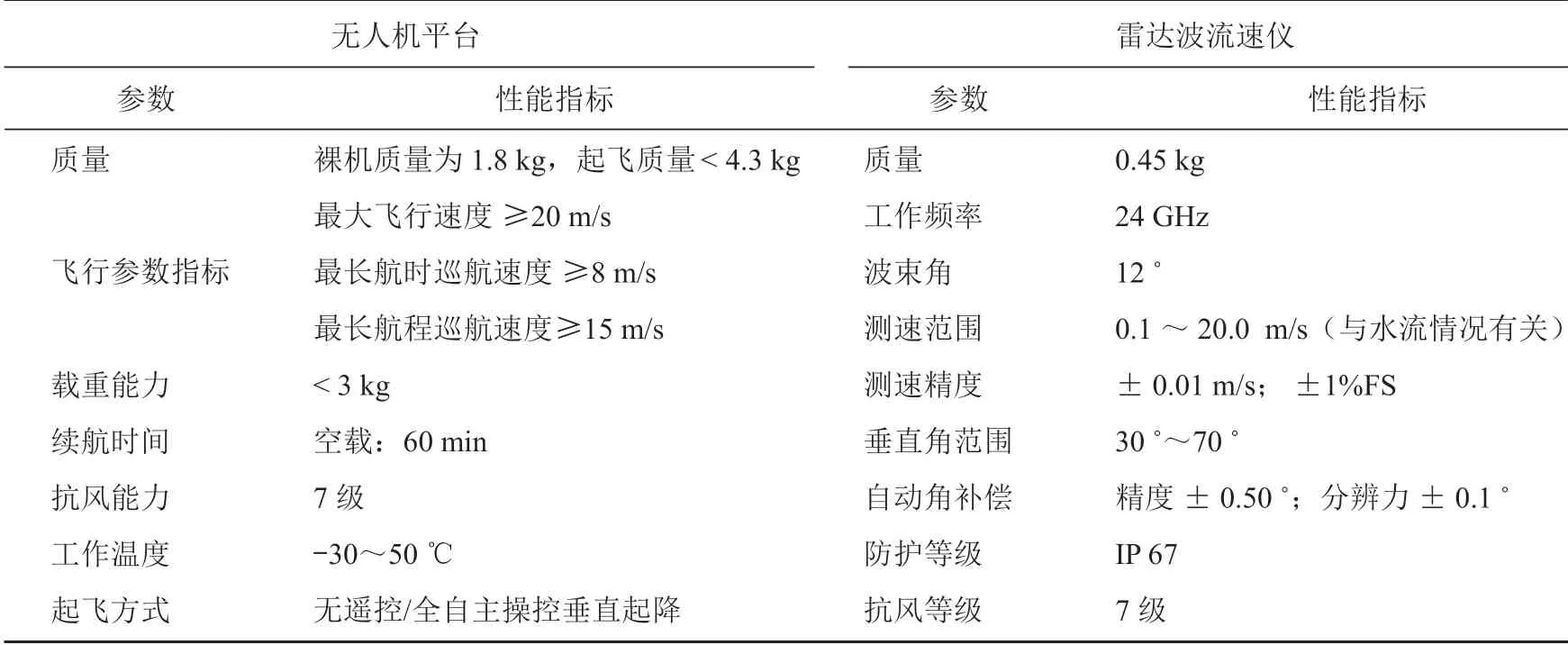
表1 性能指标
1.2 测验方法
流量测验采用流速面积法原理,即通过雷达波流速仪测得的垂线水面流速和借用的断面资料计算流量。由于河流横断面上的流速分布是不均匀的,因此采用函数式表示,即v=f(h,B),全断面流量采用积分法求得,即,也可用以下公式计算:
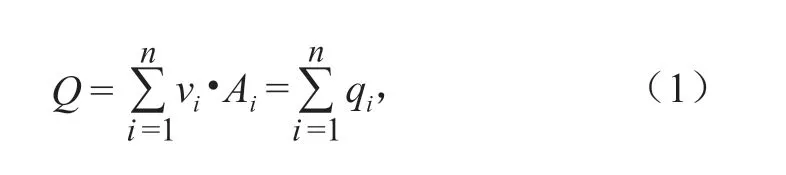
式中:h为垂线上某一点的水深;B为断面上某一点的起点距;i为断面上测速或测深垂线序号,i= 1,2,…,n;vi为第i部分断面平均流速;Ai为第i部分断面面积;qi为第i部分流量;Q为断面流量。
测流前,根据河道大断面情况预设航线,包括起点距、空中距离和悬停测速时间;测流时,无人机依次在指定垂线上空悬停测速,实时传回各条垂线表面流速数据,通过便携式计算机流量计算软件计算雷达波断面流量、平均流速等数据。
1.3 流速测量与计算
在设定的无人机悬停测流时间内,雷达波流速仪探头斜向下发出1束雷达波,接收反射波,取得1组数据。数据个数与水面波浪和漂浮物有关,流速高,波浪大,强反射多,数据个数就多;流速低,水面平静,强反射少,数据个数就少。在数据组中去掉 10% 的最大值和最小值,计算剩余数据的算术平均值即为流速值[3]。
1.4 流量计算
打开便携式计算机流量计算软件,通过蓝牙与无人机测流系统连接。新建断面或打开历史断面,依次输入起点距和河底高程,也可直接导入已有断面资料。断面信息输入完毕后,再选择测速垂线,按照任务需要,添加测速垂线。设置无人机运行高度、航线、雷达波流速仪测速历时。无人机起飞后,点击一键测流,可以获取垂线流速数据。所有垂线流速测量结束后,便携式计算机流量计算软件借用断面和垂线流速资料,可以一键导出符合规范的断面流量成果表,断面流量除以断面面积为断面平均流速。流量计算流程示意图如图2所示。
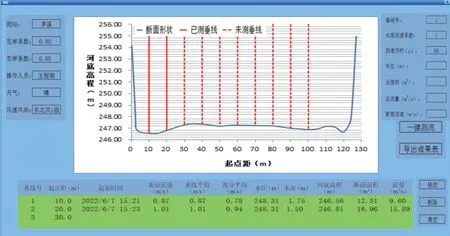
图2 便携式计算机流量计算软件流量计算流程示意图
2 比测试验
为推广无人机测流系统,贵州省铜仁市水文水资源局于 2022年4—7月就无人机测流系统使用方法、流量测验精度、测验过程中存在的问题等方面进行了比测试验。为达到比测试验目的并考虑比测试验能代表贵州山区性河流特性,选择在茅溪水文站(国家基本站,二类精度站,集水面积为1738km2)进行比测试验。在比测试验期间,河道内没有发生较大洪水,没有收集到高水比测试点数据。根据GB 50179—2015《河流流量测验规范》总则第 1.0.4 条“使用新的流量测验技术,应采用本规范推荐的流量测验方法进行比测试验,并进行成果精度评定;多线多点流速仪法的流量测验成果可作为率定或校核其他测验方法的标准。”[4]1[5]的规定,以水文缆道流速仪法流量测验结果为标准,分析无人机测流系统实测水面流速及流量测验误差。
2.1 比测方法
茅溪水文站测验河段基本顺直,河道为宽浅型,水面宽在 120~125 m 之间,断面冲淤变化不大,历年水位流量关系线为单一线。本次比测选定在茅溪水文站不同水位级(流速)下进行,分别采用水文缆道流速仪法与无人机测流系统进行多线(测速垂线布置10条,起点距分别为 10,20,30,40,50,60,70,80,90,100 m)水面 0.0 一点法测速。无人机测流系统在茅溪水文站基本断面上空(距离水面 10~30 m),与水文缆道流速仪法布设测速垂线一致,同时测量各条垂线水面 0.0 处流速,视水位变化快慢测速历时设定为 60~100 s。根据流速面积法原理,借用大断面资料,计算断面流量和平均流速等数据。
2.2 比测设备
本次比测试验的水文缆道控制系统[6]、转子式流速仪及无人机测流系统等设施设备均经厂家检定为合格产品,所测数据真实可靠。水文缆道流速仪法起点距采用水文缆道定位,大断面测宽、垂线测深比测率定符合 GB 50179—2015《河流流量测验规范》要求。
2.3 比测误差
流量测验误差可分为随机、未定系统、已定系统、伪误差等,其中:随机误差应为正态分布,采用置信水平 95% 的随机不确定度表述;未定系统误差,应采用置信水平不低于 95% 的系统不确定度表述;已定系统误差应进行改正;含有伪误差的测量成果必须删除。
2.3.1 水面平均流速误差分析
在茅溪站选用水文缆道流速仪水面 0.0 法与雷达波流速仪水面 0.0 法进行对应垂线定点测速,取得断面平均流速样本22次。以水文缆道流速仪法计算的断面平均流速v水面为真值,计算无人机测流系统雷达波流速仪所测断面平均流速v雷达波的相对误差,最大正误差为 13.90%,最大负误差为 -3.65%,系统误差为 2.18%。点绘v水面和v雷达波关系图,作相关分析,两者有较好的线性相关关系,即v水面= 0.9844v雷达波,相关图如图3所示。
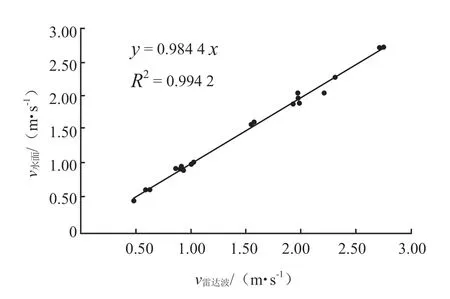
图3 茅溪站 v水面 和 v雷达波 关系图
利用v水面= 0.9844v雷达波改正无人机测流系统测速结果,采用改正后的样本进行误差分析,v雷达波系统误差为 0.58%,小于 ±1.0%,系统误差满足 SL/T 247—2020《水文资料整编规范》要求[7]7-8。
2.3.2 流量测验误差分析
2.3.2.1 影响流量测验精度的主要原因分析
1)风力风向对流速精度的影响。雷达波流速仪测量水面流速时,水面如果有风,顺风时水面流速会增大,逆风时水面流速会减小。水面流速越大,测验精度受风的影响相对越小;水面流速越小,影响相对越大[8]。本次比测试验时同时观测风向和风力等级,风力均小于7级,满足无人机测流系统性能指标。
2)测速角度与历时的影响。从理论上讲,在测速角度上,雷达波流速仪测速探头波束角越大,与水面接触越小,回波信号越弱;反之,与水面接触越大,回波信号越强。本次比测试验满足无人机测流系统雷达探头发射电磁波束角为 12° 的要求。在测速历时上,流速越大,雷达波流速仪每秒测得的流速数据越多;流速越小,每秒测得的流速数据越少。本次比测试验测速历时为 60~100 s,满足GB 50179—2015《河道流量测验规范要求》[4]79。
2.3.2.2 水面流速系数分析
水面流速系数是垂线(断面)平均流速与垂线水面点(水面平均)流速的比值。茅溪站由于没有进行垂线多点法(五点法)施测,只能以比较接近天然河流的对数型垂线流速分布公式为依据,采用流速仪法相对水深 0.6 测点流速代表垂线平均流速,作为垂线平均流速的标准值。将茅溪水文站水文缆道流速仪法施测的垂线相对水深 0.6 与水面 0.0 测点流速进行比较,分析确定水面流速系数。经分析茅溪水文站水面流速系数为 0.859,相关图如图4所示。
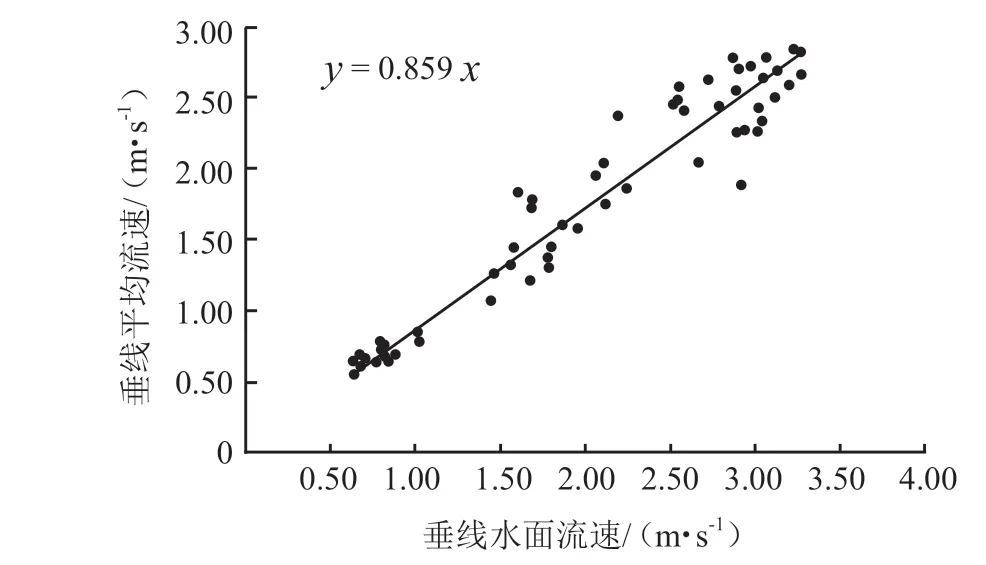
图4 茅溪站垂线平均流速与水面流速相关图
2.3.2.3 实测流量误差分析
本次比测试验将无人机测流系统施测的垂线表面流速,采用 2.3.1 分析的v水面和v雷达波相关系数 0.9844,再乘以经分析的茅溪水文站水面流速系数 0.859,求得无人机测流系统施测的垂线平均流速,通过便携式计算机流量计算软件,借用断面资料,可得无人机测流系统施测的断面流量。
茅溪水文站水位流量关系线为单一线,本次比测将无人机测流系统施测的断面流量(以下简称无人机测流系统流量)与同水位下茅溪水文站水文缆道流速仪法得到的流量(以下简称流速仪法流量)进行比较,作无人机测流系统流量误差分析,流量误差分析结果如图5所示。
河道内没有发生较大洪水,没有收集到高水比测试点数据,比测试验的水位级为中(低)水,比测试验点相对误差参照 SL/T 247—2020《水文资料整编规范》水位流量关系合并定线精度指标进行控制[7]7-8,指标如表2所示。
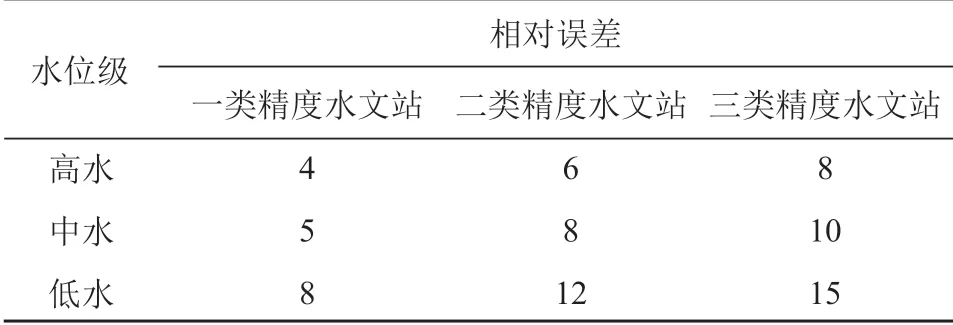
表2 水位流量关系合并定线精度指标表%
图5 中只有 2022-05-05T16:06 测量的流量误差超过 10%,查阅相关数据发现,此时间所测水位为所有水位中最低值(247.85 m),断面平均流速为最低(0.42 m/s),其他时间所测流速均大于 0.50 m/s。可以看出:当断面平均流速大于 0.50 m/s 时,无人机测流系统施测的断面流量数据与水文缆道流速仪法测量数据基本一致,误差均在 ±8.0% 之内;当断面平均流速小于 0.50 m/s 时,误差超过 ±12.0%,无人机测流系统在低速(低水)测量性能不好。

图5 无人机测流系统流量误差分析图
2.4 比测结论
无人机测流系统是一种非接触式测流方法,测速时不受含沙量、漂浮物影响,也不受水质、流态影响,适合洪水陡涨陡落时应急监测。
无人机测流系统雷达探头发射电磁波束角为12°,运行高度为 10~30 m,运行高度越低,测速精度越高;但当运行高度低于10m 时,无人机测流系统悬停会对水面产生风力扰动影响,导致测速误差偏大。
无人机测流系统适合在高速应急监测条件下的流速测量,在河道水面流速超过 0.50 m/s,风力低于7级情况下运行,测量精度能够满足生产需要。
通过茅溪水文站比测试验,无人机测流系统施测的垂线表面流速,采用该站分析的水面流速系数、水文缆道流速仪法水面流速与雷达波流速仪测速相关系数,借用近期断面资料,可计算流量。无人机测流系统施测的断面流量数据与水文缆道流速仪法测量数据基本一致,误差均在 ±8.0% 之内。
3 结语
历时 4月,在茅溪水文站采用水文缆道流速仪法与无人机测流系统进行多次比测,实践表明:在满足运行高度、风力条件、河道水面流速条件时,无人机测流系统在铜仁地区可作为河道流量应急监测的一种安全便捷有效的方法加以推广应用。今后在无人机测流系统测流时应该关注以下几点:
1)测流时如存在水流低速,风力风向及船行都会造成水面流速的误差,无人机搭载雷达波流速仪在河流上空悬停时的抖动也会造成水面测速的误差。在实际选用设备和测试过程中应尽量规避这些情况,统计和计算时应考虑这些误差的影响。
2)无人机测流系统不能在中到大雨情况下运行,运行场地应尽量开阔,运行周围尽量避开高大建筑物或高压线路等障碍物。
3)茅溪水文站雷达波流速仪所测断面平均流速相关、水面流速等系数是通过大量实测资料和数据统计分析得到的,不适用其他水文站和断面。
4)本比测试验以转子式流速仪测得数据为标准值,根据测验现场实际情况,在实际使用中也可使用走航式 ADCP 进行比测,但用于比测的走航式ADCP 必须经过转子式流速仪的量值传递才能作为标准值参与比测。
猜你喜欢
治淮(2022年11期)2022-12-03
水资源开发与管理(2022年9期)2022-10-14
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
中国农村水利水电(2022年2期)2022-02-23
新世纪智能(教师)(2021年2期)2021-11-05
小学生学习指导(中年级)(2021年10期)2021-11-01
大众科学(2020年7期)2020-10-26
小天使·六年级语数英综合(2018年1期)2018-10-08