永磁同步电机伺服控制(连载之三)模糊逻辑速度控制基于自适应调节的性能优化
2022-11-10 04:30黄依婷房钰超王云冲陈毅东沈建新
微电机 2022年10期
黄依婷,房钰超,王云冲,2,史 丹,2,陈毅东,沈建新,2
(1. 浙江大学 电气工程学院,杭州 310027;2. 浙江省电机系统智能控制与变流技术重点实验室,杭州 310027;3. 深圳市兆威机电股份有限公司,广东 深圳 518000)
0 引 言
因传统PI控制依赖于被控对象精确的数学模型而鲁棒性不佳,故现阶段永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)伺服控制系统多采用滑模控制[1]、模糊逻辑控制(Fuzzy Logic Control, FLC)[2]、自适应控制[3]等鲁棒性更强的现代控制策略。
固定参数的FLC不能在任意工况下获得最优性能,为解决这一问题可采用自适应模糊逻辑控制器(Adaptive Fuzzy Logic Control, AFLC)来替代传统的FLC,AFLC通过实时在线调整控制器参数来适应外部条件的变化,以保持系统性能的稳定。文献[4]利用收缩膨胀因子实时调节模糊PID控制器输入、输出论域对应的数值范围,实现变论域模糊逻辑控制,仿真结果证明基于该方法的无刷直流电机驱动系统具有更快的动态响应和更强的鲁棒性,但其收缩膨胀因子的设计需满足一系列构造原则,涉及众多参数的调整,实现难度大。文献[2,5]用AFLC替代传统的PI控制器,根据速度误差自适应调整输出比例因子,解决了稳态时FLC输出电流谐波含量较大的问题,后者还提高了系统的直流母线电压利用率和弱磁能力,但二者没有考虑到FLC输入比例因子对系统性能的影响。文献[6,7]利用模糊规则在线调整FLC的输入、输出比例因子,以改善传统FLC的性能。
还有学者提出模糊模型参考自适应控制方法,利用参考模型和实际模型输出量的差值,通过改变输出隶属度函数中心点的方式来实时调整规则库,以改善FLC的性能[8],但该方法较为繁琐,还需设计恰当的参考模型。故文献[9]设计了一种简化自适应机制,直接通过速度误差调整FLC的输出隶属度函数,使其可在各种工况变化条件下保持优良的控制性能,最终仿真结果证明其性能优于模糊模型参考自适应控制方法,但此方法涉及梯度算法,需额外确定控制收敛速度的学习步长。
基于以上分析,本文针对固定参数的FLC无法在任意工况下获得最优性能的问题,设计了一款AFLC,它根据速度误差变化率及速度误差实时调整其输入、输出比例因子,在保持系统结构较为简洁的前提下,提高了传统FLC的鲁棒性,使得控制器在系统转动惯量发生较大变化时仍可保持较优的速度动态响应性能,同时降低了FLC输出电流中的谐波含量。
1 AFLC的设计
传统PMSM速度伺服的FLC详见本系列论文的连载之二。在此基础上,本文提出的自适应模糊逻辑控制器的基本原理图如图1所示。
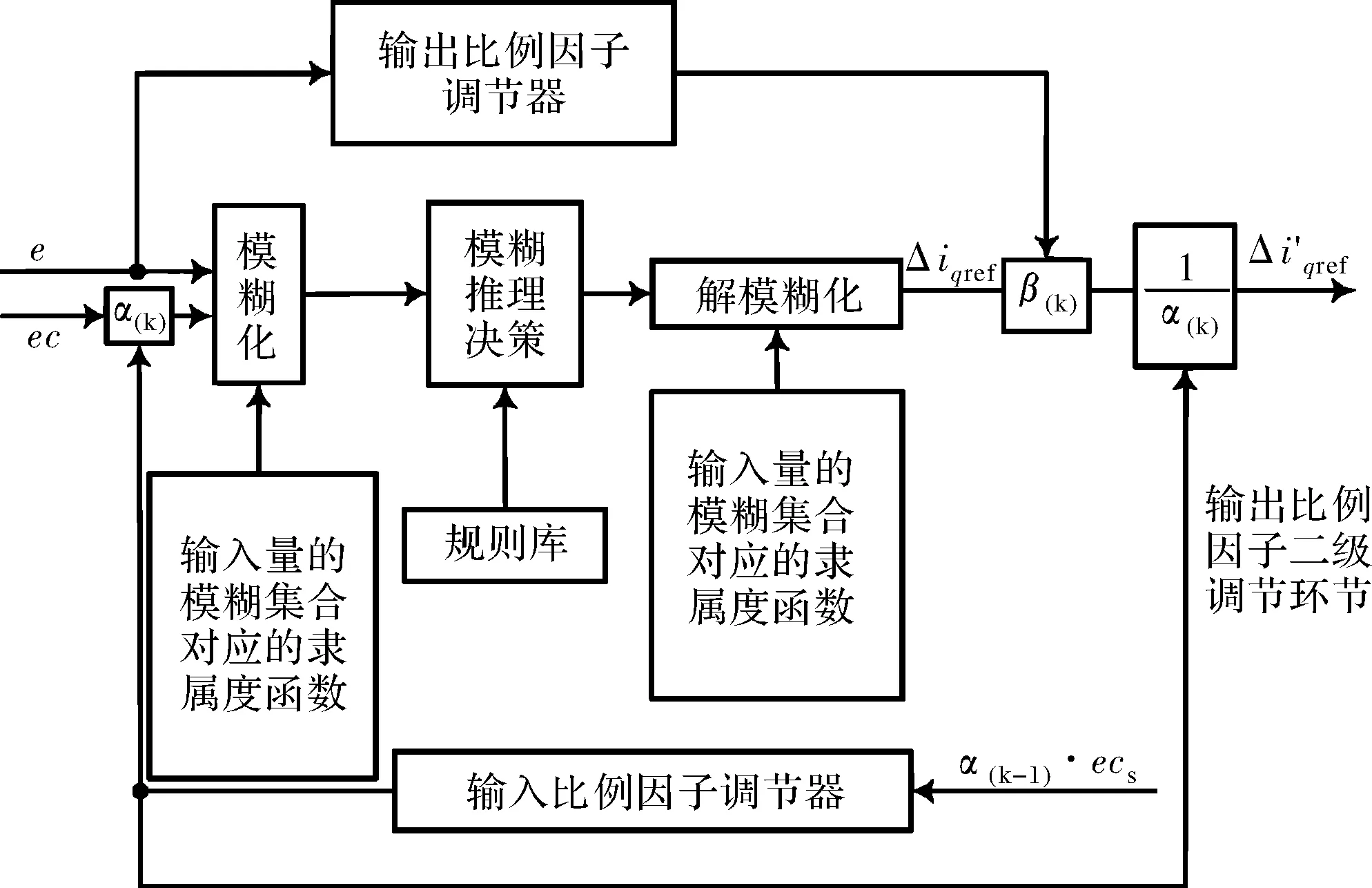
图1 AFLC基本原理图
图中,α为ec对应的输入比例因子,β与1/α的乘积为输出比例因子,α(k)代表此时α的值,α(k-1)代表上一采样时刻α的值。本文所提出的AFLC根据ecs与α(k-1)的乘积,利用输入比例因子调节器,实时改变输入比例因子α的值,以优化速度动态响应的性能,增强速度环的鲁棒性。同时,根据速度误差e,利用输出比例因子调节器,实时改变输出比例因子β的值,实现输出比例因子的一级调节;最后,利用输入比例因子α的倒数实现输出比例因子的二级调节,以减小速度环输出给定电流中的谐波含量。
下面详细介绍AFLC输入、输出比例因子的具体调节规律。
1.1 输入比例因子的调节规律
为了在负载转矩TL发生变化时保持速度响应的优良动态性能,ec对应的隶属度函数有两个较宽的数值区域(见连载之二)。这种情况下,ecs的变化范围较小,通过适当拓宽NM-NS、PM-PS对应的数值区域(减小NS、PS对应数值的绝对值,增大NM、PM对应数值的绝对值),即可保证ecs始终落在理想区域中间。但此区域范围不可过宽,否则会导致一定工况下,FLC对ec变化不敏感,整体控制性能变差。
除负载转矩TL以外,系统的转动惯量J也可能发生较大的变化,此时,ecs会随之发生较大的变化(成倍数变化),极有可能落到隶属度函数理想的数值区域边缘或外部,导致速度响应无法达到最优的性能。此时若继续拓宽固定数值区域的范围,FLC对ec的变化将变得不再敏感,反而导致控制器性能变差。

图2 输入比例因子α自适应调节器的程序流程图
为解决这一问题,当惯量J发生变化时,本文不再以单独拓宽NM-NS和PM-PS对应数值范围的方式来保证ecs始终落到该区域中间,而是根据ecs的大小,对整个数值区域总体进行动态调整,以保证FLC对ec变化的敏感性,即引入输入比例因子α,通过实时调节其数值,来保证α·ecs始终能够落到理想的数值区域中间。具体实现方式如图2所示。这里的1.1和0.9可以视系统情况有所调整,应分别是略大于1和略小于1的数。
1.2 输出比例因子的调节规律
采用FLC的控制系统,速度动态响应的过程中,应使Δiqref保持一个较大的数值,以满足快速性要求;而速度响应达到稳态后,若Δiqref的数值过大,将会使速度环输出给定电流iqref中包含大量的谐波,进而增大转矩脉动和谐波损耗[2]。为了兼顾动态和稳态性能,本文在传统FLC的基础上引入一个输出比例因子β,并利用输出比例因子调节器实时改变其数值:暂态过程中令β保持一个较大的值以保证速度调节的快速性;达到稳态后减小β的值以确保Δiqref不会太大,以限制iqref的变化范围,降低其谐波含量。
与此同时,达到稳态后,也不可过分减小Δiqref的值,因为这会导致iqref无法根据转速快速变化,最终使得控制器对转速的控制能力降低,转速波动增大,所以需要为β设置一个下限值,经过多次仿真调试参数,使系统运行在最佳状态,本文为β设置的下限值为0.3。本文所使用PMSM伺服电机的参数如表1所示。对于不同电机,β的下限也有所不同。
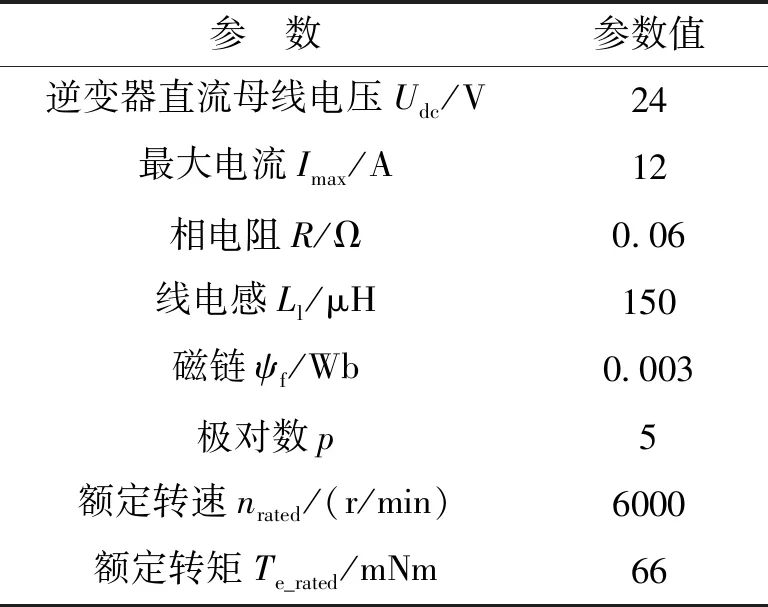
表1 电机基本参数
根据以上原理,输出比例因子β自适应调节器的程序流程如图3所示。图中eth为速度误差的阈值,当e的绝对值小于该阈值时,判断速度响应达到稳态。若eth的取值过小会使得速度误差e始终无法落到该限定区域内,进而导致β自适应调节器失去作用;而其取值过大,会使得Δiqref的值在速度误差较大时减小,从而减缓电流调节在动态过程中的速度,导致控制性能恶化。
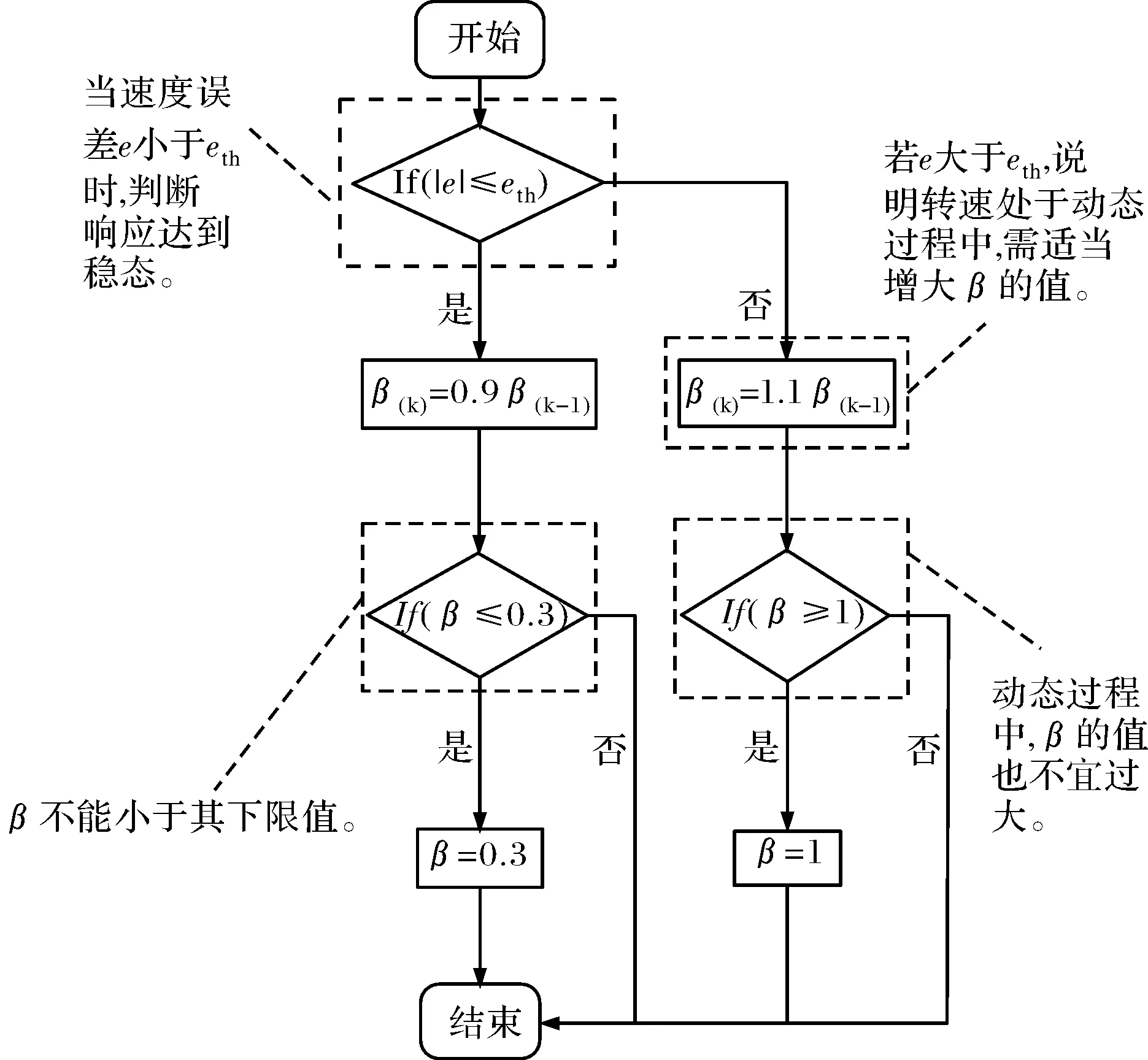
图3 输出比例因子β自适应调节器的程序流程图
所以令该阈值自动调整是最佳的方案,即速度响应进入稳态后,若速度误差|e|始终大于eth,则增大eth的值;若速度误差|e|始终小于eth,则减小eth的值,如式(1)所示[2]。式中,系数1.01和0.99分别是略大于1和略小于1的数,需根据实际系统有所调整。
(1)
在设计输出比例因子调节器的过程中,为了使电流能够跟随转速快速变化,以保证控制器对转速的控制能力,调节器为β设置了一个下限值。当系统转动惯量J增大时,转速变化相对缓慢,如图4所示,相同的速度波动区间内,电流iqref可以有更长的调整时间,所以Δiqref下限值可以适当缩小;相反,当惯量J减小时,转速变化加快,相同的速度波动区间内,电流iqref的调整时间缩短,所以该下限值也应适当增大以提高速度控制的快速响应。
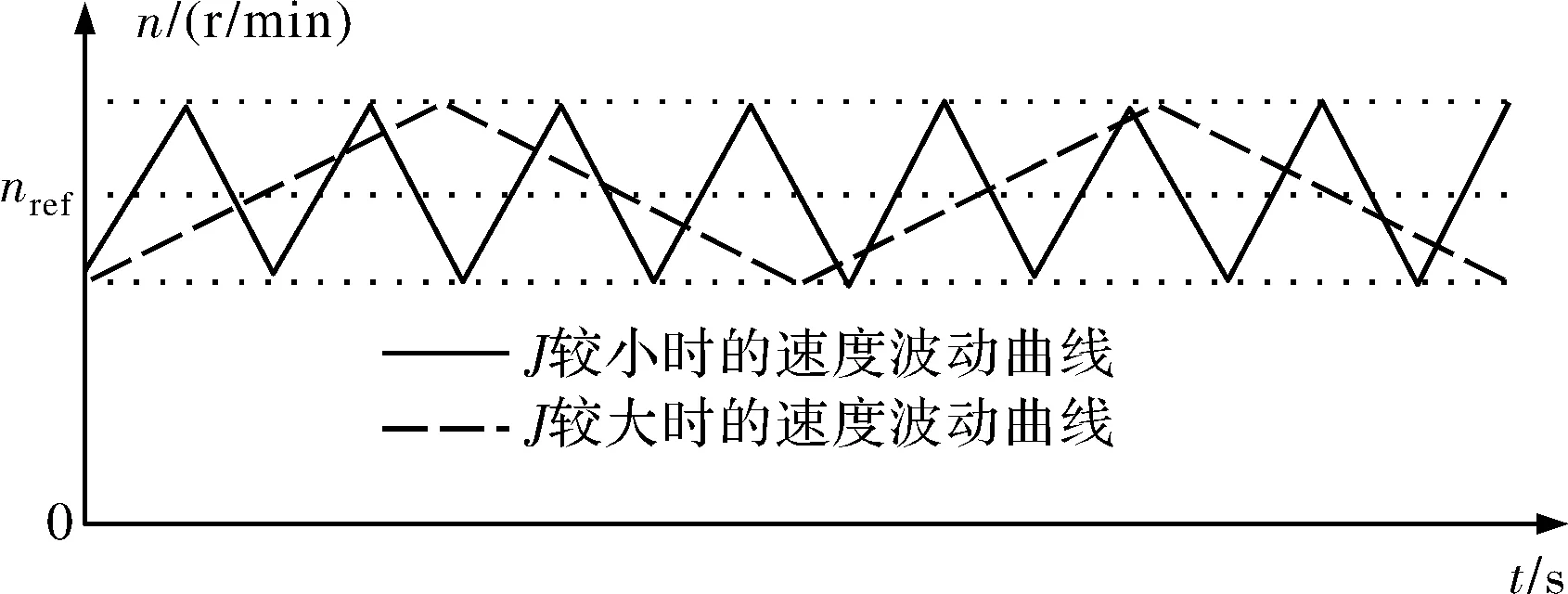
图4 不同转动惯量下的速度微观波动示意图
基于以上分析可知,应在惯量J增大时,缩小β的下限值;J减小时,增大β的下限值。但直接根据转动惯量J的大小,在输出比例因子调节器中实时调节该下限值的方法较为繁琐,所以本文在AFLC的最后引入输出比例因子自适应调整二级环节,来间接调整该下限值:当J增大时,令β乘以一个小于1的数;当J减小时,令β乘以一个大于1的数。因ec的输入比例因子α也是根据转动惯量的变化进行调节的:当J增大时,α增大(α>1);当J减小时,α减小(α<1),这与二级输出比例因子随系统惯量J的变化规律相反,故可将其倒数作为FLC的二级输出比例因子,如图1中最后一个模块所示。
2 仿真验证
为了验证自适应模糊逻辑控制器的性能,对不同工况下,常规FLC与AFLC的速度动态响应以及抗扰性能进行了仿真分析,并将FLC和AFLC控制下的速度环输出给定电流波形进行了对比。仿真所采用的电机及逆变器参数见表1。
图5为系统转动惯量J=1.86×10-5kg·m2(小惯量),负载转矩TL=0 mNm,给定转速在1000 r/min与6000 r/min之间变化时,FLC和AFLC的速度响应以及速度环输出给定电流仿真波形图。稳态时,相较于FLC而言,AFLC输出电流中的谐波含量更少。图6为图5中FLC与AFLC的速度响应暂态过程的局部放大图。此工况下,二者速度响应较快且几乎没有超调。
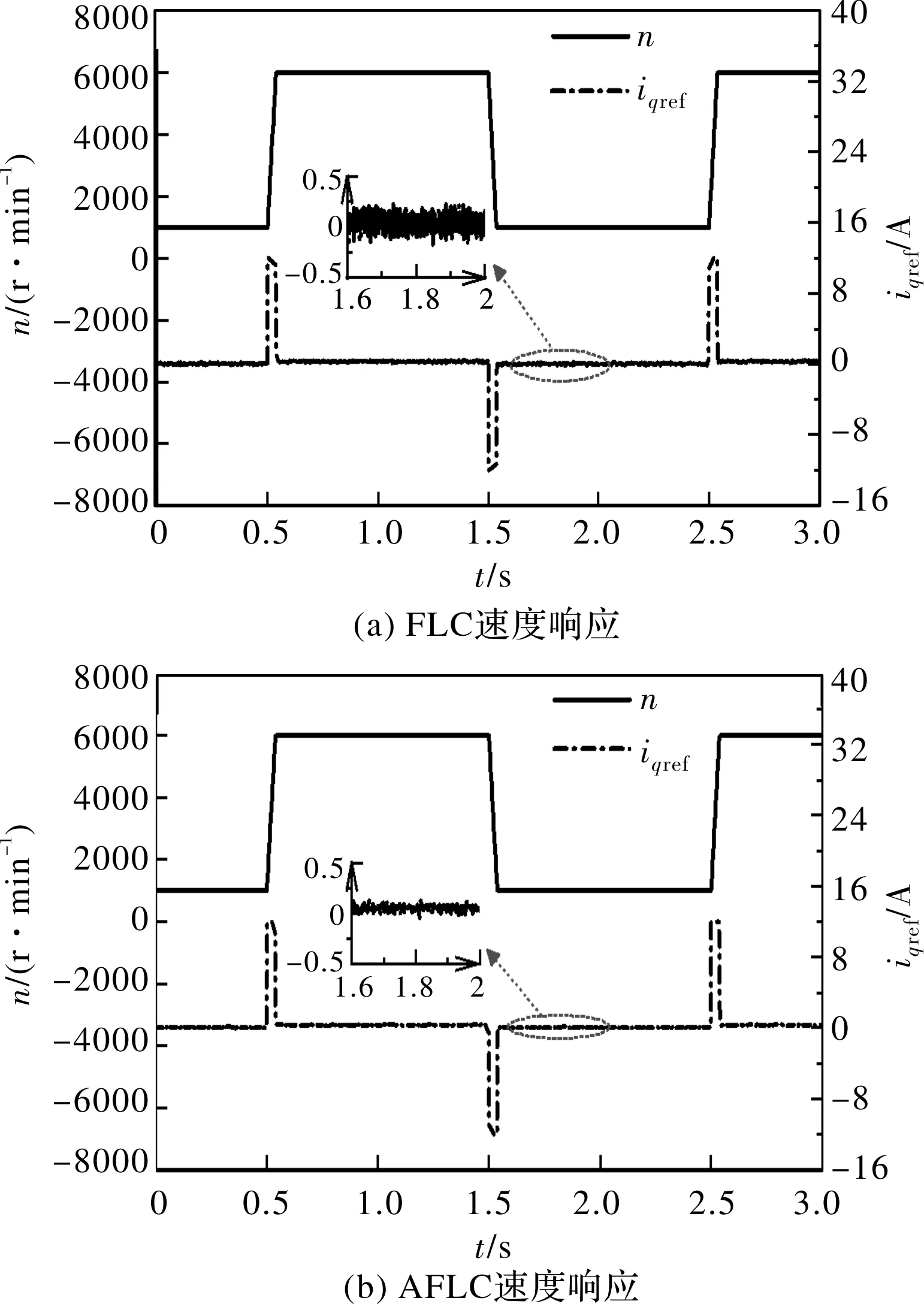
图5 两种控制器速度响应的仿真结果(空载小惯量)
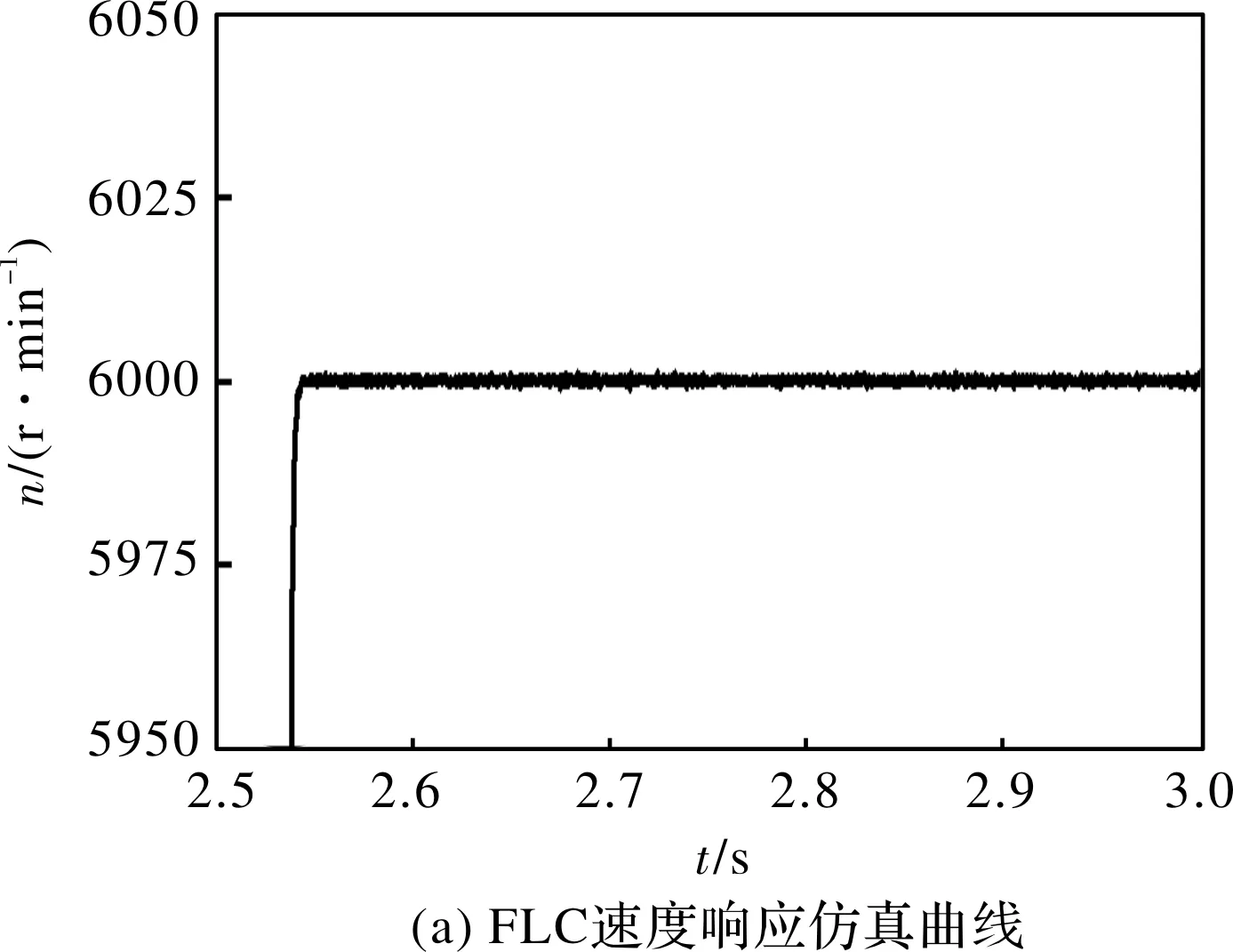

图6 FLC和AFLC的速度响应仿真波形局部放大图(空载小惯量)
图7为TL=66 mNm(满载),系统惯量J=2.91×10-5kg·m2(大惯量),nref在1000 r/min与6000 r/min之间变化时,FLC、AFLC的速度响应以及输出给定电流仿真波形图,可见FLC输出电流谐波含量明显高于AFLC。图8为图7中FLC、AFLC速度响应的局部放大图,可以看出FLC的速度响应出现超调,AFLC具有更好的速度伺服性能。
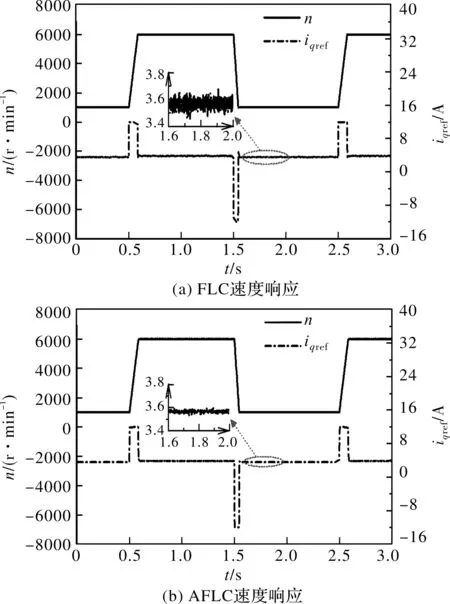
图7 两种控制器速度响应的仿真结果(满载大惯量)
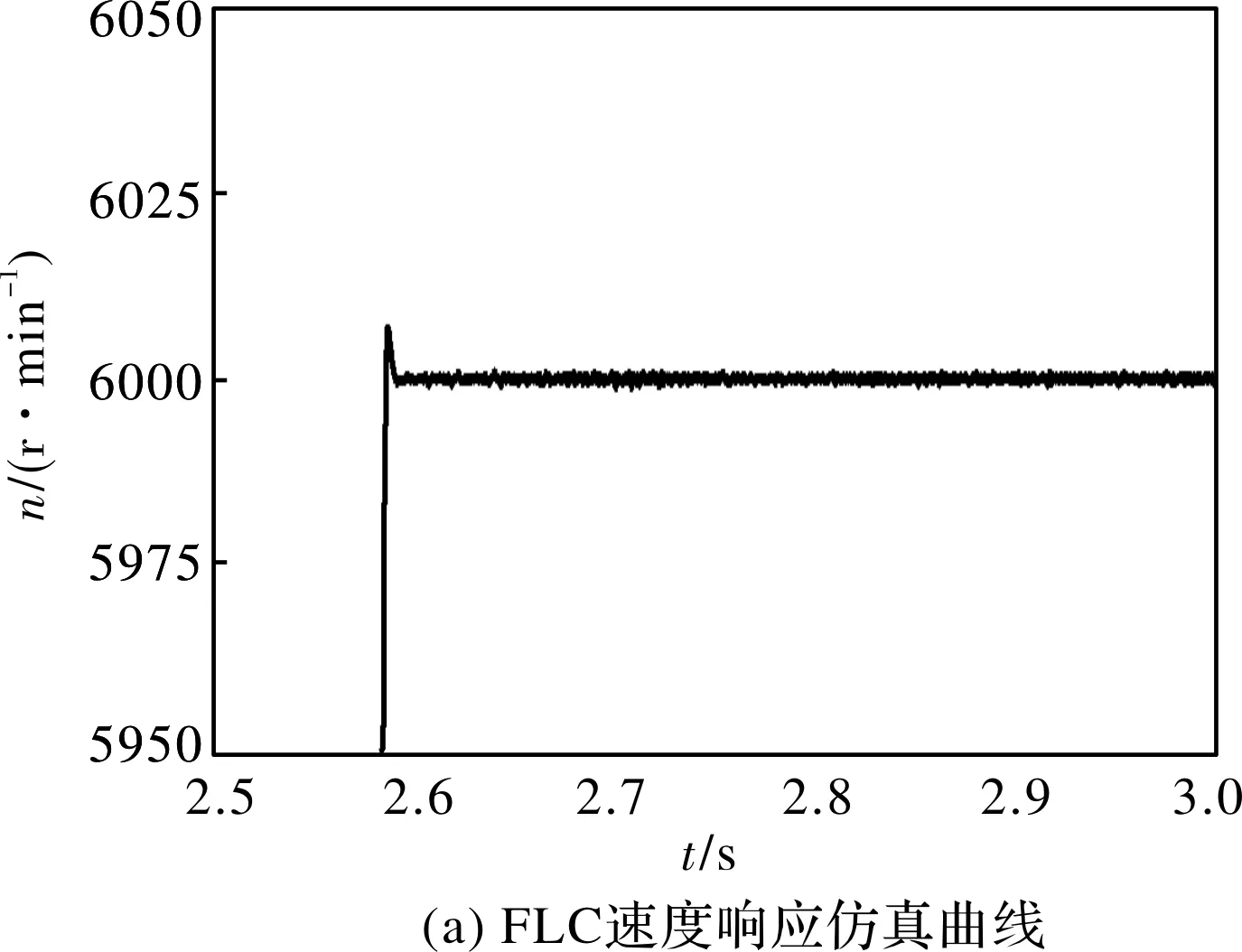
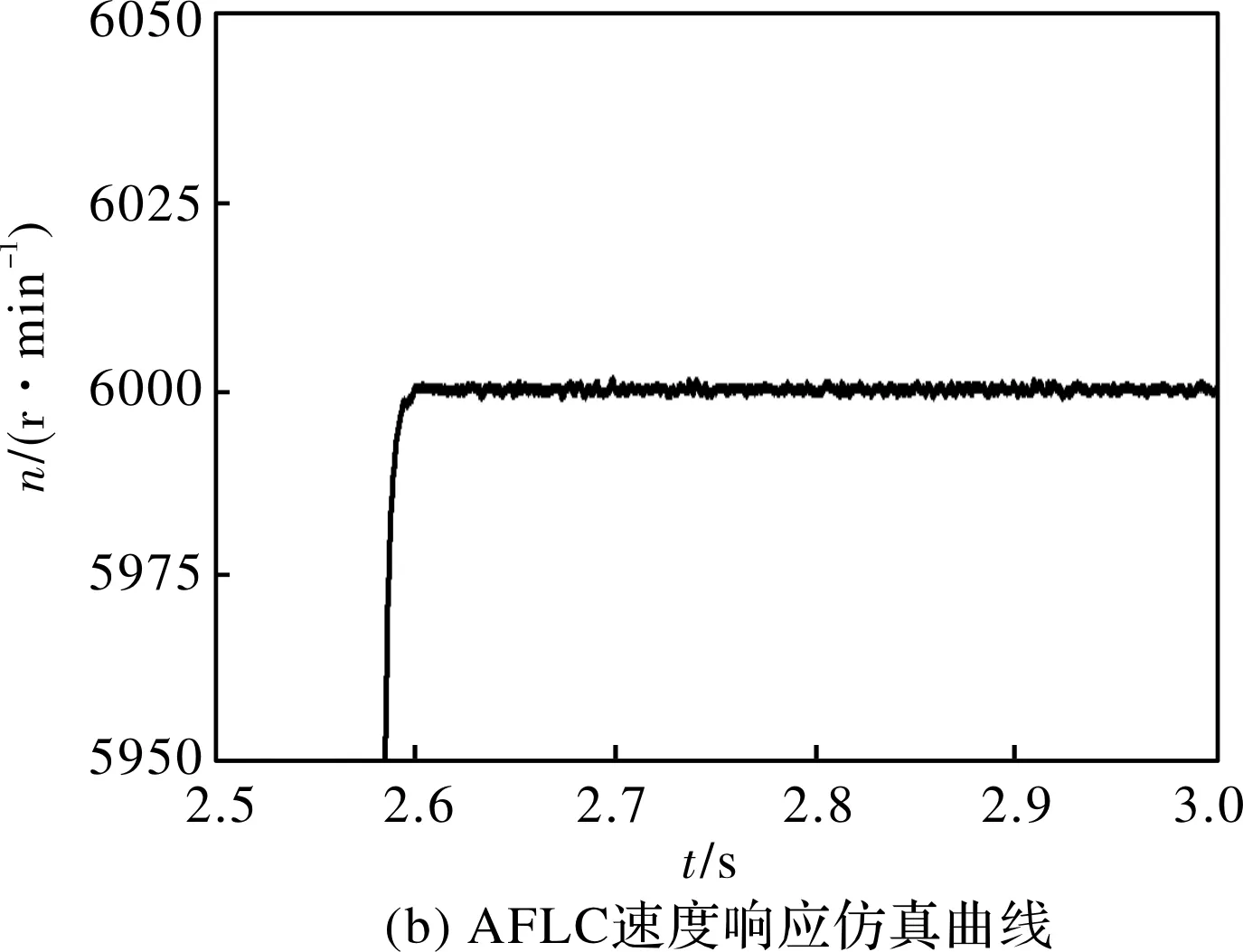
图8 FLC和AFLC速度响应仿真波形局部放大图(满载大惯量)
为方便比较,表2总结了两种工况下,两种控制器速度响应性能的仿真结果。根据表2,结合图5~图8可以看出,当系统转动惯量J发生变化后(即当系统内部参数发生变化时),常规FLC的速度动态响应性能变差,而AFLC具有更强的鲁棒性。
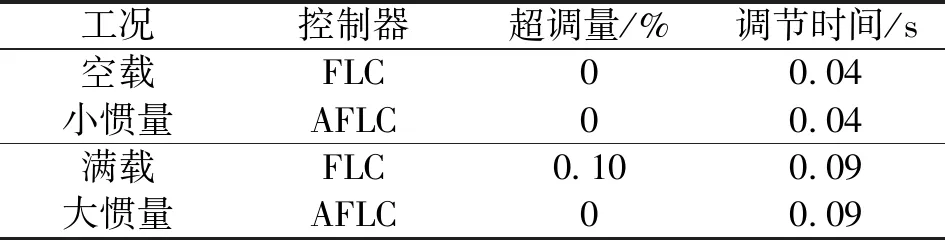
表2 不同工况下两种控制器的速度响应性能仿真结果
图9为系统转动惯量J=2.91×10-5kg·m2,TL=66 mNm(满载),给定转速nref=6000 r/min时,速度响应达到稳态后,AFLC输出比例因子仅一级调节环节动作与两级调节环节同时动作时,控制器输出的给定电流波形对比图。可以看出,加入二级调节环节可在系统转动惯量增大时,进一步降低模糊控制器输出电流中的谐波含量。
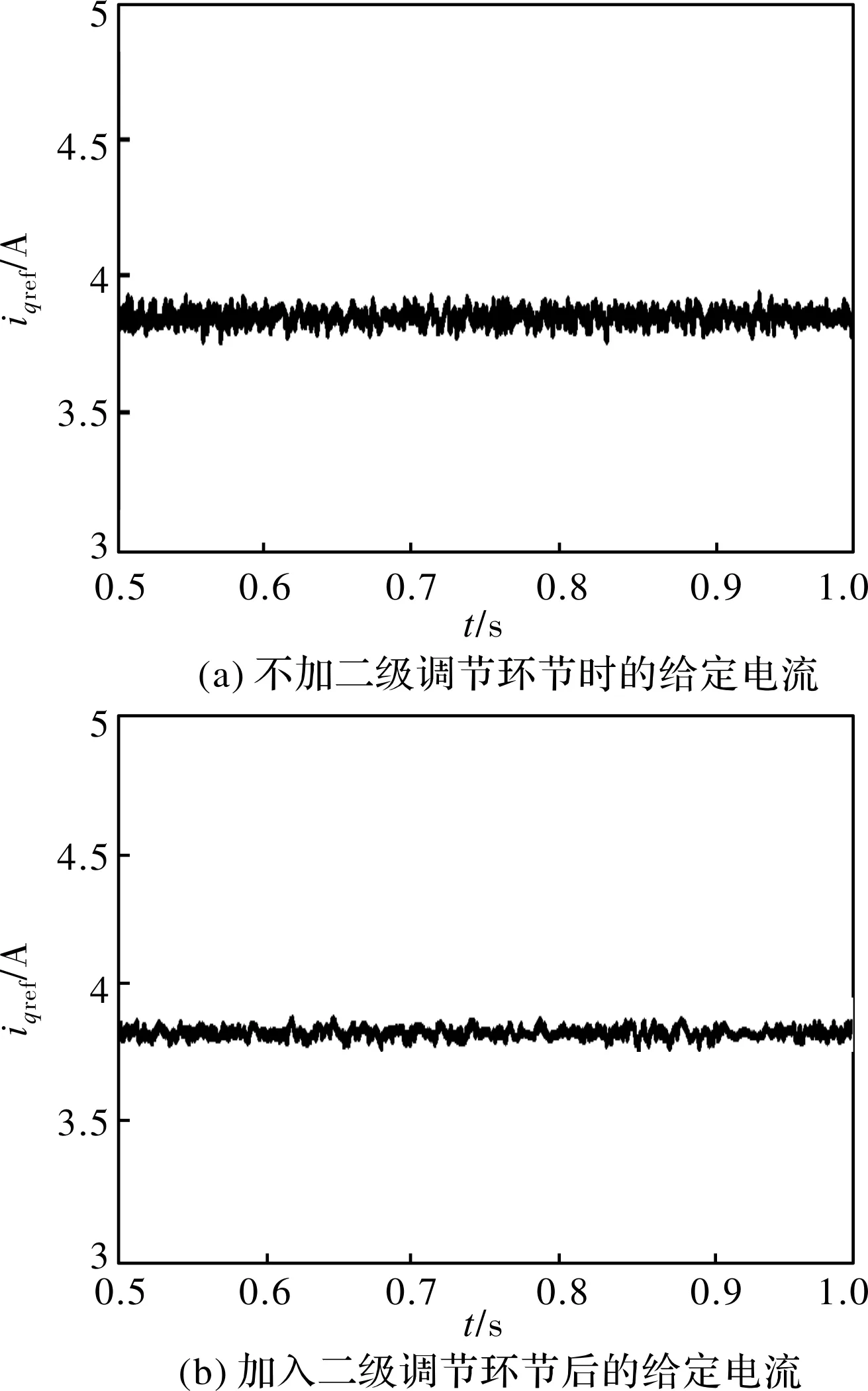
图9 加入二级调节环节前后速度环输出给定电流的仿真波形图
图10为系统惯量J=2.91×10-5kg·m2,TL在22 mNm与66 mNm之间变化,给定转速nref=6000 r/min时,两种控制方式的抗扰性能对比。
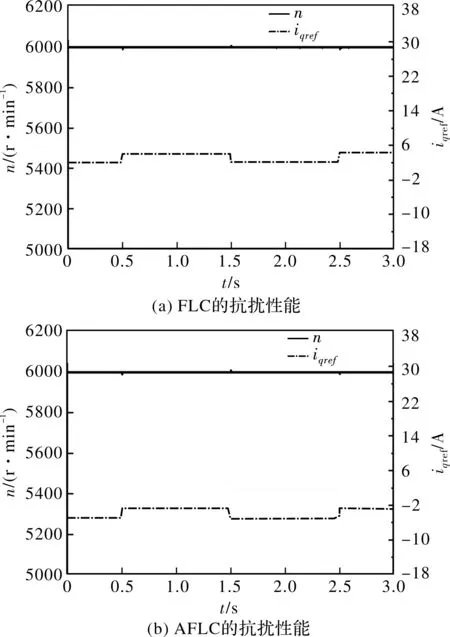
图10 两种控制器抗扰性能的仿真结果
为方便比较,表3总结了负载动态变化时,FLC和AFLC速度响应的动态降落和恢复时间。

表3 两种控制方式下的抗扰性能仿真结果
由仿真结果可知,由于AFLC的输出比例因子较小,电流控制较慢,所以恢复时间较FLC略长,但完全在可接受范围内。
3 实验验证
实验测试系统见连载之二,电机参数同表1。实验中通过改变两电机间联轴器的大小来改变系统转动惯量的大小,实际的总惯量分别为1.86×10-5kg·m2和2.91×10-5kg·m2(与仿真相同)。
图11为空载、小惯量,nref在1000 r/min与6000 r/min之间变化时,FLC、AFLC的速度响应以及输出给定电流的实验波形图。图12为图11中FLC和AFLC速度响应暂态过程的局部放大图。结合二图可知,AFLC较FLC而言,输出电流中的谐波含量更少,实验结果与仿真结果基本一致。
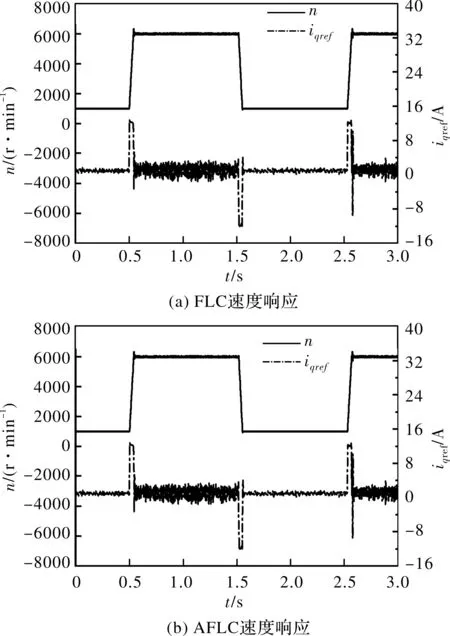
图11 两种控制器速度响应的实验结果(空载小惯量)
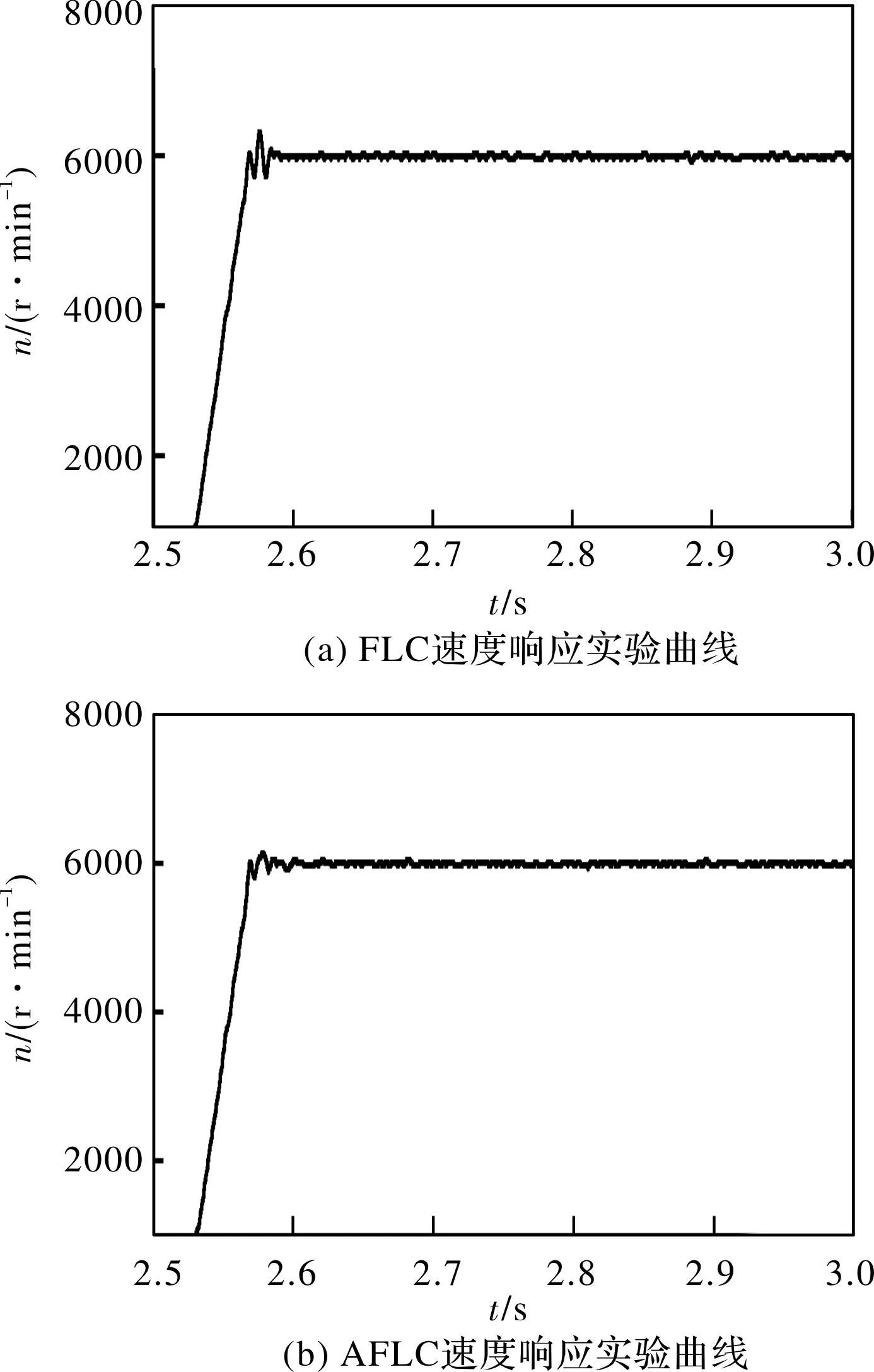
图12 FLC和AFLC速度响应实验波形局部放大图(空载小惯量)
图13为满载、大惯量,给定转速nref在1000 r/min与6000 r/min之间变化时,FLC、AFLC的速度响应以及输出给定电流的实验波形图,可以看出AFLC输出电流中的谐波含量明显小于FLC。图14为图13中FLC和AFLC速度响应暂态过程的局部放大图。可见,AFLC的速度响应更优。
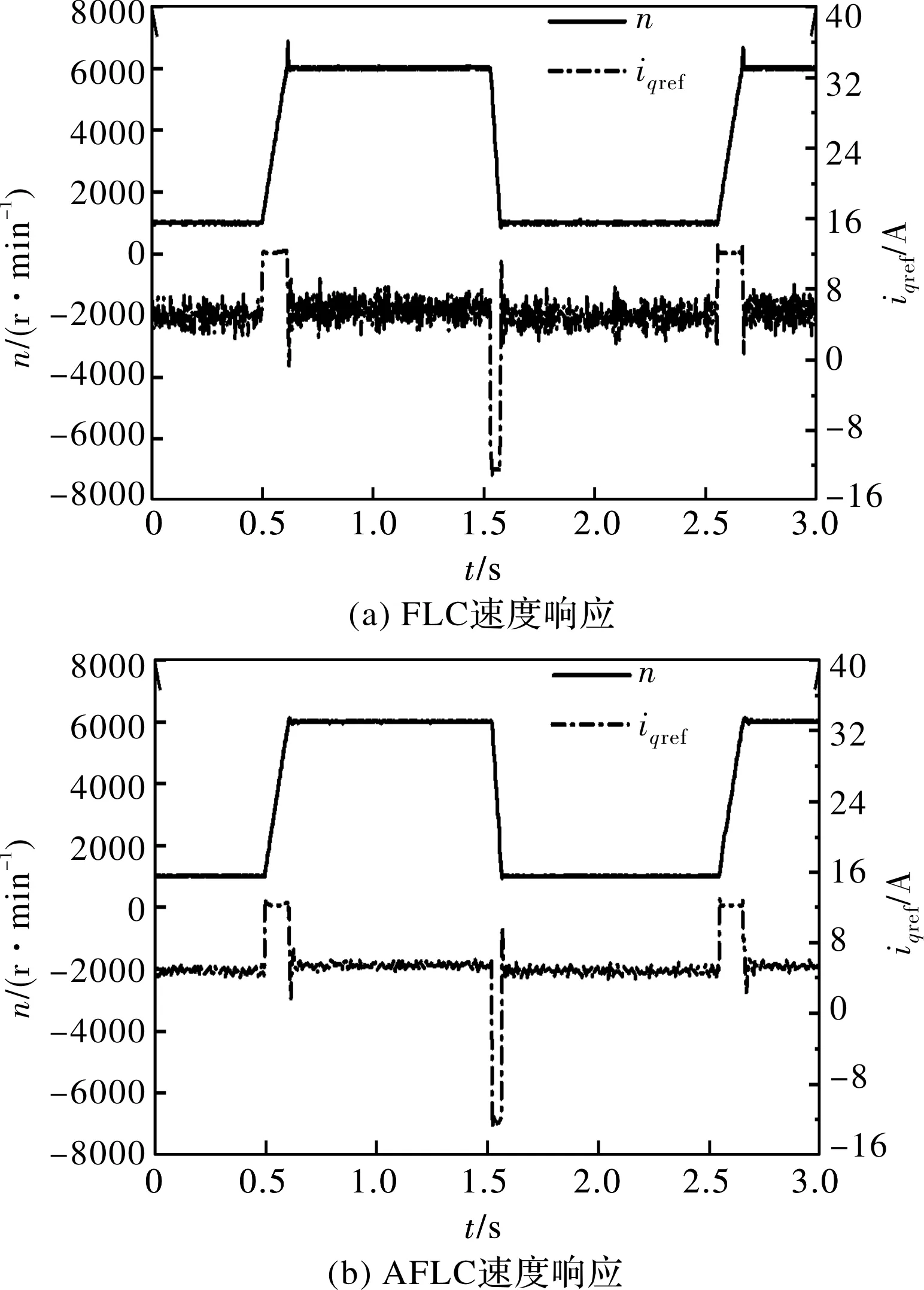
图13 两种控制器速度响应的实验结果(满载大惯量)
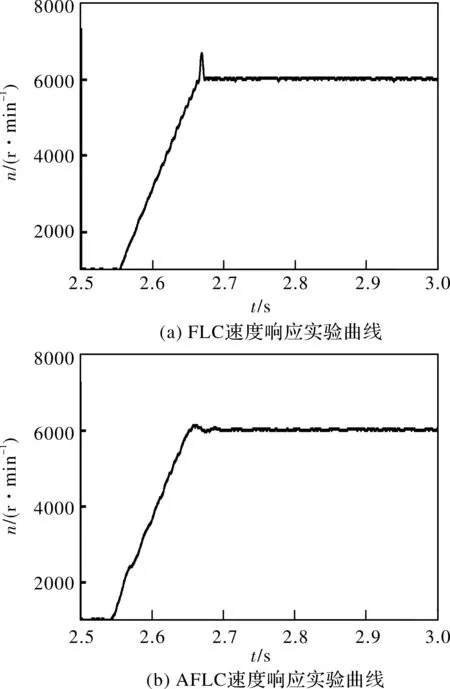
图14 FLC和AFLC速度响应实验波形局部放大图(满载大惯量)
为方便比较,表4总结了以上两种工况下,两种控制器的速度响应性能实验结果。根据该表,结合图13、图14可知,惯量增大后暂态过程中FLC的转速超调量显著增加,而AFLC的瞬态响应仍可保持较优的性能(超调小且响应快),因此,AFLC具有更强的鲁棒性,这与仿真结果一致。
相较于仿真结果,实验中惯量增大后,FLC的超调量增加得更为明显,这是因为实际实验中,受联轴器等外部因素的影响,摩擦转矩增加,|ecs|减小更为显著,距离理想数值区域更远,故超调量更大。
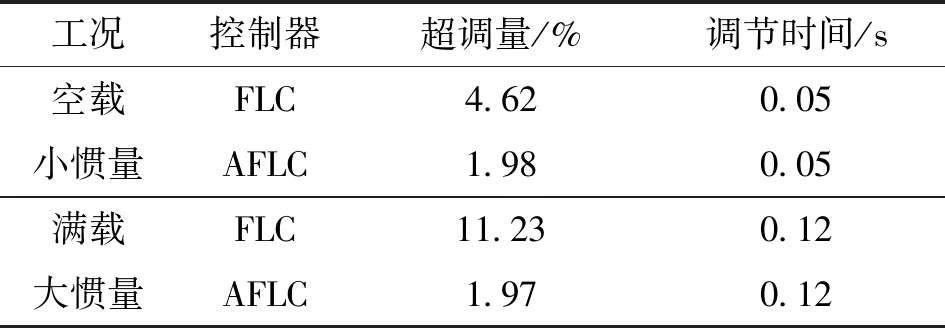
表4 不同工况下两种控制器的速度响应性能实验结果
图15为满载、大惯量,转速n=6000 r/min时,AFLC仅一级调节环节动作与两级调节环节同时动作时,速度环输出给定电流实验波形对比图。可以看出,加入二级调节环节可在系统惯量增大时,进一步降低AFLC输出电流中的谐波含量。

图15 加入二级调节环节前后速度环输出给定电流的实验波形图
图16为大惯量,TL在22 mNm与66 mNm之间变化,nref=6000 r/min时,两种控制器抗扰性能的实验结果对比。为方便比较,表6总结了实验中负载动态变化时,FLC、AFLC速度响应的动态降落和恢复时间。AFLC的响应略慢,但与FLC的差别极小。
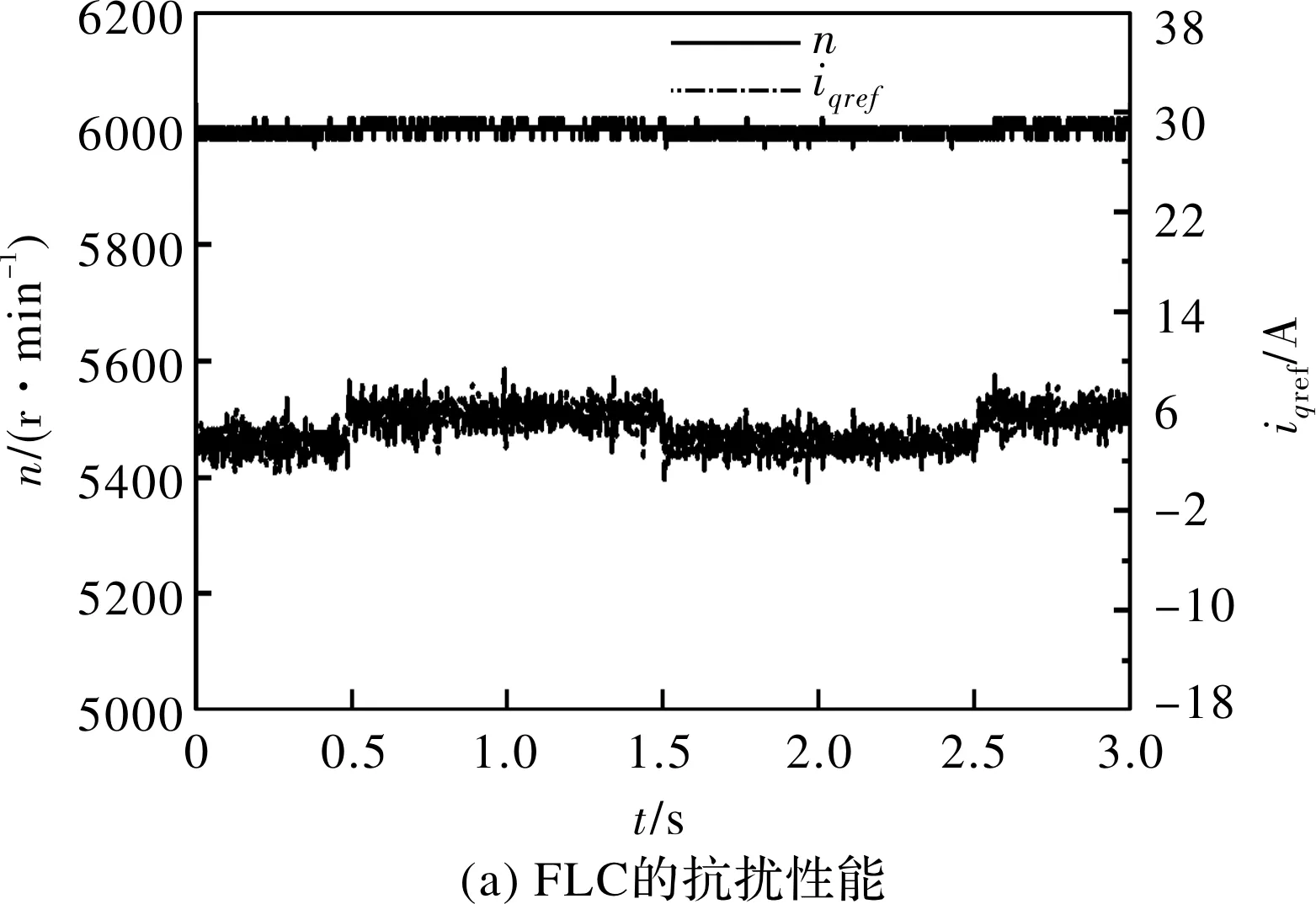
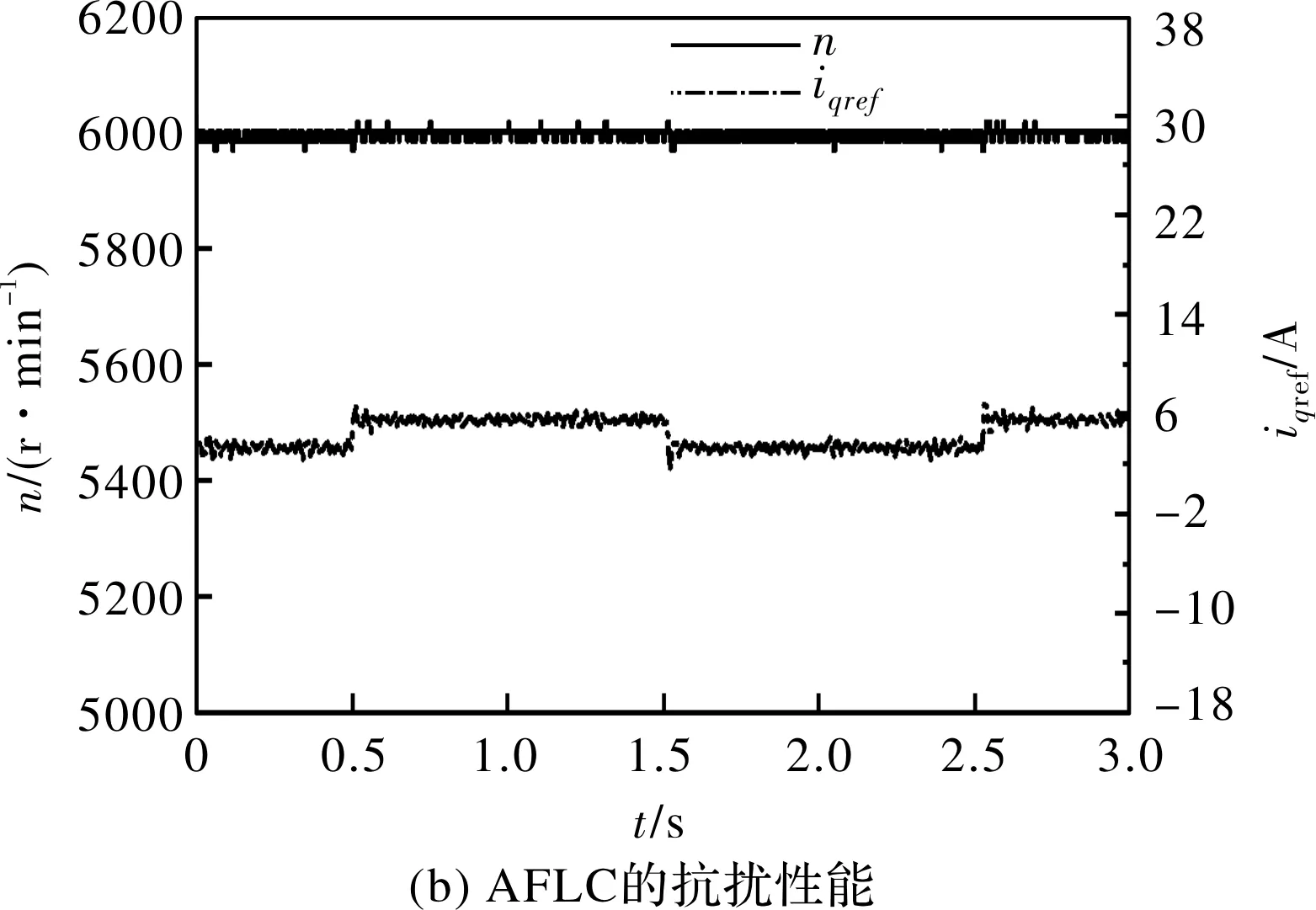
图16 两种控制器的抗扰性能实验结果
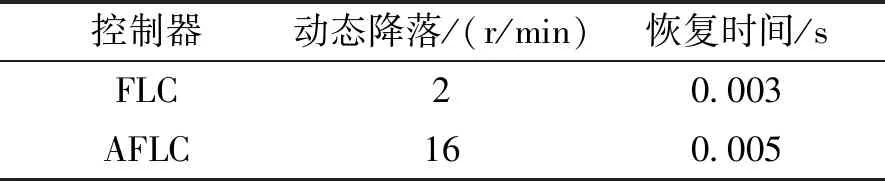
表5 两种控制方式下的抗扰性能实验结果
4 结 论
将模糊逻辑控制器(FLC)应用于速度伺服控制中,可加快动态响应,增强系统的抗扰性,但其输出电流中谐波含量高,且当系统转动惯量发生较大变化时,其速度的动态响应性能变差,鲁棒性有限。故本文提出自适应模糊逻辑控制(AFLC)方法,在保留传统FLC优点的基础上,通过实时动态调整AFLC输入变量ec对应的比例因子α,来保证α·ecs始终能够落到隶属度函数理想的数值区域中间,使得速度响应能够在系统内部参数发生摄动时不会出现过大的超调,有更强的鲁棒性;同时,通过调整AFLC的输出比例因子β及二级调节因子1/α,可降低速度控制器输出电流中的谐波含量。
仿真和实验结果均证明了AFLC较FLC而言,在系统惯量发生变化时具有更强的鲁棒性,且输出电流谐波含量更低。
猜你喜欢
电力系统保护与控制(2022年19期)2022-10-21
消费电子(2022年6期)2022-08-25
现代电力(2022年2期)2022-05-23
云南电力技术(2021年6期)2022-01-18
小学生学习指导(高年级)(2021年3期)2021-04-06
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
小学生学习指导(高年级)(2018年3期)2018-11-29
电子制作(2018年17期)2018-09-28