基于乐博士EV3机器人测量物体运动瞬时速率的实验设计与研究
2022-11-21 12:28周颖怡杨晓琳
无线互联科技 2022年18期
周颖怡,杨晓琳
(岭南师范学院,广东 湛江 524048)
0 引言
物理实验教学中,利用实验器材测量物体的瞬时速度是一项重要的物理实验,通常测量的是物体的平均速度,但难以具体描述物体移动瞬间的变化情况,可以通过测量瞬时速度了解物体瞬时的变化情况。笔者在对测量物体运动速度的瞬时实验分析时发现,实验过程中的实验步骤和数据繁多。因此,尝试利用乐博士EV3机器人测量物体运动瞬时速率,以探究实验过程的可行性;并对比传统实验,分析使用乐博士EV3机器人进行实验的优缺点。
1 测量物体运动瞬时速率的研究现状
运动瞬时速度可以作以下理解,根据公式理解,物体运动的时间点的间隔△t截取得越来越小时,该单位时间范围内的瞬时平均直线速度会越来越趋向某一个固定数值,当△t越趋向于0,原来的匀变速直线运动可看作是匀速直线运动现象来分析,因此该时间段的速度也被看作是物体在该点的瞬时速度。通常把瞬时速度看作是静止物体在连续运动后达到某一点(位置)的速度,瞬时速度的大小可称作瞬时速率[1]。匀速运动或直线加速运动通常作为实验研究对象。从物理含义上看,瞬时速度指某一时刻附近极短时间内的平均速度。瞬时速率没有方向,只有大小之分,是物理学中的标量概念。
国内外物理实验中,实验室测量物体运动瞬时速率的方法主要有3种:方法一,使用打点计时器测量物体瞬时速度;方法二,使用光电门和气垫导轨测量物体瞬时速度;方法三,使用阿托武德机测量瞬时速度[2]。
近几年,不少学者尝试对该系列实验方式进行创新和改进[3]。在此,笔者基于传统物理实验测量瞬时速度的方法,探究应用乐博士EV3进行该物理实验的可行性。
2 乐博士EV3机器人
乐博士EV3机器人是第三代MINDSTORMS机器人,配有EV3智能主机、各类传感器、电动马达、积木零件(齿轮、轮轴、横梁、插销)等。使用者可根据个人需求利用EV3机器人,搭建不同的机器人,通过编写程序使机器人按指令执行任务[4]。与其配套使用的软件为EST,是一款以图形方式编写的教学机器人程序[5],使用者可以从程式设计工具条中选取一种特殊的模组,将模组拖至程式设计模组的程式设计区。程序设计中有序列和数据传送的关系,序列关系限制了模块的功能执行次序,数据的传递关系则限制了程序逻辑中的数据流向,而编程区可以表达两者之间的关系。
3 实验设计与研究
乐博士EV3套件有配套的软、硬件及众多传感器,可以借此进行数字化实验设计,验证或改进学科实验,了解实验在科学研究中的作用[6]。传统的实验教学方法是利用打点计时器或光电门气垫导轨测量物体运动瞬时速率。为探究EV3能否优化传统物理测量实验,改善传统物理实验的不足,进行同时双轨制实验,一边利用量尺测量小车长度并用秒表测量小车通过时间,一边利用乐博士EV3机器人开展以下实验,进而达到验证利用乐博士EV3机器人进行实验的准确性。
实验目的:利用乐博士EV3机器人测量物体运动瞬时速率,探究实验数据的准确性,分析EV3机器人在物理实验中的可行性。

实验器材:乐博士EV3机器人套件和计算机。
实验装置:测量物体运动瞬时速率的实验装置如图1所示。

图1 EV3测量物体运动瞬时速率实验装置
实验过程:
(1)用量尺测量小车车身长度。
(2)依次先后打开乐博士EV3测速仪程序块(见图1右侧装置)及小车程序块(见图1左侧装置),开启测速仪程序。
(3)打开乐博士EV3,开启小车直行程序。
(4)测速仪检测到小车出现及检测到小车离开,都会发出不同的声音进行通知,用秒表测量小车经过的完整时间并记录下来;程序块内通过预先设定的程序计算小车的瞬时速率并显示在测速仪程序块屏幕上,及时记录数据。
(5)重复进行多次实验,取平均值。
4 实验设备总体设计
乐博士EV3小车由EV3程序块、大型电机、光滑角梁、插销、轮轴、小车轮毂、小车轮胎等拼装而成。
乐博士EV3测速仪主要由超声波传感器和EV3程序块组成,超声波传感器辅助测距和识别障碍[7]。
将超声波传感器固定在基板上,并达到一定高度,EV3程序块固定在基板中;利用连接线将超声波传感器与EV3程序块连接。
软件方面,利用EST软件对EV3机器人模块进行编程、调试,从而实现EV3机器人测量物体运动瞬时速率的实验。
小车程序(如图2所示):当程序启动时,电机运行,小车以功率10 W和50 W直线运动,运转时间设为3 s,目的是令小车整个车身顺利通过测速仪。

图2 小车运行程序
测速仪程序(如图3所示):程序启动时清除屏幕显示的内容,方便后续实验显示数据。实验开始时,测速仪发出声音,提醒实验者实验已开始,测速仪开始记录时间,当小车整体车身通过超声波传感器时,测速仪再一次发出声音,提醒实验者实验结束,停止记录时间。程序后续部分,是利用数学公式将测速仪记录小车通过超声波传感器的时间作为除数,车身长度为被除数,用公式计算得出小车通过测速仪的瞬时速率,并将速率显示在测速仪显示屏上,方便实验者读数并记录。

图3 测速仪运行程序
通过乐博士EV3机器人的设计与编程,实现了乐博士EV3机器人测量物体运动瞬时速率的实验,测量过程可显示小车车身通过超声波传感器的时间,并通过车身除以超声波传感器记录的时间,得出小车运动的瞬时速率。
5 实验数据
如表1、表2所示,对比两组数据发现,EV3机器人测量的数据与物理学测量的数据误差较小,误差在0.1以内,实验数据较为准确。
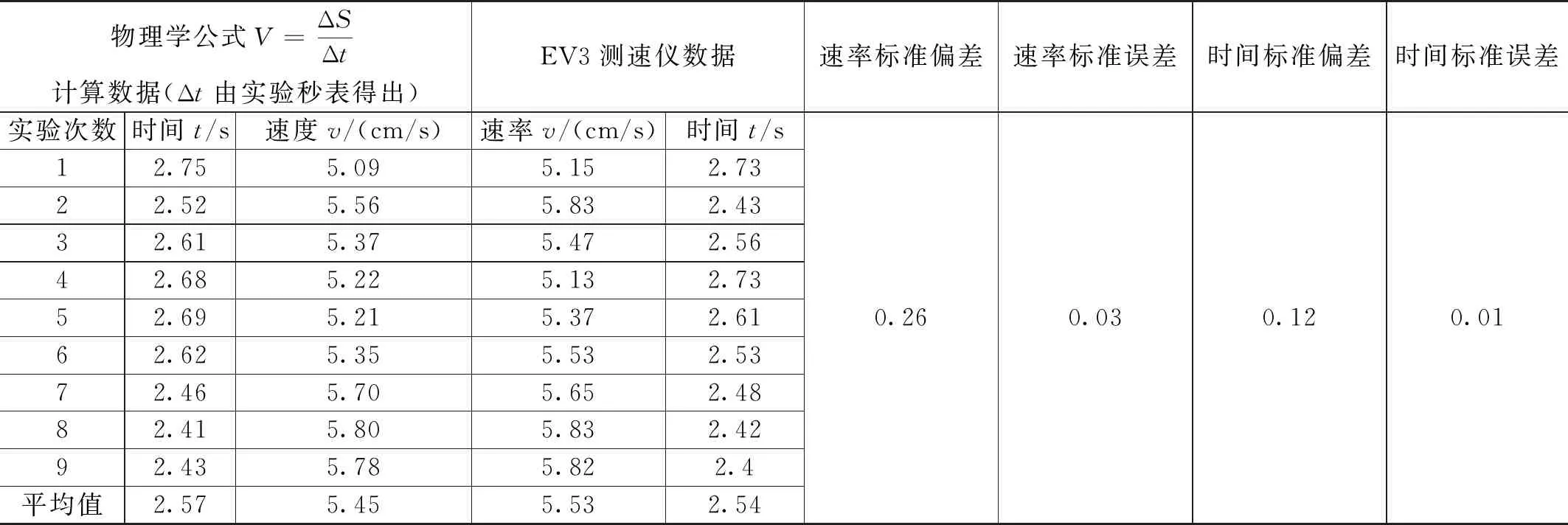
表1 实验一:测量物体运动瞬时速率实验数据(功率10 W,小车车身14 cm)

表2 实验二:测量物体运动瞬时速率实验数据(功率50 W,小车车身14 cm)
实验中,小车启动时的摆放角度、超声波传感器的灵敏度以及小车的动力情况都会影响实验的结果,从而造成实验误差。小车启动时摆放的角度会影响小车前行的路线,当小车行驶的路线出现偏差时,超声波传感器测量的距离会小于小车的车身长度14 cm,从而导致超声波传感器测量的时间有误差。
6 结语
本文讨论的测速仪拼装简单有效,方便自行设计与拼装,实验得以有效简化。测速仪的软件程序容易理解,通过简单的讲解可以有效理解程序的具体含义,并进行编程设计。
利用乐博士EV3及超声波传感器进行物体运动瞬时速率测量,是测量物体运动速度的新实验方法,丰富了测量物体运动速率实验的形式。本次实验也是教育机器人应用于物理实验教学的创新方法,为数字化实验提供了思路。
猜你喜欢
小哥白尼(神奇星球)(2020年7期)2021-01-18
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
商品与质量(2019年51期)2019-11-28
娃娃乐园·综合智能(2019年7期)2019-08-26
电子制作(2018年8期)2018-06-26
小学生导刊(低年级)(2016年8期)2016-09-24
科学之友(2014年24期)2014-03-20
机械与电子(2014年2期)2014-02-28
中学理科·综合版(2008年6期)2008-08-07