
BP优化PI与无源控制的并网逆变器复合控制
2022-11-23 11:35徐倩张巧杰王久和
北京信息科技大学学报(自然科学版) 2022年5期
徐倩,张巧杰,王久和
(北京信息科技大学 自动化学院,北京 100192)
0 引言
在拓扑结构一定的情况下,并网逆变器的性能取决于控制策略[1]。传统控制方式为电压电流比例积分(proportional integral,PI)双闭环控制,外环PI控制器控制电容两端电压,其输出为电流内环PI的输入,同时内环PI实现电流解耦控制。但PI参数难以整定,无法实现真正的电流解耦。此外PI控制器需要建立精确的系统模型,当外界发生扰动时更是难以达到逆变器并网要求。因此,研究者们不断探索控制逆变器的新型策略从而提高逆变系统的性能。文献[2-3]采用无差拍控制内环,实现了并网电流快速跟踪,但需要建立精确的系统模型。文献[4]针对系统动态响应缓慢,提出PI+重复控制的复合策略对系统进行控制,但重复控制器本身动态较差,因此文献[5]又加入了模糊控制,对PI控制器进行优化从而提高其响应速度。文献[6-7]使用滑模控制器对逆变器进行控制,提高了并网电流控制精度,加强了鲁棒性,此控制虽提高了稳定性,但其控制器结构复杂。
无源控制(passivity-based control,PBC)具有良好的鲁棒性与动态性能,无源理论已成功应用到各种电力电子变换中。文献[8-9]采用PBC对光伏并网逆变器进行解耦控制,加强了系统的鲁棒性。为提高系统输出稳定性,文献[10-12]将PBC分别应用到Boost变换器、Cuk变换器中。文献[13-14]分别将PBC与PI控制、滑模控制相结合,提高了变换器输出电流控制精度。
神经网络作为智能控制中的一种,不需要建立精确的模型且具有较强的抗干扰性,可描述复杂的非线性系统,因此被广泛应用到各个领域。文献[15-16]采用反向传播(back propogation,BP)神经网络算法对并网逆变器电流环进行控制,较好地完成了并网电流跟踪,提高了系统动态响应。文献[17]采用BP-比例积分微分(proportional integral differential,PID)控制Boost变换器,降低了输出电压的过调,提高了系统的稳定性。文献[18]采用基于模糊神经网络的PI双闭环控制,对PI控制器进行优化从而提高其响应速度,电压外环采用模糊神经网络控制,来补偿电流内环精度,使得输出电流波形稳定。
为降低并网电流谐波,本文采用PBC对电流进行控制,由于PBC不能精确趋于稳定点,引入BP神经网络对PI外环进行优化设计,来补偿电流内环精度以加快电流内环的响应。该控制策略可消除并网电流稳态误差,快速跟踪电网电压,且电流谐波含量即总谐波失真(total harmonic distortion,THD)达到并网要求。仿真验证了该策略具有很好的控制效果。
1 并网逆变器拓扑结构
三相并网逆变器的拓扑结构如图1所示。L1为电感器电感,VT为开关管,VD为二极管,C为电容器的电容,L为滤波电感器的电感,R为滤波器阻抗和线路阻抗,ia、ib和ic代表逆变器并网电流,uea、ueb和uec为电网交流电压,udc为直流母线电压,iin为直流侧输入电流。

图1 三相并网拓扑结构
设该电路工作在平衡状态下,且电感为线性,开关无损耗,电容无损,该逆变器经矩阵变换转换到dq坐标系下的数学模型为
(1)
式中:Sd、Sq为开关函数在d、q轴上的分量;id、iq为逆变器并网电流在d、q轴上的分量;ued、ueq为电网交流电压在d、q轴上的分量;ω为两相旋转角频率。
2 复合控制器设计
2.1 PBC控制器设计
将式(1)写成表达式语言(expression language,EL)的形式:

(2)
式中:M、J、分别为正定的对角阵、反对称矩阵、对称正定矩阵。即

如果存在一个正定函数Q(x)以及半正定且连续可微的存储能量函数H(x),可以得到耗散不等式:
H(x)≤uTy-Q(x)
(3)
式中,uTy为能量供给率。
设该系统能量函数为
(4)
则有

由于J=-JT,因此储存函数xTJx=0,结合式(3),说明该系统是无源的。
设系统的误差存储函数为
(6)
定义参考状态变量为
为加快收敛速度,需注入阻尼,设阻尼耗散项:
式中:
由式(2)可知:

(7)
令

(8)
则使式(7)右边为0,即

(9)
那么可使
(10)
根据式(8)可得开关函数为
(11)
将式(11)代入式(1)可得
(12)
将式(7)改写为

(13)
选择控制律:

(14)

(15)
2.2 BP优化PI控制器设计
选择合适的阻尼,电流id会很快收敛到期望值。由于PBC不能使电流id精确趋于期望值,会降低微电网并网时的入网电流质量。本文设计了BP神经网络优化的PI控制器为电压外环来补偿电流精度,以此加快内环的响应速度消除稳态误差。设i、j、l分别为输入层、隐含层以及输出层神经元个数。BP神经网络输入层为实际电压udc、参考电压udcr以及两者的误差e,输出为PI控制器的比例系数kp、积分系数ki。三层BP神经网络结构如图2所示。
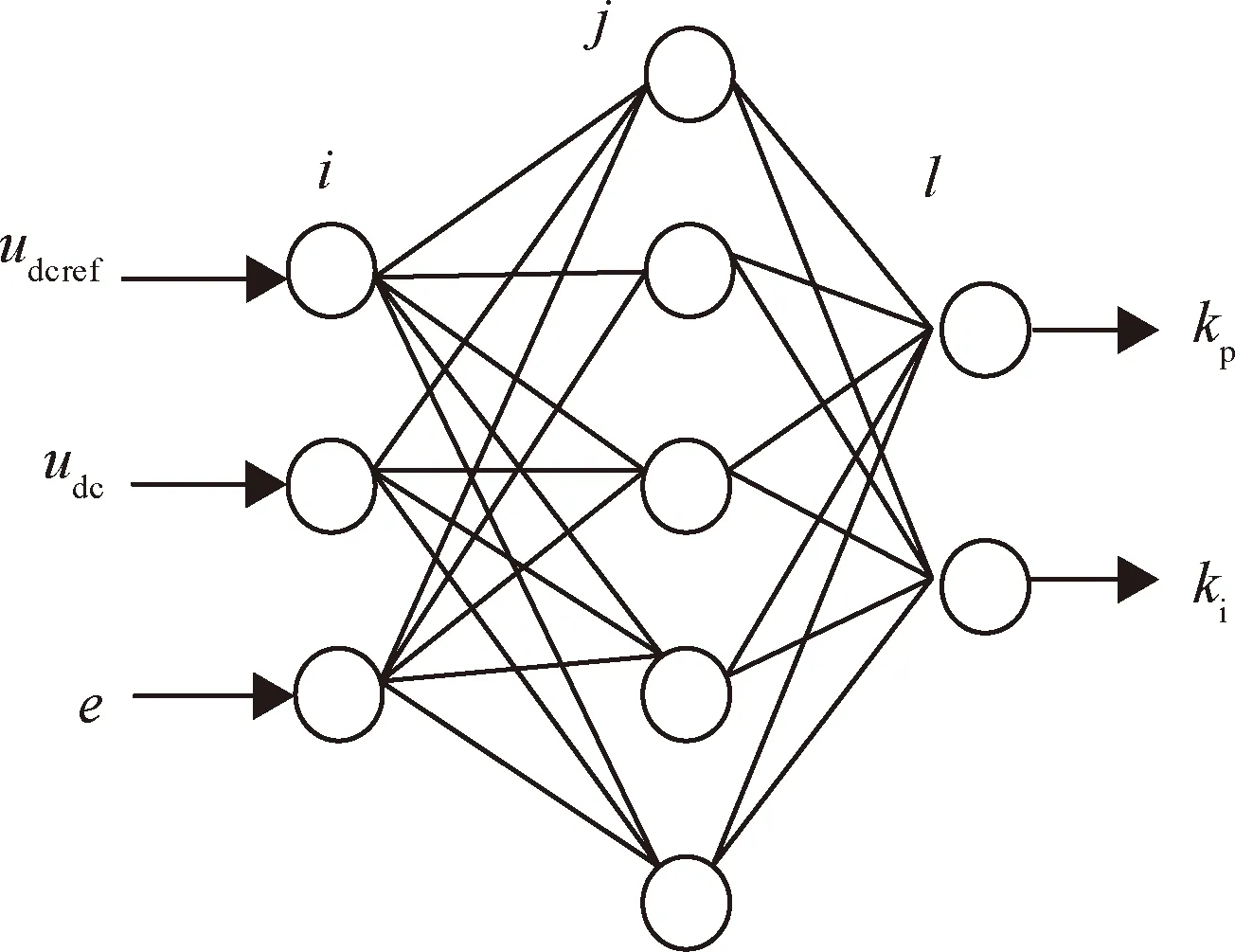
图2 BP神经网络结构
设补偿的电流值为Δidref,则BP神经网络优化的PI控制器为
u(k)=u(k-1)+kp(e(k)-
e(k-1))+kie(k)
(16)
式中的u(k)为控制量Δidref。
原内环PBC的电流得到补偿后为
隐含层的输入输出为
(17)

隐含层的激励函数:
(18)
输出层输入、输出函数为
(19)

kp、ki为非负,输出层激励函数选取:
(20)
输出层的输出为PI的两个参数:
(21)
均方误差函数定义为
(22)
采用最速下降法沿负梯度方向对加权系数进行调整,使得E(k)最小时能够得到权值矩阵最优值,输出层的梯度式为:
(23)
其中:
(24)
(25)
由式(16)、(21)可得
(26)
则:
(27)
由式(19)可得:
(28)
(29)
则式(23)可写成:
(30)
其中

(31)
权值变化量与误差函数成正比,为加快误差函数收敛,加入惯性项,则输出层权值更新算法为:
(32)
式中:η为学习率;α为惯性系数。
同理,隐含层权值更新算法为
(33)
其中:
3 实验结果与分析
本文所提BP优化PI+PBC策略的系统结构如图3所示,在Matlab/Simulink中分别采用传统PI双闭环控制以及本文策略对该系统进行仿真,分析比较这两种控制策略的电流谐波。选取BP神经网络算法的学习率为η=0.25,惯性系数α=0.05,采样周期为0.001 s。该变换器的主要参数如表1所示。

图3 系统控制框图

表1 变换器参数
注入不同大小的阻尼Ra会对系统的动态响应产生不同的影响,对于不同的阻尼参数,逆变器输出的d轴的电流波形如图4所示。可以看出Ra>20 Ω以后的波形与Ra=20 Ω基本接近,说明系统的动态响应基本不会再发生变化,因此本文最终选取阻尼参数为20对系统进行仿真。

图4 不同Ra时系统动态响应比较
为验证系统的稳态性能,对本文控制算法进行仿真。该控制算法下的d轴电流跟踪误差以及a相并网电流、电网电压波形如图5、6所示。可以看出该控制策略下的电流跟踪误差能迅速趋于零,实现并网电流与电网电压同相,且能稳定跟踪期望值,说明在BP优化PI+PBC策略下,电流能够实现无差跟踪,具有良好的稳态性能。

图5 电流跟踪误差

图6 a相并网电流、电网电压
为验证所提控制策略的动态性能,在0.3 s时模拟负载发生跳变,采用BP优化的PI+PBC进行仿真,其三相电流如图7所示。从图中可以看出该控制策略下的电流跟踪过程快速平稳,具有良好的动态性能。

图7 BP优化PI(PBC下的三相电流
采用PI控制以及本文策略下的a相并网电流频谱分别如图8、9所示。入网电流基波幅值分别为13.68A、27.43A,两种控制策略的THD分别为3.79%、1.79%,相较于PI控制,本文BP优化PI+PBC控制策略可有效降低并网电流的谐波,提高入网电流质量。

图8 PI双闭环控制下的并网电流谐波

图9 BP优化PI+PBC下的并网电流谐波
4 结束语
本文对三相并网逆变系统,采用阻尼注入的方式建立了基于EL模型的电流内环PBC策略,为解决PBC不能精确趋于稳定点的问题,引入具有惯性项的BP算法优化的PI外环控制器来补偿电流内环精度。其仿真实验结果表明:本文复合控制策略可可消除并网电流稳态误差,实现并网电流无差跟踪,相较于传统PI控制,可有效抑制并网电流谐波,具有良好的控制效果。
猜你喜欢
广东医科大学学报(2020年6期)2020-02-06
山东冶金(2019年3期)2019-07-10
电子制作(2018年18期)2018-11-14
中国微创外科杂志(2018年9期)2018-10-09
通信电源技术(2018年5期)2018-08-23
消费导刊(2018年10期)2018-08-20
电力系统及其自动化学报(2016年5期)2016-12-01
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01
电气化铁道(2016年6期)2016-05-17
