
受限通信范围下海上目标的多无人机协同搜索算法*
2022-12-10 06:55王可铮周兴莲林梦婷
传感器与微系统 2022年12期
王可铮,周兴莲,林梦婷,李 彬
(1.联想集团 方案服务业务集团,四川 成都 610041;2.四川大学 空天科学与工程学院,四川 成都 610000)
0 引 言
多无人机(unmanned aerial vehicles,UAV)协同执行任务能够提升战斗力,在多领域都得到了广泛应用,如协同搜索、探测等[1,2]。协同搜索的关键问题1是如何对不确定的环境进行建模,最常用的方法是基于搜索图的方法,例如基于环境不确定性的认知图[3,4]、信息素图[5]、概率图等[6];关键问题2是如何依据当前对环境和目标的认知做出协同搜索决策,最典型的区域搜索方法有滚动优化算法[7]。
文献[8]采用分散式结构,根据实时通信状态构建不同的小组和环境认知地图,小组内采用集中式算法进行决策。文献[9]考虑通信距离限制情况,建立了UAV通信拓扑结构,超过通信范围且无法间接通信段UAV之间不能协同。文献[10]针对UAV群部分链路不可达问题,根据实时通信状态,建立了局部互通网络,当某一UAV无法与其他UAV进行通信时,将采用单机飞行控制,不再参与协同。
本文以特殊环境下通信受限时海上目标搜索为研究背景,开展基于分布式模型预测控制(distributed model predictive control,DMPC)协同搜索问题研究,旨在生成一条最优的搜索路径。
1 问题描述
1.1 搜索区域环境建模
将海面任务搜索区域Ξ视为平面,并进行如图1(a)所示的栅格化。采用概率图表征目标存在的概率情况。定义在网格c内,目标存在的概率为pc(k)∈[0,1],pc(0)为先验信息。如图1(b)所示,如果先验已知某个方格里面存在目标的概率比较大时,会将该方格及周围方格的初始存在概率pc(0)设置为逐渐递减形式,随着UAV搜索任务的进行,pc(k)实时变化,为UAV的决策提供实时的环境信息。引入γc,k∈[0,1]变量描述UAVi对网格c的不确定度
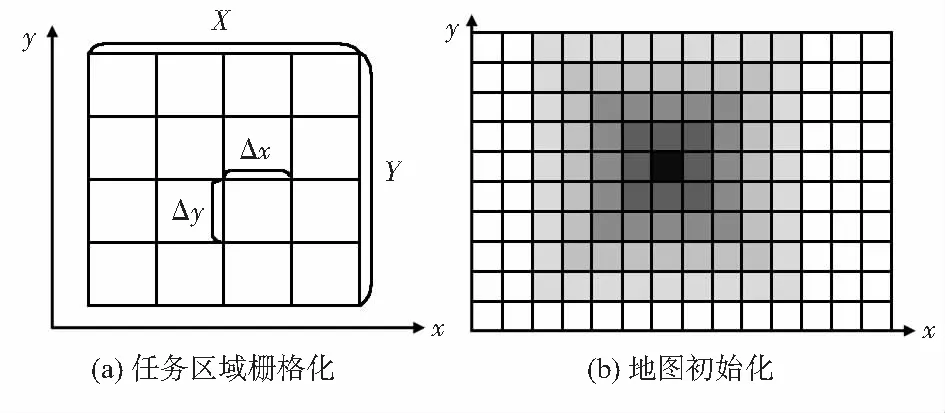
图1 搜索区域环境建模
(1)
其中,Kγ>0,|•|为取绝对值。
1.2 UAV模型
假定任务派出n架UAV从指定机场出发对目标区域Ξ展开搜索,在栅格图模型中假设UAV是以一定速度飞行的质点。规定每个单元格最多存在一个目标。在栅格环境中规定UAVi只有8种航向状态,即,D={0,1,2,3,4,5,6,7},具体如图2所示。由于UAV存在最小转弯半径的物理约束,因此,UAVi在t时刻的某种飞行方向下,下一步的飞行方向只有3种可选,直飞或者左右45°转弯。
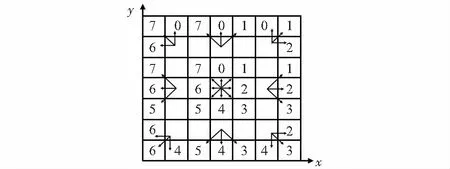
图2 航向示意
定义状态变量xi(k)=[δi(k),θi(k)],其中δi(k)=(xi(k),yi(k))=(n,m)为k时刻UAVi在栅格地图上的位置索引,θi(k)为k时刻UAVi的航向角。UAVi的运动模型如下
(2)
其中,ln[*]为取整函数,搜索过程中UAV以v0保持匀速飞行。
2 受限通信范围下的地图更新策略
2.1 通信拓扑建模
定义表征集群内部通信状态的邻接矩阵F(k)
(3)
式中N为UAV的数量,fij=1为UAVi与UAVj之间能够通信,fij=0为UAVi与UAVj之间超出通信范围无法实现通信。令
2.2 搜索地图更新策略
本文考虑真实的雷达模型如图3所示。O点为UAV所在位置,飞行高度为h,W为UAV在海面上的投影,在方位面的的覆盖角度为2φ,垂直俯仰覆盖角度为α1~α2,盲区半径为r=h×tanα1。UAV搭载的雷达的搜索范围在地面的投影则为ABCD围成的扇形。这样就将三维视场搜索问题转换为二维平面内的覆盖问题,只要海上目标出现在图中的阴影部分,则视为可以搜索到目标。
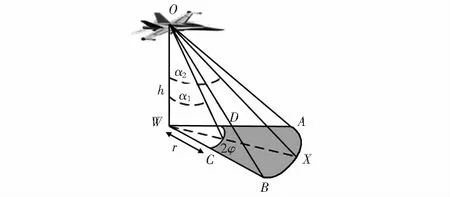
图3 雷达搜索模型
定义τ=1为事件“网格c中存在目标”,τ=0为事件“网格c中不存在目标”,Ωi,c,k=1为在k时刻UAVi搜索到网格c中存在目标,将目标存在概率地图的更新写为线性更新公式,定义一个新的变量
(4)
因此,概率地图线性更新公式为
Πc,k=Πc,k-1+λc,k
(5)
其中
(6)
式中pd,pf分别为传感器的虚警概率和检测概率,这2个指标描述了传感器的性能。
3 基于分布式模型预测控制的协同搜索算法
3.1 搜索问题建模
分布式模型预测控制方法需要考虑相邻智能体之间的信息交互,以实现UAV之间的协同。因此,UAVi决策搜索轨迹时,需要考虑相邻UAVj的状态信息序列以及控制量序列。
3.1.1 搜索性能指标
1)环境搜索收益

(7)
其中,Φl(c)为UAVi在网格c处,传感器的探测靶面。
2)任务执行代价
(8)
V(i,l,k)=Vs(i,l,k)-VD(i,l,k)
(9)
3.1.2 约 束
1)机间协同约束:为避免UAV集群发生碰撞,需要考虑UAV之间的安全约束
dij≥dmin
(10)

2)转弯半径约束:由于UAV存在转弯半径物理约束,每个时刻UAV的航向只能选择直飞或者左右45°转弯
θi(k)∈{-45°,0,45°}
(11)
3.2 基于模型预测控制的分布式算法
考虑UAV间的相互通信,将集中式优化决策问题分解为各个子系统的局部优化问题,进行分布式求解,分布式模型预测控制包括预测、滚动优化和执行3个关键步骤[11]。
3.2.1 预 测

3.2.2 滚动优化
分布式决策过程中每架UAV的优化目标只需要关注自身的搜索收益和航路代价,因此在分布式框架下,优化问题可构造为

s.t.xi(k+q+1|k)=fi(xi(k+q|k),ui(k+q|k)),
xi(k+q|k)∈Ξ,θi(k+q|k)∈Θ,
dij≥dmin,q=1,2,…,T;i=1,2,…,N
(12)
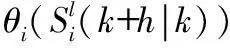
由于耦合约束和耦合目标函数的存在,导致上述优化问题难以求解。因此,本文采用冻结策略[12]将上述问题进行解耦。即每个采样时刻都只有一架UAV会求解优化问题(式(12)),更新控制序列,其他UAV将利用最新求解的控制序列进行控制。具体而言,在UAVi进行优化更新时,其他UAV的状态及控制量采用上一更新时刻的预测序列,因此当前优化问题只包含与子系统i有关的优化变量。“冻结”策略原理示意如图4所示。
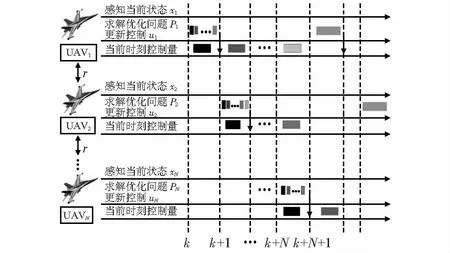
图4 冻结策略下系统更新示意
其中,r=[x(k),x(k+1|k),…,x(k+T|k),…,u(k+T|k)],UAV将自身预测的状态量以及控制量序列传输给邻域内的UAV。当fij(k)=0时,UAVi采取上一时刻获取到的最新邻居信息对下一时刻UAVj的状态进行预测。
3.2.3 执 行
在以冻结策略进行的滚动优化机制基础之上,每架UAV会执行上一个最新的控制序列中对应时刻的控制量。
4 仿真结果
矩形格子大小设置为200 m×200 m,搜索任务区域为100×100个网格,面向速度为30节的海上动态目标,使用5架UAV执行搜索任务。传感器的虚警概率pf为0.3,检测概率pd为0.9,探测范围为1.2 km,盲区半径为400 m。敌方目标t1和t2的初始位置分别为[10,50]和[55,70],考虑低动态目标,目标做匀速运动。设置UAV搜索到2个目标后就停止搜索。在目标周围存在区域,半径为:考虑2个半径为1 km的区域,及参数Kγ设置为1。UAV初始时刻在地图边缘呈一字队形。图5(a)为初始化地图,其中,★代表目标初始位置,底部扇形为雷达探测器的探测靶面,灰色阴影部分为威胁区域。
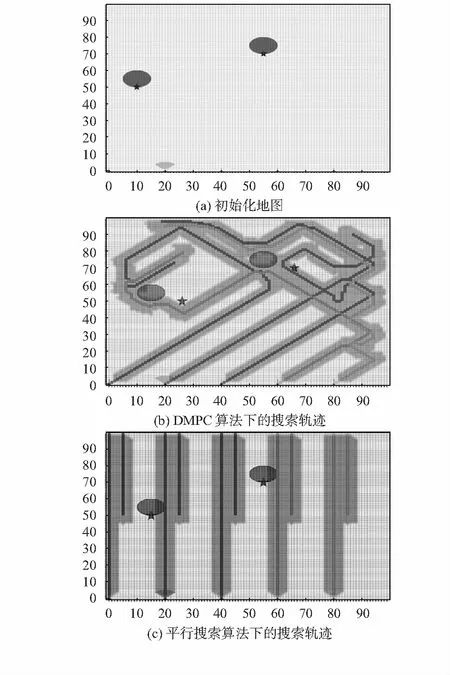
图5 搜索地图及搜索轨迹
如图5(b)所示,使用DMPC算法在72 s时,搜索到目标t1,108 s时搜索到目标t2。图5(c)为平行搜索法下的搜索轨迹,47 s时探测到目标t1,132 s时搜索到目标t2。虽然平行搜索算法先行搜索到目标t1,但所有目标搜索到的总时间更长,且每个阶段的搜索区域覆盖率都比DMPC算法下的搜索结果低。
表1所示,DMPC在108 s时间内的覆盖率为42.10 %,而平行搜索算法在132 s的搜索任务执行下只实现了39.92 %的覆盖率。随着搜索任务的进行,由表2可以看出:在统计的多个时间段里DMPC算法的覆盖率都是高于平行搜索算法。

表1 搜索到目标的时间及覆盖率对比
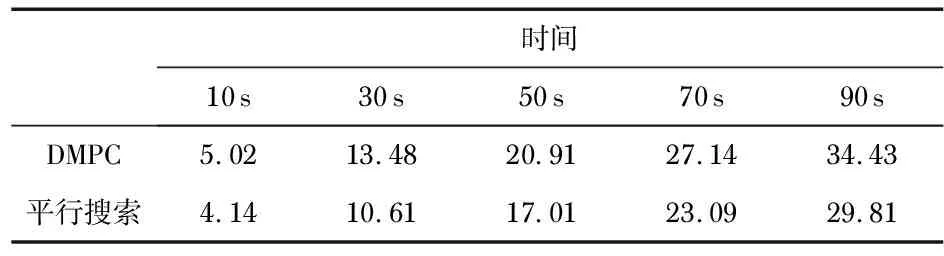
表2 覆盖率随时间的变化 %
5 结 论
本文研究了通信受限条件下UAV群协同搜索问题,利用模型预测控制的滚动时域优化特点,针对海上舰船目标搜索任务提出了一种多UAV分布式协同搜索算法。与传统平行搜索算法相比,该算法能够实现避障,并以更高的效率实现目标搜索任务。除了通信范围受限问题,在实际的环境中,通信延时、数据包丢失等更复杂的情况将在未来的工作中进一步的研究。
猜你喜欢
现代电力(2022年2期)2022-05-23
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
军民两用技术与产品(2021年2期)2021-04-13
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
雷达与对抗(2015年3期)2015-12-09
中央民族大学学报(自然科学版)(2014年1期)2014-06-11
小学阅读指南·高年级版(2014年2期)2014-05-27
