
智能网联环境下多车道异质交通流建模与仿真
2023-01-05 11:33单肖年万长薪李志斌张小丽曹昌衡
交通运输系统工程与信息 2022年6期
单肖年,万长薪,李志斌,张小丽,曹昌衡
(1.河海大学,土木与交通学院,南京 210024;2.东南大学,交通学院,南京 211189;3.上海市政交通设计研究院有限公司,上海 200030)
0 引言
随着车路协同与智能网联技术的发展,具有车车通信、环境感知、车辆协同控制等功能的新一代智能网联自动驾驶车辆(Connected and Autonomous Vehicle,CAV)将逐步取代传统的人工驾驶车辆(Human Driving Vehicle, HDV)[1]。然而,HDV 并不能够在较短的时间内全部替换为CAV,CAV 渗透率将逐步由0 增长至100%,未来道路交通中由HDV 与CAV 组成的异质交通流将普遍存在。因此,探究HDV 与CAV 组成的异质交通流运行特征对于未来道路车辆管理与控制具有重要的研究价值。
对异质交通流的研究,按车辆运行行为特征可分为纵向跟驰行为和横向换道决策研究。跟驰行为模型,即是刻画HDV 与CAV 不同的跟驰行为,分析不同CAV 渗透率条件下单车道异质交通流运行特性。秦严严等[2-3]使用智能驾驶员模型(Intelligent Driver Model, IDM)、自适应巡航控制(Adaptive Cruise Control,ACC)以及协同自适应巡航控制模型(Cooperative Adaptive Cruise Control,CACC)描述HDV 及CAV 在不同组合模式下的跟驰行为,估计了异质交通流平衡态条件下的流密速函数关系。吴德华等[4]考虑了CAV与HDV 混合排序方式的不同,并引入相对熵指标,探究了CAV队列对道路通行能力的影响。姚志洪等[5]选用IDM分析异质交通流平衡态下的稳定性,通过调整IDM参数刻画CAV 及HDV 的跟驰行为差异性,研究表明,CAV 的渗入能够提升混合交通流的稳定性,且当其渗透率超过75%时,平衡态异质流稳定性将不受速度的影响。吴兵等[6]提出一种考虑多前车影响的CAV 跟驰模型,分析10 辆车构成的异质交通流安全水平,发现CAV 渗透率的增加能显著降低车辆尾部碰撞安全风险。
而对于换道决策模型,即是建立HDV 和CAV在不同模式下的换道行为模型,分析CAV 换道行为对交通流运行的改善。田勇达[7]以车辆换道的效率、舒适度和油耗为目标,以车辆位置、速度、加速度的安全为约束条件,求解得到最优的CAV 协同换道轨迹。李珣等[8]考虑CAV间信息交互,提出多车道CAV 的协同换道模型STCA(Symmetric Twolane Cellular Automata)。刘志强等[9]以MOBIL(Minimizing Overall Braking Induced by Lane Changes)为基础,提出智能网联环境下的多车协同换道模型。Talebpour等[10]综合考虑HDV与CAV跟驰及换道行为差异性,提出基于博弈论的CAV 换道模型,并与间隙接收模型和MOBIL 模型进行对比,分析了不同CAV 渗透率条件下的交通效率。近期,吴德华等[11]考虑CAV 的集聚效应,选用相对熵和交通量分析4 种CAV 换道策略在不同CAV 渗透率条件下的异质交通流有序性和效率,结果表明,换道策略能使CAV形成队列,一定程度上提升了道路通过能力。
综上所述,对于多车道异质交通流的建模与分析,应综合考虑HDV 与CAV 的跟驰和换道行为的差异性,现有研究主要关注换道行为对交通流效率的提升,缺乏考虑CAV 车辆换道行为后的跟驰模式退化特征,对异质交通流的综合评价效益缺乏讨论,同时对同一类型车辆积聚与分离效应的影响讨论较少。本文分析异质交通流中的车辆跟驰特性,并分别利用IDM 及CACC,刻画了HDV 与CAV 不同模式下的跟驰行为;提出基于STCA 及MOBLE的改进换道模型,用于匹配不同跟驰模式下车辆的换道行为,并仿真分析了多车道异质交通流运行特征。本文研究内容可为未来道路交通管理与控制提供参考依据,具有重要的理论及实践价值。
1 异质交通流车辆跟驰模型
ACC 和CACC 是智能网联车辆典型的跟驰控制方法。ACC 利用车载检测设备获取前车的位置、速度、加速度等信息,实现加速度优化控制[12-13]。CACC 是在ACC 的基础上,利用车车通信的技术,与前车进行信息交互,实现前后车的协同驾驶,形成CAV车队[14-15]。当某CAV正处于CACC状态时,由于车辆换道行为,HDV换至该CAV前方位置,则CACC 自动退化至ACC,但该车辆仍与紧跟其后的CAV 实现车车通信。由此,在CAV 与HDV 混行的异质交通流中,存在人工驾驶控制(Human Driving Control,HDC)、ACC、CACC这3种跟驰模式,如图1 所示。HDV 仅能保持HDC 跟驰模式,而CAV前车为CAV时,该CAV为CACC跟驰模式,否则为ACC跟驰模式状态。

图1 异质交通流车辆跟驰模式Fig.1 Vehicle car-following modes of heterogeneous traffic flow
针对上述3种跟驰模式,IDM模型能够呈现真实的交通流现象,如震荡、迟滞、失效等,可有效地反映人类驾驶员的跟驰行为特征,故采用IDM 模拟HDC 的车辆跟驰过程。当CAV 跟驰HDV 时,CAV无法通过车车通信技术直接获取前车信息,只能通过摄像头、雷达等车载检测设备获取前车位置、速度等信息,这与人类驾驶员获取前车信息方式具有相同之处,不同之处在于信息获取的准确性和时效性。IDM 模型作为智能网联车辆的纵向控制模型,得到了国内外学者的一致认可[4-5,16-17]。结合ACC 跟驰特点及相关研究工作,选用IDM 模型模拟ACC的跟驰过程。考虑到ACC在前车信息获取上更为精确及具有更高的时效性,可以采用不同的安全跟车时距区分ACC与HDC两种不同的跟驰模式。此外,采用PATH(Partners for Advanced Transportation Technology)实验室提出的CACC 模型描述CACC 的跟驰模式。最新的IDM 和CACC模型分别为
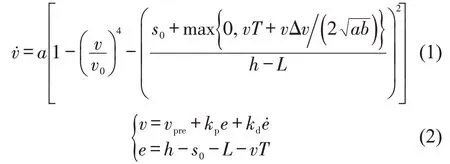
式中:v̇为本车加速度;a,b为车辆的最大加速度,舒适减速度;v0为车辆的自由流速度;v为本车当前速度;s0为车辆最小安全间距;T为安全跟车时距,不同跟驰模式下的车辆跟车时距是不同的,根据最新研究成果[2,4],建议HDC 取1.6 s,ACC 取1.1 s,CACC 取0.6 s;Δv为本车与前车速度差;h为本车与前车的车头间距;L为车长;vpre为上一时刻CACC车辆速度值;e为实际车头间距与期望车头间距误差值;ė为车头间距误差值的微分;kp、kd为控制参数。
由此,车辆在跟驰过程中的速度信息更新如下。
当车辆处于HDC及ACC跟驰模式时

当车辆处于CACC跟驰模式时

在速度更新的基础上,车辆位置更新为

式中:t为当前仿真时刻;ΔT为单位仿真步长;an,IDM为IDM计算得到第n辆车的加速度;vn为第n辆车的速度;en为第n辆车实际车头间距与期望车头间距误差值;Δen为第n辆车车头间距误差值的变化值,Δen(t)=en(t)-en(t-ΔT);xn为第n辆车的位置。
2 多车道异质交通流车辆换道模型
2.1 双车道CAV换道模型
智能网联汽车能够在通信范围内实现车辆位置、速度、加速度等信息的交互,MOBIL 换道模型[18]综合考虑了当前车、原跟随车、目标车道跟随车的加速度收益,被广泛应用于智能网联汽车换道决策[9,19-20],适合作为ACC 与CACC 跟驰模式的换道模型。MOBIL 模型由换道车辆(Subject Vehicle,SV)、目标车道跟随车辆(Putative Following Vehicle,PFV)、原跟随车辆(Following Vehicle,FV),三者综合加速度收益构成,表达式为

式中:GSV为CAV 换道产生的综合加速度效益值;aSV,aFV,aPFV分别为换道前本车、原跟随车、目标车道跟随车加速度值;a͂SV,a͂FV,a͂PFV分别为换道完成后本车、原跟随车、目标车道跟随车加速度值。
当PFV、FV 为HDV,或SV 与PFV、FV 之间车头间距大于车辆DSRC 通讯范围(sc)时,对应车辆加速度值将缺省为0。在其他情况下,当且仅当综合加速度效益值大于等于综合加速度收益阈值(Δath)时,本车才会产生换道动机,即

此外,在异质交通流条件下,由于HDV 混入,若原车道前车为CAV,目标车道前车为HDV,换道成功后将导致CAV 的跟驰模式由CACC 退化为ACC,进而导致换道车辆跟驰效率的降低。故在MOBIL 模型基础上,考虑换道引起车辆跟驰模式的改变,提出异质交通流条件下CACC 换道模型。具体为,若换道会导致CACC 跟驰模式退化(CACC→ACC)时,本车自身加速度效益也需要满足自身加速度效益阈值(ΔaSV),即

同时,车辆换道需要满足安全判断条件,要求换道后的SV、PFV、FV 的加速度要大于安全减速度;换道后的车头间距要大于等于最小安全车距,避免碰撞和急刹车的情况出现,即

式中:bsafe为安全减速度;xSV,xFV,xPFV分别为换道时本车、原跟随车、假定目标车道跟随车的纵向位置;ssafe为换道所需要的最小安全车距。
对于ACC 而言,其换道行为不会导致跟驰模式退化的特征,可由MOBIL模型控制,即在双车道场景下,CAV 通过比较车辆换道前后的加速度收益,当加速度收益超过收益阈值、且换道满足安全条件时,车辆选择换道。若车辆在当前车道的前车为HDV,目标车道的前车为CAV,即换道行为会激发车辆跟驰模式的升级(ACC→CACC),此时换道加速度效益值均会超过阈值,满足安全条件下CAV将发生换道。上述换道过程意味着MOBIL模型诱导CAV 车辆自发的由ACC 模式向CACC 模式转变,能较好模拟CAV 在ACC 模式下换道行为对周围交通流的改善以及对自身跟驰模式升级的追求。
2.2 双车道HDV换道模型
对于HDV 的换道模型,选用Chowdhury 等[21]提出的STCA换道模型,该模型能较好地模拟均匀交通系统内人工驾驶车辆的换道行为。考虑STCA 模型实施场景为元胞自动机模型,所以对STCA 模型进行改进,使其适用于连续微观交通流模型。改进的STCA模型中的换道动机为

同样地,HDV换道也需要满足安全条件,人工驾驶车辆在符合换道动机的条件下,需要避免车辆碰撞以及急刹车情况的出现,即

2.3 多车道异质交通流换道模型
不同于上述双车道换道模型,在多车道条件下,车辆可能存在多个假定目标车道。以单向3车道为例,处于内侧、外侧车道的车辆,可认为其只存在换至中间车道这一种选择;但处于中间车道的车辆,存在内侧、外侧两种换道选择,即存在两个假定的目标车道。
对于HDV而言,若内、外侧车道都能符合其换道规则,考虑其不能准确获取换道效益,将随机选取一条车道进行换道;对于CAV 而言,若内、外侧车道均符合其换道规则,则通过内、外侧换道效益差值,使用二元Logit 函数[22]计算其换至左侧车道的概率值,通过蒙特卡洛方法生成随机数确定车辆换道行为,完成车辆换道,即

式中:GSV,L为目标车道是左侧车道时的综合加速度效益值,GSV,R为目标车道是右侧车道时的综合加速度效益值;pL为选择左侧车道的概率;pR为选择右侧车道的概率。
多车道异构交通流车辆换道示意图和流程图如图2和图3所示。图2中,LFV、LLV和RFV、RLV分别表示左侧和右侧的前车、跟驰车。由图可知,当LFV、FV 为CAV 时,中间车道的SV 能通过车车通信技术接收车辆换道加速度收益值,计算左侧及右侧的综合受益值,并根据该受益值按式(14)~式(16)确定换道概率,通过蒙特卡洛法确定换道方向。
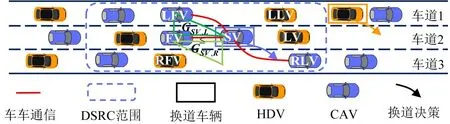
图2 多车道异质交通流车辆换道示意图Fig.2 Sketch map of vehicle lane changing behavior in Multi-lane heterogeneous traffic flow
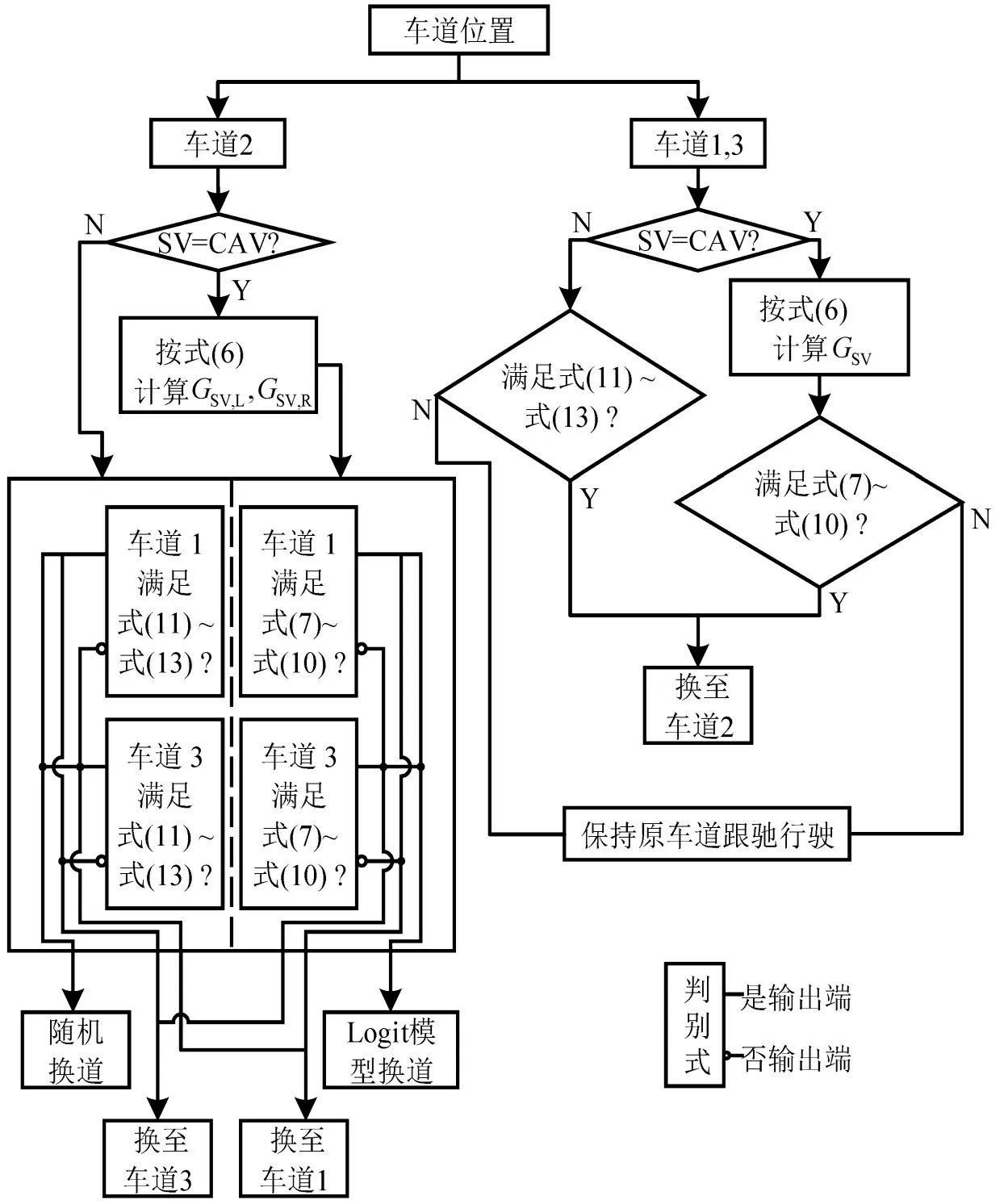
图3 多车道异质交通流车辆换道流程图Fig.3 Scheme of vehicle lane changing behavior in Multi-lane heterogeneous traffic flow
3 异质交通流仿真模拟
3.1 仿真参数设置
利用Matlab建立异质交通流仿真模型,仿真道路长1200 m,车辆初始按密度随机生成于道路中,设置仿真时间为3600 s,单位时间步长为0.1 s,换道间隔服从N~(5.69,1.35)的随机小数[23],前2400 s为系统预热时间,取后1200 s 为结果分析数据,为消除随机性引起的误差,结果取3次仿真实验的平均值。由于缺乏真实智能网联汽车换道的相关数据,无法进行换道模型参数标定,本文借鉴其他研究者对跟驰及换道模型的取值[2,4,17,20],模型仿真参数设置如表1所示。
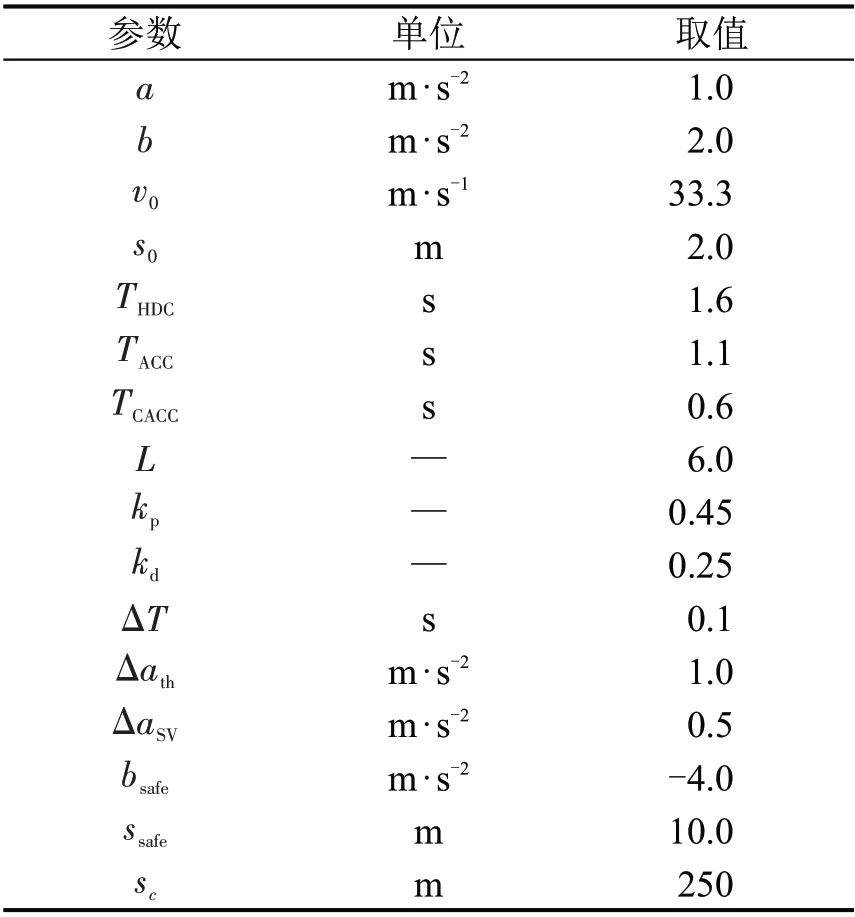
表1 模型参数取值Table 1 Parameters values of models
3.2 流量密度基本图
本文分析不同CAV 渗透率下不同车道数的异质交通流流量密度基本图特征,如图4所示。仿真结果表明,各密度下的道路交通通行能力与CAV渗透率呈正相关趋势;考虑CAV渗透率越高,对应相同密度下ACC、CACC 跟驰模式的车辆越多,使得CAV 车辆间能以更小的跟车间距保持高速行驶,进而提升了HDV车辆的行驶速度,使道路通行能力得到提升。
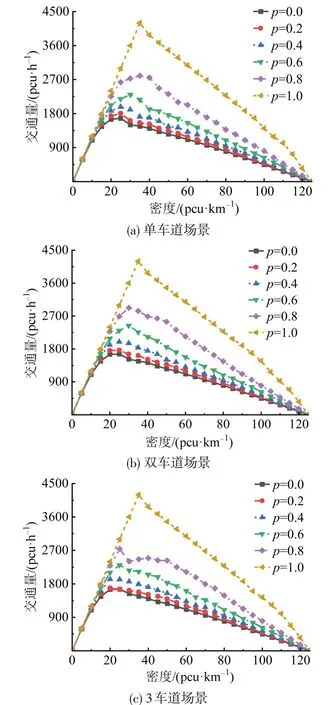
图4 多车道异质交通流流量密度基本图Fig.4 Fundamental diagram of multi-lane heterogeneous traffic flow
对比分析不同车道场景的基本图差异性,可计算其在不同渗透率下相较于全人工驾驶条件下通行能力的提升程度,以及通行能力对应临界密度值,结果如表2 所示。在CAV 渗透率较低的场景下,即渗透率低于60%时,道路通行能力提升程度较低,最大提升程度为38.1%,约为2300 pcu·h-1;在高CAV 渗透率条件下,各场景道路通行能力提升程度随CAV 渗透率的增加而显著提升,当渗透率为100%时,道路通行能力可达4200 pcu·h-1,提升150%;同时,随着CAV 渗透率的增加,临界密度逐渐由25 pcu·km-1增长至35 pcu·km-1。

表2 不同场景下道路通行能力提升程度及临界密度值Table 2 Road capacity and the best density for different scenarios
此外,考虑到换道行为的影响,3车道的道路通行能力略微低于单车道道路通行能力,而双车道在不同渗透率下稍微高于单车道通行能力,这是由于换道行为能促使不同CAV 车辆进行积聚,逐渐形成ACC、CACC 跟驰模式,提高道路通行能力。具体而言,双车道与跟驰场景在不同渗透率条件下对应临界密度近似相同,而3车道场景临界密度相较于跟驰场景发生了左偏。可以发现,双车道对于通行能力的提升效果最好,跟驰场景其次,3车道场景提升程度最低。说明,在低中CAV渗透率条件下,交通流在更低的密度下到达了临界状态,3 车道车辆换道行为恶化了车辆原有的交通流环境,引起道路通行能力下降。
3.3 换道行为特征
为了剖析多车道异质交通流的道路交通通行能力特征的微观原因,本文分析不同场景下车辆类型的换道行为特征,如图5 所示。总体而言,异质交通流换道频率特征可按密度分为3个阶段。第1阶段对应密度区间约为0~20 pcu·km-1,此时交通流接近于自由流状态,车车间存在足够的换道间隙,容易出现“乒乓换道”的现象,使得这一阶段换道频率与CAV 渗透率之间的关系不明显。第2 阶段对应密度区间约为20~100 pcu·km-1,在此密度条件下,3 车道车辆换道频率峰值高于双车道,车辆换道频率与交通流密度呈“上凸”状。当密度大于100 pcu·km-1时,由于车辆密度高,换道空间受限,基本不发生换道行为。

图5 多车道异质交通流换道行为特征Fig.5 Lane changing behavior features of multi-lane heterogeneous traffic flow
此外,当车辆均为HDV或CAV,即交通流为同质流时,车辆基本不发生换道行为,车辆基本按跟驰模型行驶。考虑同质流条件下车车跟驰模式保持一致,可按车道将车辆看成一列车队,尽管初始状态下车队内车辆车头间距不同,但经过预热时间的仿真,车队内车辆速度、车头间距基本保持一致,不会或较少触发换道动机,所以车辆基本不发生换道行为。
对于不同车辆类型的换道行为,如图6 和图7所示,随着CAV渗透率的增长,HDV换道频率凸形线峰值越大;对于CAV 而言,渗透率越高,凸形线峰值越低。对于CAV 而言,换道峰值对应的密度当CAV 渗透率较低时,交通流中大部分车辆为HDV,CAV换道决策时无法确定FV与PFV的换道加速度受益值,且CAV 无需考虑跟驰模式改变所需的自身加速度收益,放宽了CAV 车辆的换道条件,故低渗透下CAV 换道频率峰值较高;同理,在高渗透率条件下,CAV占大多数,HDV被CAV所包围,放大了HDV与CAV跟驰模式的差异,容易激发HDV 车辆的换道行为,对应高渗透率下HDV 换道频率高于低渗透条件下。同时相较于双车道,3 车道在相同交通流密度条件下,位于中间车道的车辆能有两个可能换道方向,所以换道欲望要强于双车道,故3车道换道频率高于双车道。
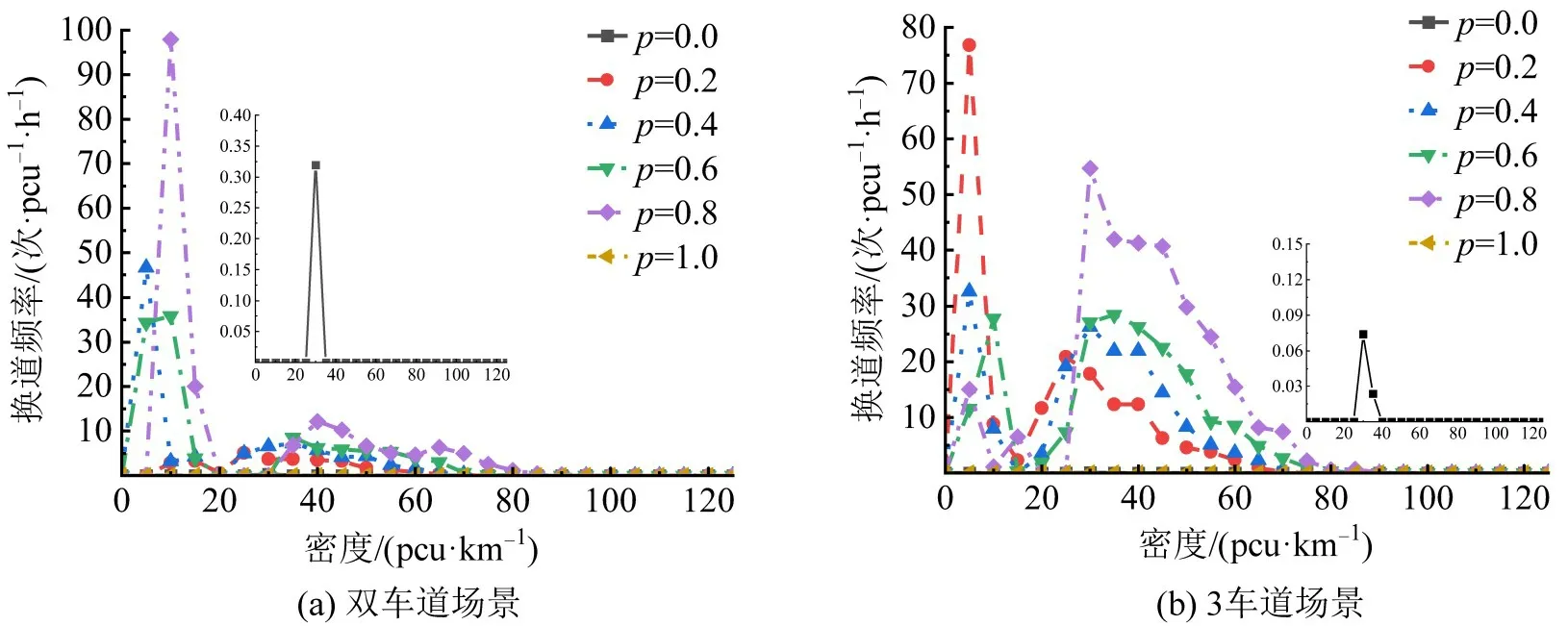
图6 人工驾驶车辆换道频率Fig.6 Lane changing frequency of human-driving vehicles

图7 智能网联车辆换道频率Fig.7 Lane changing frequency of connected and automated vehicles
4 多车道异质交通流仿真效益评价
本文提出交通量效益和交通秩序效益两个评价指标,分析不同渗透率和不同密度条件下的异质交通流仿真效益。交通量效益用于描述多车道场景相比于单车道场景的交通量提升效果;该值越大,说明同等条件下由于多车道换道行为带来的交通量收益越大。交通秩序效益用于描述多车道场景相比于单车道CACC模式排序次数提升程度,反映换道对异质交通流中CACC 跟驰模式排序次数的提升;该值越大,说明相同条件下换道行为对CACC 跟驰模式排序次数提升越大。上述两个评价指标的计算公式为

式中:qij,m为第i种CAV 渗透率,第j种密度条件下,第m类场景的交通量效益,m=1表示单车道跟驰场景;Qij,m为第i种CAV 渗透率,第j种密度条件下,第m类场景的仿真交通量;eij,m为第i种CAV渗透率,第j种密度条件下,第m类场景的交通秩序效益,m=1 表示单车道跟驰场景;Eij,m为第i种CAV 渗透率,第j种密度条件下,第m类场景的CACC 跟驰模式排序次数,为仿真统计时间内CACC 排序次数的平均值;Nij,m=1为第i种CAV 渗透率,第j种密度条件下,单车道跟驰场景的车辆跟驰模式总排序次数,数值上等于仿真车辆数。
双车道异质交通流仿真效益评价如图8 所示。交通量、换道秩序的正向效益密度范围随CAV渗透率的增加而扩大;且交通秩序效益与交通量效益基本呈正相关,即正向交通秩序效益往往对应正向的换道交通量效益值。说明,双车道中换道行为能有效提升CACC车辆的排序次数,将异质交通流分离为CAV 交通流和HDV 交通流,引起交通量的提升。
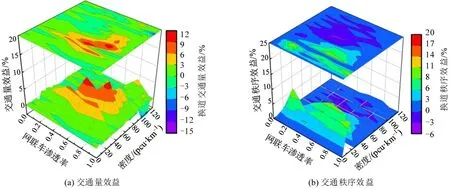
图8 双车道异质交通流仿真效益Fig.8 Simulation results of two-lanes heterogeneous traffic flow
对于3 车道而言,仿真结果如图9 所示。研究发现,在靠近临界密度的左侧和远离临界密度的右侧,与双车道结论相符;在靠近临界密度的右侧,虽然此时交通秩序效益为正值,即相当于跟驰场景,CACC跟驰模式排序次数有所提升,但此时交通量效益为负值。以CAV渗透率等于0.8为例,此渗透率条件下临界密度为30 pcu·km-1;分别选取密度为20,35,75 pcu·km-1,绘制仿真场景时空图,从上至下依次为车道1、车道2 与车道3 的车辆行驶轨迹,如图10~图12所示。通过时空图可以发现:当密度为20 pcu·km-1时,异质流在预热时间前即完成了不同类型车辆的分离与积聚,直至3600 s 仿真结束,交通流一直处于有序状态,故比同密度条件跟驰场景具有更高的行驶效率;当密度为35 pcu·km-1时,异质交通流从第2400 s直至3600 s,一直处于CAV与HDV 的混合状态,虽然换道行为提高了CACC跟驰模式排序次数,但换道行为对于车辆跟驰造成较大阻碍,引起局部堵塞,激发了交通震荡,故此密度下换道交通量效益为负;而在远离临界密度的右侧,当密度为75 pcu·km-1时,虽然异质交通流未完成分离,但车辆在该密度下能保持的跟驰车速较低,交通秩序效益对交通量的提升要大于换道引发堵塞引起的交通量降低,故该密度范围内换道交通量效益为正值。
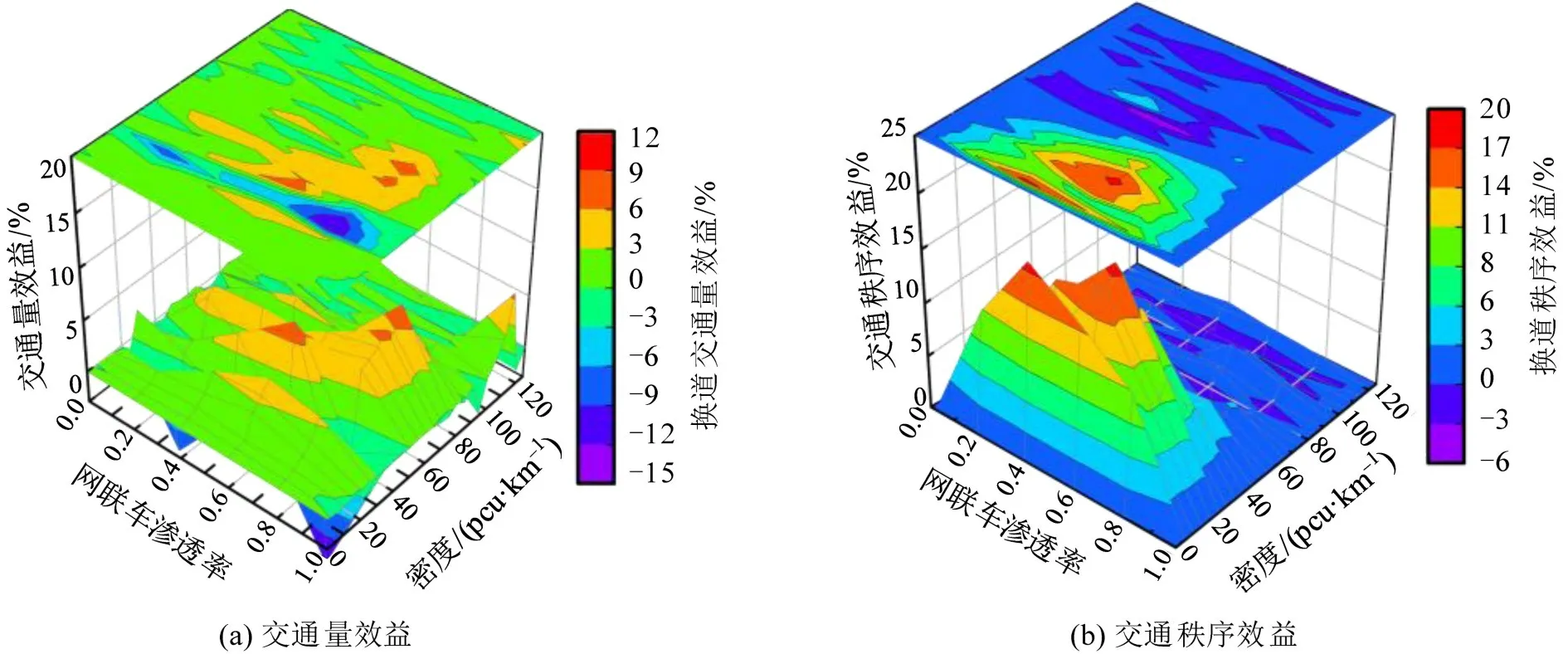
图9 3车道异质交通流仿真效益Fig.9 Simulation results of three-lanes heterogeneous traffic flow
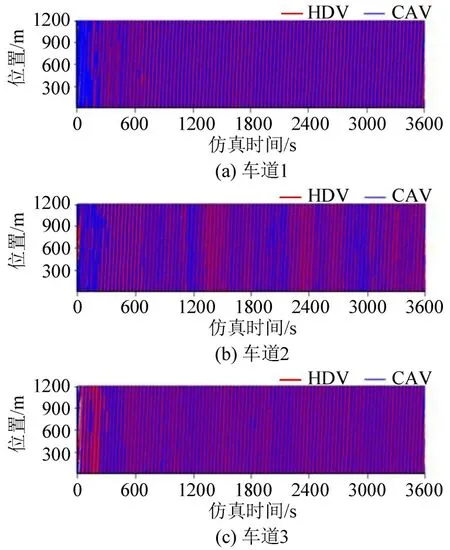
图10 密度为20 pcu·km-1,渗透率为0.8 条件下多车道时空图Fig.10 Time-space diagram with density of 20 pcu·km-1 and CAV penetration rate of 0.8

图12 密度为75 pcu·km-1,渗透率为0.8 条件下多车道时空图Fig.12 Time-space diagram with density of 75 pcu·km-1 and CAV penetration rate of 0.8
5 结论
本文构建了智能网联环境下多车道异质交通流不同类型车辆的跟驰及换道模型,仿真分析了道路通行能力及车辆换道行为特征。结果表明:当CAV 混入率达到100%时,车道通行能力增长至4200 pcu·h-1,且车道数对道路通行能力的影响不显著;同时,车辆换道频率与交通流密度总体上呈“上凸”状,随着CAV混入率的增加,HDV换道频率峰值呈现增长趋势,而CAV 换道频率峰值呈下降趋势。此外,提出了双车道及3车道的交通量及交通秩序评价效益指标,随着CAV混入率的增长,双车道交通量及交通秩序效益呈扩大且正相关特征,3 车道交通量及交通秩序效益呈现局部负相关特征。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
家庭教育报·教师论坛(2021年42期)2021-12-23
浙江大学学报(理学版)(2021年4期)2021-07-21
河北画报(2021年2期)2021-05-25
北方论丛(2021年2期)2021-05-22
发电技术(2021年1期)2021-03-16
煤炭工程(2019年12期)2019-12-24
计算机系统应用(2019年6期)2019-07-23
汽车文摘(2014年2期)2014-12-14
