纯电动汽车制动能量回收策略研究与仿真分析
2023-01-17 07:16秦揽悦
江苏理工学院学报 2022年6期
秦揽悦,李 丽
(江苏理工学院 汽车与交通工程学院,江苏 常州 213001)
随着经济社会的发展,我国汽车保有量越来越大,由此引发的环境污染和化石能源紧缺问题也愈加严重。由于具有零排放、零污染的优势,纯电动汽车已逐渐成为汽车领域研究的热点[1]。目前,纯电动汽车大多采用蓄电池作为主要动力源,由于蓄电池普遍功率密度较小,导致汽车续航里程偏低,严重阻碍了纯电动汽车的产业化进程。开发高性能动力电池无疑能够有效增加纯电动汽车的续航里程,然而,短期内相关技术的商业化应用尚存在一定困难;因此,如何高效利用电动汽车上所搭载的有限能量,成为亟待解决的问题。
制动能量回收是提高蓄电池能量利用效率的有效方法之一[2]。电动汽车在进行减速制动时会产生大量的动能,这些能量大部分会转化为热能发散,造成能量浪费。制动能量回收是指在汽车进行减速或刹车等制动行为时,将产生的部分动能转化为电能,并贮存到蓄电池中,从而为后续汽车的驱动过程补充能量[3-4]。目前,国内外研究者对能量回收策略进行了大量的研究。Siddartha等人[5]提出了一种新的制动能量回收策略,在原有控制策略的基础上对车辆前后轮的制动力进行重新分配,从仿真结果可以看出,该控制策略可以将制动能量的回收效率增加30%以上;但该方法并未考虑电池荷电状态(State of Charge,SOC)对制动能量回收的影响。Panagiotidis等人[6]在并联混合动力汽车的基础上构建了基于驾驶人意图的制动模型,并对所设计的能量回收模型进行了仿真验证,结果表明,所设计的能量回收模型能够使混合动力汽车的燃油经济性和续航里程得到显著提高;但研究中没有考虑到影响再生制动的因素。高爱云等人[7]以并联式混合动力汽车为例,提出了一种基于最佳制动效果的制动能量回收控制策略,并利用ADVISOR对其进行仿真分析,在此基础上进行了硬件在环仿真试验,结果显示,该控制策略可以有效提高汽车的能量利用率和人员的驾驶舒适性;但该研究中未考虑到车速v对制动能量回收的影响。
由于纯电动汽车制动能量的回收是一个非常复杂的过程,受到诸多因素的影响且总体上呈非线性变化;因此,其与模糊控制方法的实际应用场合非常匹配。本文在已有研究的基础上,以后驱动式纯电动汽车作为研究对象,提出了一种基于模糊控制的制动能量回收策略。通过引入SOC作为考虑因素,在Matlab/Simulink中搭建了控制策略的仿真模型,并嵌入到基于ADVISOR搭建的纯电动汽车整车模型中,在NEDC及FTP75工况下对该控制策略进行了仿真分析。结果表明,本文所设计的能量回收策略能够有效地提高纯电动汽车的续航里程和整车能量利用率。
1 制动能量回收原理
如图1所示,纯电动汽车的制动系统主要以电机制动为主,其主要结构包括传感器、制动控制器、电机等。当电机制动时,其输出转矩为负值,转速下降,在实现减速刹车的同时将部分动能转化为电能贮存在蓄电池中。
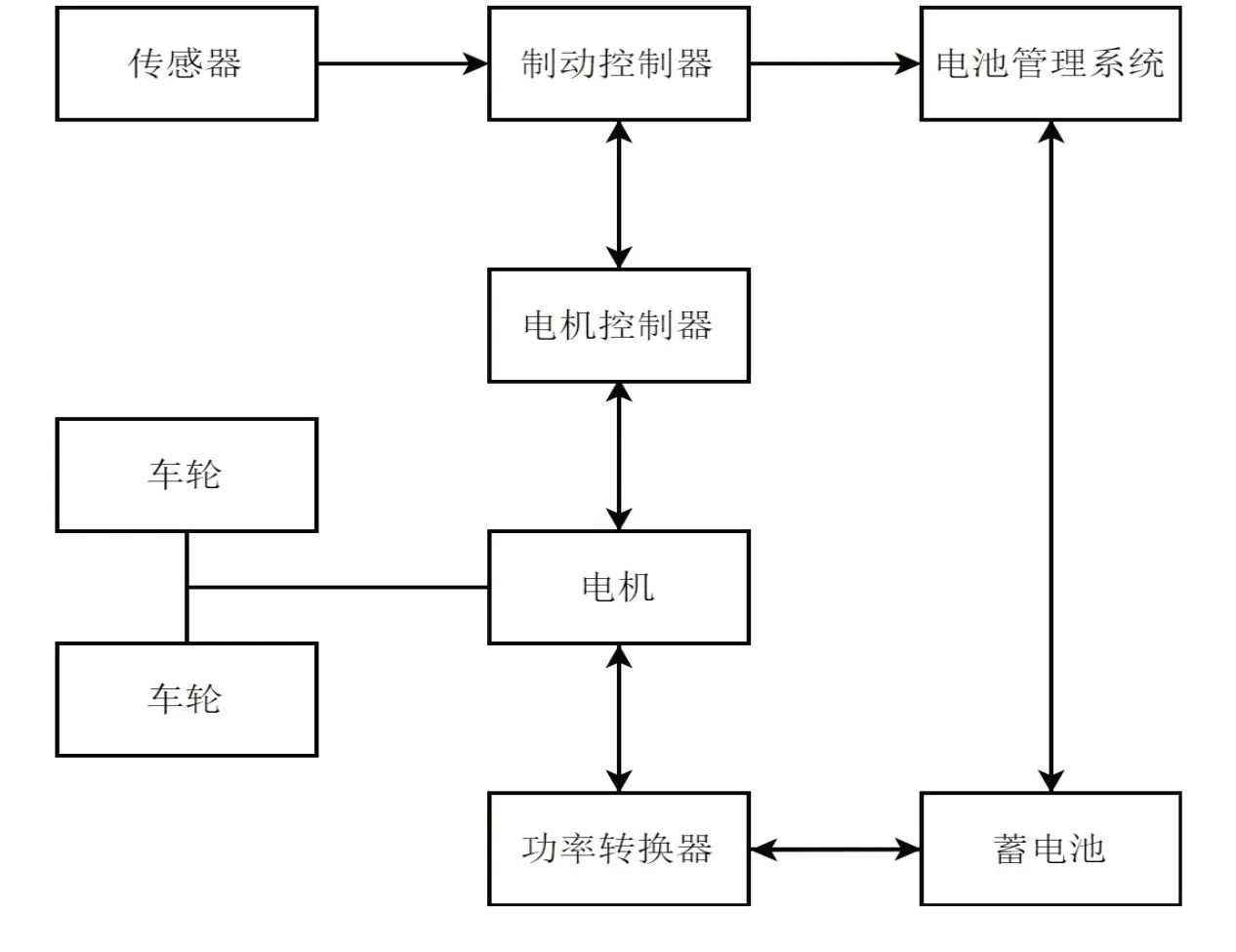
图1 电机制动系统结构
单纯的电机制动并不能完全满足汽车行驶过程中的制动力需求;因此,目前纯电动汽车的制动力由电机制动力和机械制动力两部分组成,并由制动控制器基于制动信号进行制动力分配。为了提高纯电动汽车的能量利用率和续航里程,电机制动和机械制动相结合的制动系统应当在保证汽车安全性的同时,尽量增加电机制动的制动力占比,以提高纯电动汽车的经济性。
2 制动能量回收策略制定
制动能量回收策略的制定包括两个要点:一是对汽车的前轮和后轮的制动力进行分配;二是对驱动轮上的电机制动力和机械制动力进行分配。ADVISOR自带的制动力分配策略仅以汽车的当前车速作为依据,根据车速查表来实现对制动力的分配。如图2所示,为具体控制规则。根据图2,ADVISOR自带的制动力分配策略只考虑车速对制动力分配的影响,没有考虑到其他因素。然而,影响再生制动的因素很多,如SOC反映了电池的剩余电量,它直接影响了电池充电的效率,从而对制动能量回收的效率产生影响[8]。因此,使用该控制策略所回收的能量十分有限,汽车制动时所产生的大部分能量未能得到有效利用[9]。为达到对制动力更加精准的控制,进一步提高制动能量的利用率,本文在ADVISOR自带控制策略的基础上,将SOC对制动力的影响列入到考察之中,通过分析车速v和电池SOC对制动力分配的影响,来研究制动力分配策略,并确定其分配方案。
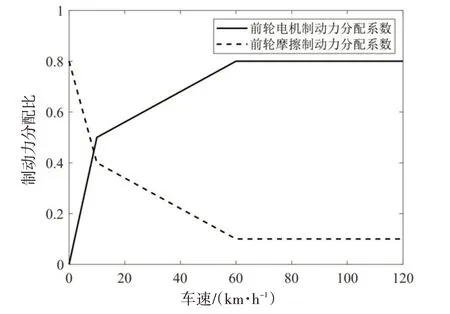
图2 ADVISOR制动力分配曲线
2.1 制动力分配方案
本文以电池SOC以及车速v作为输入量,以电机制动力占比K为输出量,对电机制动力和机械制动力进行分配,并通过制动系统实现制动及制动能量的回收。如图3所示,为控制策略流程。根据图3,总制动力包括电机制动力和机械制动力两部分:电机制动力占比为K,它决定了电机制动力的大小;相应的,机械制动力占比为1-K。设定在后轮总制动力未超过最大限度时,前轮机械制动力与后轮机械制动力相同,为(1-K)/2,当后轮总制动力达到最大限度时,前轮机械制动力为总制动力减去后轮总制动力[10]。
2.2 模糊控制器设计
影响制动能量回收的因素很多,模糊控制相对于其他控制方法能够更好地应对这种复杂场景;因此,本文选择模糊控制策略。根据图3,模糊控制器以电池SOC以及车速v作为输入量,以电机制动力占比K为输出量。

图3 控制策略流程图
2.2.1 隶属度函数确定
在设计模糊控制器时,首先,要确认论域范围和模糊子集的数量;其次,确定各个输入、输出变量隶属度函数的范围和形状。
(1)电池SOC
电池SOC表示剩余电量,SOC的大小直接决定着电动汽车的充电效率和续航里程:SOC越高,电池充电效率越低;SOC越低,电池充电效率越高。本文将电池SOC的论域范围设置为[0,1],并划分为{低,中,高}三个模糊子集,分别以{S,M,B}表示。其中:S、B选用高斯型函数;M选用钟形函数。如图4所示,为电池SOC隶属度函数。

图4 电池SOC隶属度函数
(2)车速v
车速v是影响能量回收效率的重要因素:车辆在低速行驶时,可被回收能量较少;在高速行驶时,电机制动的参与率增大,此时可被回收的能量增多。本文将车速v的论域设置为[0,80],划分为{低速,中速,高速}三个模糊子集,分别用{S,M,B}表示,选用梯形函数作为隶属度函数类型。如图5所示,为车速v隶属度函数。

图5 车速v隶属度函数
(3)电机制动力占比K
将电机制动力占比K的论域设定为[0,1],再划分为{极小,小,中,大,极大}五个模糊子集,分别用{VS,S,M,B,VB}表示,选用三角形作为隶属度函数类型。其中:VS表示仅有机械制动,电机没有参与制动;S表示电机制动比例很小;M表示电机参与制动的程度属于中等水平;B表示电机参与制动的程度为中等偏大,比M略多;VB表示主要为电机制动。如图6所示,为电机制动力占比K隶属度函数。

图6 电机制动力占比K隶属度函数
2.2.2 模糊控制规则制定
在模糊控制规则制定模块,采用If-Then形式,即if SOC is A andvis B,then K is C。通过对纯电动汽车能量管理问题的研究,本文所提出的模糊控制规则其原则主要包括:当SOC较高时,表示电池剩余电量较多,此时电机不制动或制动比例小;当电池SOC处于中间或较低时,此时电机制动比例大;当车速v较低时,可回收制动能量很少,电机基本不参与制动;当车速v较高时,可回收制动能量多,此时电机制动比例增大。如表1所示,为根据以上原则建立的模糊控制规则。如图7所示,为模糊推理曲面图。
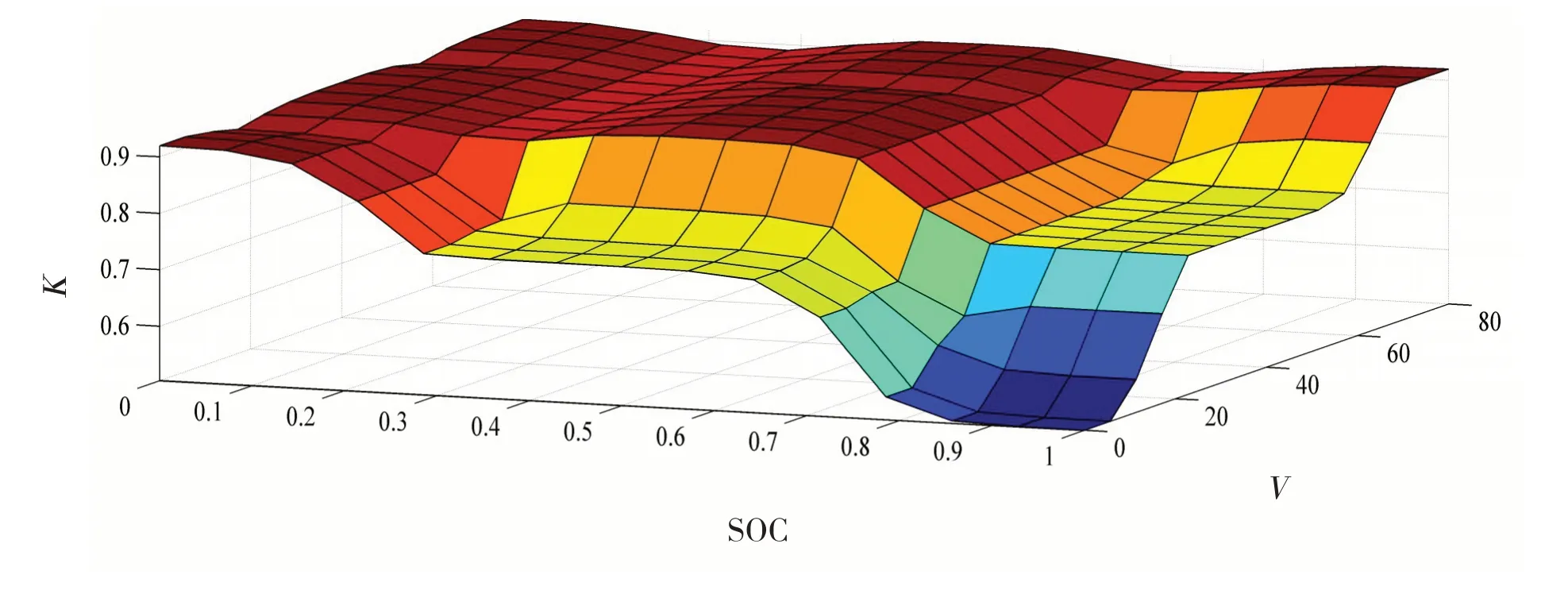
图7 模糊推理曲面图

表1 模糊控制规则表
3 ADVISOR建模与仿真分析
为了验证本文所设计制动能量回收策略的有效性,将所搭建的能量回收策略模型与后驱纯电动汽车模型相结合,并通过ADVISOR软件进行仿真分析。
3.1 整车模型搭建
本文以软件自带的(BD_EV)整车模型为原型,根据从官方网站查询所得的某后驱电动汽车相关参数,对自带模型的各部件m文件内容进行修改,并将驱动模式由自带模型中的前轮驱动更改为后轮驱动,从而搭建出所需要的整车模型。如表2所示为主要参数。

表2 某后驱纯电动汽车主要参数
3.2 仿真结果与分析
与本文控制策略相比,ADVISOR自带的控制策略是固定分配比例,其分配方式是只按照车速去分配制动力,并没有充分考虑到电池SOC、电机的特性以及汽车所行驶的道路状况等因素,因而具有一定的局限性。为了评价本文所提出的制动能量回收策略是否能有效提高纯电动汽车的经济性,将车辆驱动模式由前驱改为后驱,并将所制定控制策略Simulink模型添加到ADVISOR整车模型中。如图8、图9所示,为修改后的前向仿真模块和后向仿真模块。选取NEDC以及FTP75工况作为仿真工况,将本文控制策略与ADVISOR软件自带控制策略就电机扭矩、电池电流、电池SOC、续航里程以及整车能量效率等五个方面进行仿真对比。
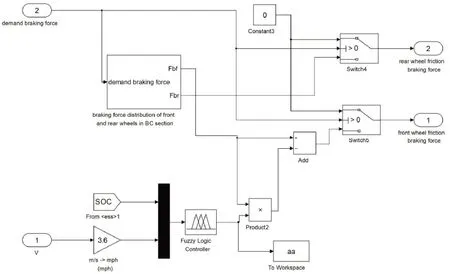
图8 制动力前向仿真模块

图9 制动力后向仿真模块
3.2.1 电机扭矩对比
如图10所示,为电机扭矩在各工况下仿真的变化过程。图10显示,在两种工况下,使用ADVISOR自带控制策略与本文设计的控制策略,其电机正扭矩都是重合的;这是因为电机扭矩大于0时,汽车处于驱动状态,而本文只是对制动策略进行了修改,并没有改变驱动策略,因此,当汽车处于驱动状态时,两种控制策略的正扭矩相同,这是合理的。当汽车处于制动状态时,即电机扭矩小于0时,在两种工况下,本文所设计的控制策略均能使电机负扭矩大于使用ADVISOR自带控制策略时的负扭矩,即当汽车处于制动状态时,采用本文所设计的控制策略可使电机制动力占比较大,从而有利于制动能量的回收。

图10 电机扭矩对比
3.2.2 电池电流对比
如图11所示,为电池电流在各工况下仿真的变化过程。图11显示,在两个工况下,ADVISOR自带控制策略与本文控制策略在电流大于0时的电池电流是重合的。这是因为电池电流大于0代表汽车处于驱动状态,此时电池正在放电,但由于本文只对制动策略进行了修改,所以当汽车处于驱动状态时,两种控制策略的电池电流相同。当汽车处于制动状态时,电池电流小于0,此时电池处于充电状态,在两个工况下,本文所设计的控制策略均能使电池充电时的电流明显大于ADVISOR自带控制策略下的电流。充电电流越大,相同时间下为电池所补充的电量就会越多,相应电池电量下降速度就越慢。这表明在本文控制策略下,电池电量下降速度更低,与原始控制策略相比,可以提高电池的续航时间,进而减少电池的充放电次数,提高电池使用寿命。

图11 电池电流对比
以上分析表明,本文所设计的控制策略可使汽车具有更高的电机制动力占比和更大的充电电流,而这两者会使电池SOC下降更加缓慢,进而增大汽车续航里程。
3.2.3 电池SOC对比
如图12所示,为电池SOC在各工况下的变化过程。图12显示:随着时间的推移,电池SOC值总体上呈现逐渐降低的趋势,但有些地方出现了小幅的升高,这表示此时制动能量正在被回收。在两种工况下,采用本文控制策略的纯电动汽车其SOC值降低幅度均小于采用ADVISOR自带控制策略的汽车。在NEDC工况下,使用ADVISOR自带控制策略进行一个工况循环后,SOC值为0.974 9;使用本文控制策略进行一个工况循环后SOC值为0.975 7,提高了0.08%。在FTP75工况下,使用ADVISOR自带控制策略的SOC值为0.955 8;使用本文控制策略的SOC值为0.958 8,提高了0.3%。
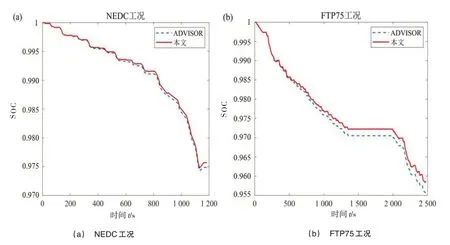
图12 SOC对比
值得注意的是:NEDC工况一个循环全长为10.93 km,持续时间为1 184 s;FTP75工况一个循环全长为19.77 km,持续时间为2 277 s。单个工况循环的时间和行驶里程数都较短,因此,相应SOC值提高幅度并不是很大;但若考虑到汽车的整个续航里程,相应的改善程度就会较为显著。作为验证,以下将对两种控制策略下的续航里程进行对比。
3.2.4 续航里程对比
如图13所示,为续航里程在各工况下仿真的变化过程。图13显示:在本文控制策略下,两个工况的续航里程均大于采用ADVISOR自带控制策略下的续航里程。在NEDC工况下,原始控制策略续航里程为326.2 km,本文控制策略续航里程为348.5 km,提高了6.84%;在PTF75工况下,原始控制策略续航里程为302.8 km,本文控制策略续航里程为334.2 km,提高了10.37%。续航里程的提升,主要是由于电机制动力占比增大,从而提高了制动能量的回收效率。

图13 续航里程对比
3.2.5整车能量效率对比
整车能量效率也是评价制动能量回收的重要指标之一。如图14所示,为不同工况下两种控制策略的整车能量效率的对比结果。图14显示:在两种工况下,使用本文控制策略的整车能量效率均大于ADVISOR原始控制策略下的整车能量效率。本文控制策略的整车能量效率在NEDC工况下,比原始控制策略高3.5%;在FTP75工况下,比原始控制策略高6.8%。
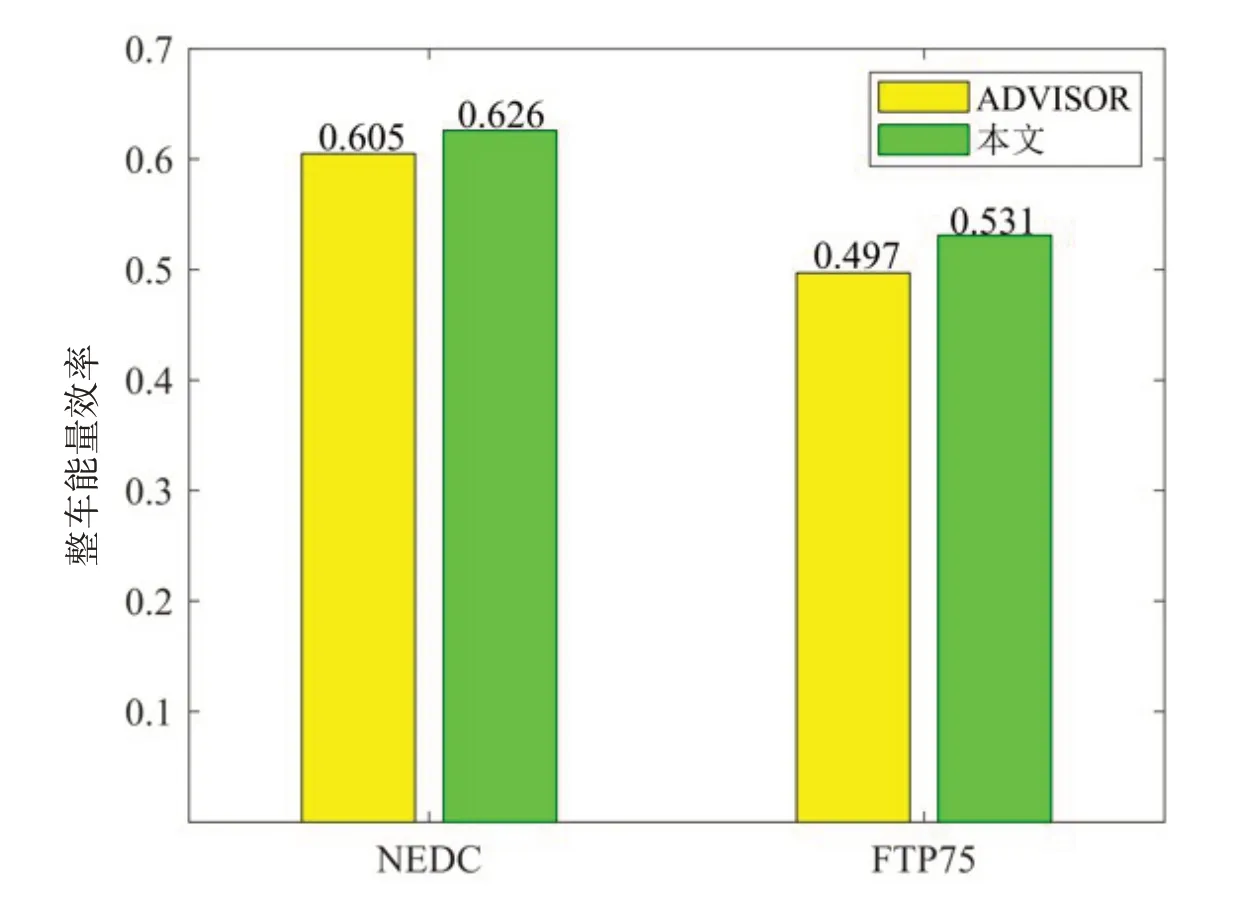
图14 整车能量效率对比
4 结语
本文以后驱纯电动汽车为研究对象,对纯电动汽车的制动能量回收策略进行研究。基于模糊控制策略设计能量回收策略,以电池SOC和车速v为输入变量,以电机制动力占比K为输出变量设计模糊控制器,对制动力进行合理分配;并通过ADVISOR软件进行仿真分析,在NEDC和FTP75工况下,将ADVISOR自带控制策略与所设计控制策略的电机扭矩、电池电流、电池SOC、续航里程以及整车能量效率进行对比。仿真结果表明,本文提出的制动能量回收策略,能够有效提高纯电动汽车的续航里程和能量利用率。
猜你喜欢
车主之友(2022年6期)2023-01-30
车主之友(2022年4期)2022-08-27
汽车实用技术(2022年14期)2022-07-30
今日农业(2021年7期)2021-11-27
当代陕西(2019年15期)2019-09-02
文苑(2018年23期)2018-12-14
环境与生活(2018年5期)2018-09-10
中国宝玉石(2018年6期)2018-03-05
车迷(2017年12期)2018-01-18
中共南昌市委党校学报(2017年1期)2017-05-04