基于FFT-1D-CNN的细纱机罗拉轴承故障诊断
2023-01-31 05:39陈宇航李正平
棉纺织技术 2023年1期
陈宇航 李正平 肖 雷
(东华大学,上海,201620)
罗拉轴承是用于支撑细纱机上罗拉旋转的部件,但因装配不当、密封性差、工作面间相对运动等影响,长期使用后易发生故障。若在罗拉轴承出现故障后未能及时处理,轻则影响纺纱质量,如常见的条干不匀率和锭差[1];重则严重影响生产效率。
由于产品牵伸倍数的需求,细纱机罗拉轴承经常呈现变转速运行的状态。相比于稳态运行,在变转速状态下,罗拉轴承更易发生故障,而且故障特征频率会发生漂移,加大了故障诊断的难度。因此,实现变转速下工作的罗拉轴承故障诊断更有现实意义。
细纱机罗拉轴承多为滚动轴承,目前针对滚动轴承的故障检测主要是对内圈、外圈、滚动体和保持架上的故障进行基于特征频率的故障识别。但是对于纺纱机械中因纱线细小、轴承密封性差而造成的纱线或纱线毛羽卡入轴承,与轴承内圈、滚动体缠绕(以下简称卡纱线),该故障现象在将滚动体拆卸后可较为明显地观察到;因保持架制造精度低、轴承受偏载而出现的滚针偏斜;因装配不精细产生的滚针缺失等故障模式缺乏相关机理研究,这也给基于故障机理和信号处理的细纱机罗拉轴承故障诊断带来一定难度。
近年来,深度学习发展迅猛,其中卷积神经网络(CNN)比较具有代表性。CNN主要被用来处理二维图像。由于其强大的认知计算能力,近年来也被引入到机械故障诊断领域。CNN能很好地表征信号与机械健康状态之间复杂的映射关系,能提升对于非线性高维健康监测数据的诊断分析能力[2-5]。
在基于CNN解决变工况滚动轴承故障诊断方面,文献[6]通过对信号进行短时傅里叶变换得到时频谱并将时频谱作为CNN的输入。文献[7]通过离散小波变换自适应提取时频域特征并使用CNN对该特征自学习。文献[8]提出了一种融合小波变换和多模态注意力CNN的故障诊断方法。上述文献中,选用的CNN模型大多是二维CNN(2D-CNN),输入为二维图片。然而,通过传感器采集的设备状态监测信号大多是一维信号。若采用传统的2D-CNN,则需将一维的原始状态监测信号处理为二维图片。此过程可能会丢失原始信号中部分与设备状态以及设备故障相关的信息,还会消耗更多的计算机内存。此外,相较2DCNN,一维CNN(1D-CNN)结构更为轻量化,便于实现端到端的故障诊断。
近年来也有学者运用1D-CNN进行故障诊断。文献[9]将振动信号输入1D-CNN提取多维特征,通过注意力模块对特征赋予不同的权重,该方法在变负载工况下也有较好的泛化性能。文献[10]引入通道注意力网络提升1D-CNN对通道特征的敏感性,并结合联合分布最优传输进行了滚动轴承变工况下的故障诊断研究。
本研究提出了一种针对变转速运行的细纱机罗拉轴承故障诊断方法。该方法通过快速傅里叶变换(FFT)将测得的细纱机罗拉轴承振动加速度信号转化成频域信号,并输入到1D-CNN中快速提取特征进行故障诊断,诊断过程无需手工提取特征,避免了传统方法主要依赖专家经验知识的不足,准确率较高。
1 本研究提出的故障诊断方法
首先将采集到的细纱机罗拉轴承一维振动加速度信号经FFT转化成一维频域信号;再将频域信号划分为训练集、验证集、测试集;然后使用训练集、验证集训练1D-CNN,并保存训练好的模型参数;最后将测试集输入到训练好的模型中以获得故障诊断结果。
1.1 FFT
滚动轴承的故障振动信号通常具有比较显著的幅频特性,使用频域分析方法更为有效[11]。FFT能够快速实现信号从时域向频域的变换,是目前工业界解决设备故障诊断问题中最常用的方法之一。由于采集到的状态监测信号具有离散特性,采用离散傅里叶变换(Discrete Fourier Transform,DFT)对采集到的信号进行处理。有限长离散信号x(n)的DFT计算公式如式(1)所示。

式中:k=0,1,…,N-1;e为自然对数的底数;i为 虚 数 单 位;N为 抽 样 点 数;n=0,1,…,N-1。
1.2 1D-CNN的构造及参数设置
本研究所采用的1D-CNN以一维信号作为输入,能避免部分信息的丢失,使网络结构轻量化,降低计算机的存储成本。1D-CNN结构如图1所示,包括了输入层、卷积层、池化层、全连接层、输出层、批归一化层和丢弃层。其中卷积层和池化层交替出现若干次进行特征提取。

图1 本研究所构建的1D-CNN结构示意图
在卷积层中,卷积核通过一组权重对前一层的输出特征进行卷积操作,再通过激活函数来获得输出特征。卷积操作的公式如式(2)所示。

式中:yl-1h表示所构建的1D-CNN的第l-1层的第h个特征图;ylj表示第l层的第j个特征图;Mj表示来自上一层的输入特征图集合;ωlhj表示卷积核的权值矩阵;alj表示偏置;*表示卷积运算;f(·)表示激活函数。
池化层能在保留主要特征的同时减少参数量,并能抑制过拟合。池化方式主要有最大池化和平均池化等。平均池化能保留更多的背景信息,而最大池化则能保留更多的纹理及边缘信息。由于本研究输入为一维信号,并没有图片中的背景信息,且为保留更多的边缘信息采用了最大池化,计算公式如式(3)所示。

式中:H(·)表示降采样函数;βlj表示第l层的第j个特征图的降采样参数。
全连接层将网络学习到的分布式特征映射到样本空间,起到分类器的作用。批归一化层对数据进行批量归一化,加快网络训练速度。丢弃层用于防止过拟合。
在语言学中,会涉及到“迁移”一词。对于语言学习而言,迁移即在掌握某种语言过后,学习另一种语言时会先入为主的运用已有语言运用的语调、发音等进行新的学习,从而出现口音有部分重合的现象。在本次论文研究中,迁移即方言在学习普通话中的影响力。在居民从掌握的方言到普通话后来逐渐运用到语言的习得中,表示一种语言对另一种语言的学习过程及结果产生的影响。
本研究所用的1D-CNN的详细架构及参数如表1所示。

表1 本研究中的1D-CNN的详细架构
网络相关参数设置:该网络共计17层,批大小为64,学习率为0.000 1,迭代次数为100。本研究引入“早停”机制,即设定连续10次迭代损失函数的值不下降时停止模型训练,以防止过拟合。由于细纱机罗拉轴承故障诊断属于多分类问题,所以本模型选用交叉熵损失函数。选用Adam优化器,收敛速度更快,学习效果更好。试验平台配置:Windows 11的64位操作系统,CPU为i7-11800H @ 2.30GHz,GPU为NVIDIA Ge-Force RTX 3050。
2 数据采集与方法验证
本研究为证明所提方法的有效性,采用生产实际中的故障罗拉轴承安装在细纱机小样机上进行试验,通过测得的振动数据进行验证。
2.1 试验数据集
细纱机故障轴承数据采集试验如图2所示,由细纱机小样机、数据采集仪、振动传感器及电脑组成。通过数据采集仪将吸附于罗拉轴承座上的振动传感器采集到的振动信号实时传输到电脑,采样频率为20.48 kHz,即每秒从输入信号中提取并组成离散信号的采样点数为20 480个。振动传感器在罗拉轴承座上的安装状态如图3所示。该传感器可测得三向振动加速度信号。有理论和实践证明,许多故障信息都显现或隐含在径向振动信号中[12],故本研究选择径向振动信号进行分析。
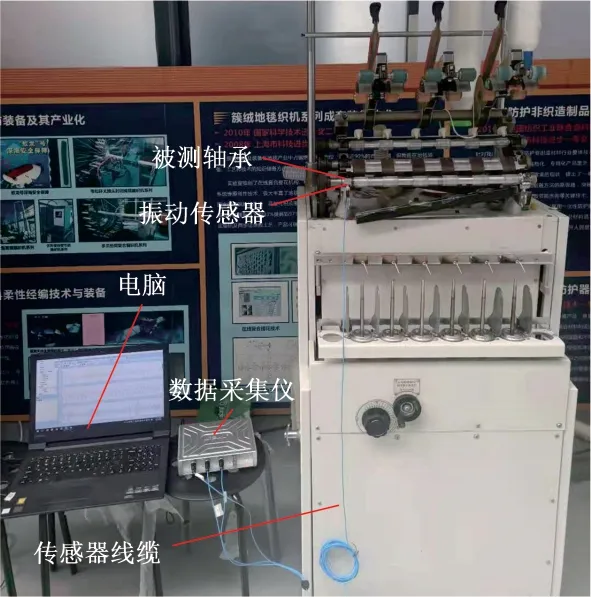
图2 细纱机试验台

图3 振动传感器在罗拉轴承座上的安装状态
本试验采集了4种不同健康状态(滚针缺失、卡纱线、滚针偏斜以及正常)的罗拉轴承在细纱机小样机上的振动加速度信号,包括4个滚针缺失轴承、2个卡纱线轴承、3个滚针偏斜轴承、1个正常轴承,这4种不同健康状态的轴承如图4所示。

图4 4种不同健康状态的罗拉轴承
受所纺纱线种类影响,细纱机罗拉轴承变转速运行。本试验用到的细纱机小样机罗拉转速范围为30 r/min~350 r/min。试验中对上述每个轴承都在30 r/min、57 r/min、100 r/min、173 r/min、200 r/min、269 r/min、300 r/min、350 r/min转速下采集状态监测数据用于训练、验证和测试。每个轴承每种转速下采样1次,每次采样持续时间为60 s。单次采集的状态监测数据视作一个样本,10个轴承8种转速总计80个样本。由于数据量相对较少模型易过拟合,采用滑动窗对样本量进行扩充,如图5所示。样本量扩充前后数据量对比如表2所示。经扩充,每个样本可生成40个子样本,每个窗内包含40 960个采样点。每个窗内包含的采样点个数,即窗口长度,通过式(4)确定。窗口滑动的步长L通过式(5)确定。
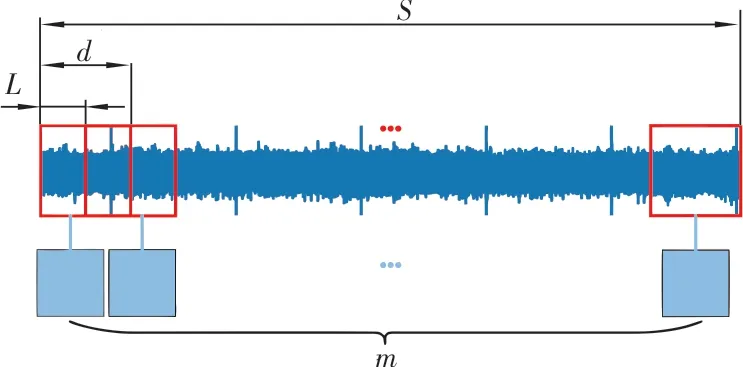
图5 滑动窗口获取子样本示意图

表2 样本扩充前后数据量对比


式中:S为每个样本中的数据量;d为窗口长度;m为从每个样本中获得的子样本数。
因细纱机罗拉轴承变转速运行,为保证各个转速下窗内的数据均涵盖轴承至少旋转一周的状态监测数据,本研究将R设置为其最低转速,在本试验中为30 r/min。。
获得子样本之后,对其进行划分。将转速为30 r/min、100 r/min、200 r/min、300 r/min、350 r/min的样本用于构造训练集及验证集,随机提取这5种转速下80%的数据用作训练集,剩余20%的数据则为验证集。转速为57 r/min、173 r/min、269 r/min的数据为测试集,以此实现对于变转速下的罗拉轴承故障诊断。
图6和图7为样本扩充后细纱机转速为350 r/min下的4种不同健康状态罗拉轴承的时域、频域信号经归一化后的结果。
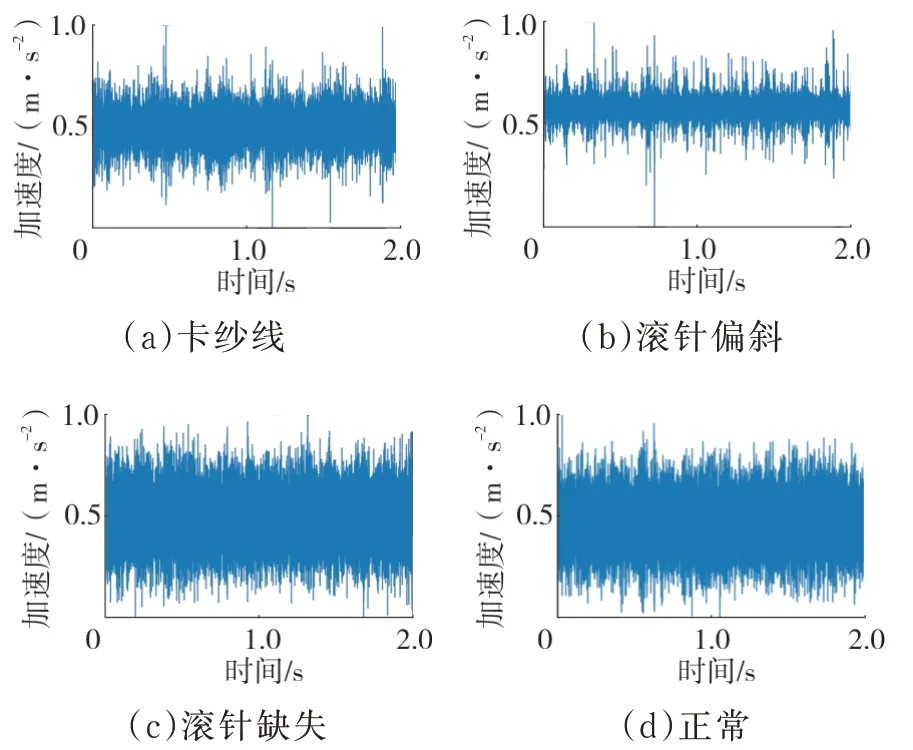
图6 4种不同健康状态的罗拉轴承的时域信号图

图7 4种不同健康状态的罗拉轴承的频域信号图
从图6中观察到,滚针缺失与健康状态正常的轴承的状态监测信号在时域上无明显区别,幅值主要集中在0 m/s2~0.8 m/s2之间;卡纱线的轴承状态监测信号在时域上幅值主要集中在0.2 m/s2~0.8 m/s2之间;滚针偏斜的轴承的状态监测信号的幅值则主要集中在0.4 m/s2~0.8 m/s2之间。从图7中观察到,卡纱线与滚针偏斜的轴承频域信号图形状类似,滚针缺失与正常的轴承频域信号图形状类似;但卡纱线的罗拉轴承频域图形中,峰之间的距离相近。滚针偏斜的罗拉轴承在0.5 kHz和2 kHz左右有明显的峰值积聚,滚针缺失和正常的罗拉轴承则都在2 kHz和4 kHz左右有明显的峰值积聚。但因缺乏卡纱线等相关故障机理研究,无法仅依靠频域信号判定罗拉轴承存在何种故障。因此,本研究将FFT与1D-CNN相结合进行罗拉轴承故障诊断。所采用的1D-CNN的构造及参数设置见1.2节。
2.2 试验结果
试验训练、验证及测试的准确率如图8所示。其中,验证集准确率达到100%,测试集的准确率也接近100%,且只需不到10次迭代就能获得较高的准确率,但训练集的准确率较低,在95%左右。这是由于添加了丢弃层。训练时,丢弃层随机丢弃部分神经元使得只有部分特征检测器参与训练,造成训练集准确率较低;验证及测试时丢弃层自动关闭,所有特征检测器共同使用,取得了准确率较高的效果。

图8 模型训练、验证、测试准确率
对在测试集上的故障诊断结果绘制混淆矩阵,如图9所示。由图9可见,本研究提出的方法对于卡纱线、正常及滚针偏斜的轴承分类准确率都为100%,仅在滚针缺失轴承上出现1例分类错误的情况,分类准确率也高达99.792%。

图9 测试集故障诊断效果混淆矩阵图
为比较不同的信号分析方法对罗拉轴承故障诊断的影响,选取4种信号分析方法进行对比试验。常用的信号分析方法包括时域、频域和时频域分析。其中时频分析方法需要将一维时域信号转化为二维时频图片,不适于作为1D-CNN的输入。而滚动轴承的故障振动信号的幅频特性比较显著,使用频域分析方法更为有效,常用频域分析方法包括包络谱(Envelope Spectrum,ES)、倒频谱(Cepstrum,CEPS)、功率谱(Power Spectrum, PS)等。为验证经FFT后的频域信号直接作为输入时,可以避免特征提取导致丢失有用信息以及基于滚动轴承的幅频特性更显著的特点,将其与原始时域(Time Domain, TD)信号以及经ES、CEPS、PS分析后的信号分别输入1.2节中所述1D-CNN进行对比试验。试验结果如图10所示。

图10 不同特征提取方法准确率和损失值的比较
由图10(a)可以观察到,经FFT得到的频域信号作为模型输入时,其准确率明显高于其他4种信号分析方法。由图10(b)可以观察到,以FFT得到的频域信号作为模型输入时,经20次迭代后验证集上的损失值已接近于0,以时域信号作为输入时则需要约30次迭代,其他3种方法则在模型训练结束时损失值仍在0.1左右。从诊断的准确率和模型收敛效果来看,使用经FFT得到的频域信号作为模型输入比其他方法更优越。
支持向量机(SVM)、随机森林、决策树、K-近邻(KNN)、极限学习机(ELM)这5种机器学习分类模型被广泛应用于轴承故障诊断领域,本研究在输入均为经FFT得到的频域信号的情况下,将所提方法与上述5种模型进行对比。为避免偶然性,每个模型均进行3次试验取平均值。各模型的诊断结果如表3所示。可以看出,本研究所提出的1D-CNN平均准确率高达99.917%,明显优于其他5种方法。虽然在运行时间上该方法比上述5种方法耗时多,但仍满足企业端到端的诊断需求。
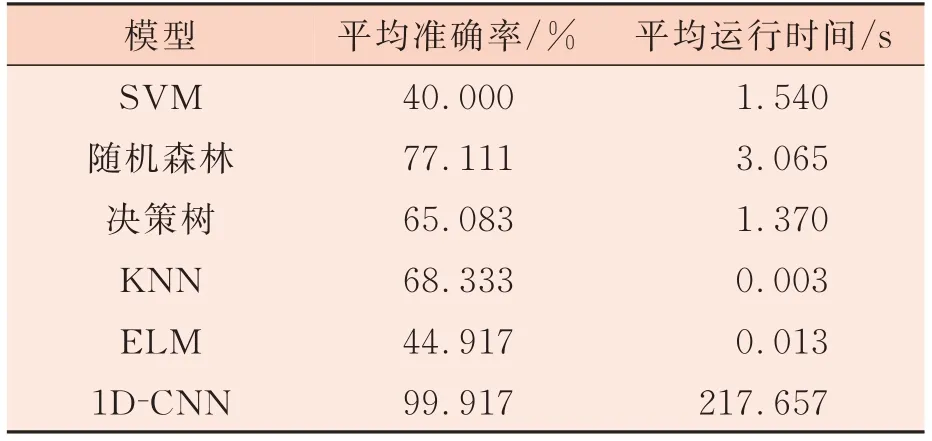
表3 不同诊断模型结果对比表
3 结论
本研究提出的基于FFT-1D-CNN的变转速下细纱机罗拉轴承智能故障诊断方法以频域信号直接作为故障诊断识别的依据是可行且有效的,且可以避免人工提取特征造成的部分与故障相关的信息丢失、故障诊断准确率低的不足;1D-CNN能直接利用一维信号作为输入,体现了较强的特征提取和识别能力。该方法在诊断准确率上高达99.917%,诊断耗时满足工业需求。下一步将深入研究故障程度更小时的高准确度诊断,以便为制定维护行为赢得更多时间。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
棉纺织技术(2022年10期)2022-11-21
小哥白尼·野生动物画报(2021年6期)2021-07-14
广西文学(2020年8期)2020-08-04
数学大王·趣味逻辑(2019年10期)2019-11-06
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
广州文艺(2017年8期)2017-09-13
火控雷达技术(2016年1期)2016-02-06
现代纺织技术(2015年6期)2015-02-28