对干涉仪干扰机理的研究*
2023-02-01 12:23王磊王洪迅林鑫淼王洪雷陈侃孟涛
现代防御技术 2023年6期
王磊 ,王洪迅 ,林鑫淼 ,王洪雷 ,陈侃 ,孟涛
(1.空军工程大学 航空工程学院,陕西 西安 710038;2.中国人民解放军93149 部队,甘肃 酒泉 735000;3.中国电子科技集团公司第二十九研究所,四川 成都 611730)
0 引言
在现代战争的复杂电磁场环境下,电子侦察已成为必然要求,其目的是夺取战场的电磁优势和信息优势,追求制电磁权和制信息权,从而引导战斗取得胜利[1-2]。在电子侦察中,测向是极为重要的侦察资源,可以获取射频目标的来波方向(angle of arrival,AOA)。传统测向大多采用干涉仪测向、比幅测向与和差波束测向[3],其中测角精度高、处理速度快的多基线相位干涉仪(multi-base-line interferometer,MBI)测向[4]是现今各类无源测向系统的首选。相应地,为了降低敌方电子侦察系统效能,对MBI 接收机的干扰就具有十分重要的军事价值。
传统的MBI 接收机有一个局限是只能正确响应一个信号,若有2 个信号或多个信号同时出现,就很难准确测量AOA[5-6]。因此,本文针对MBI 接收机这一特点,从原理上研究对干涉仪的干扰机理,分析多信号交叠情况对传统干涉仪的影响,并通过仿真模拟进行效果评估。
1 干涉仪测向原理
1.1 单基线相位干涉仪测向原理
单基线干涉仪的测向原理[1,3]如图1 所示。2 个天线之间的距离,即基线长度为l,波长为λ的信号入射角为θ。单基线干涉仪测向是通过求得2 路信号的相位差φ,进而得到入射角θ的值。
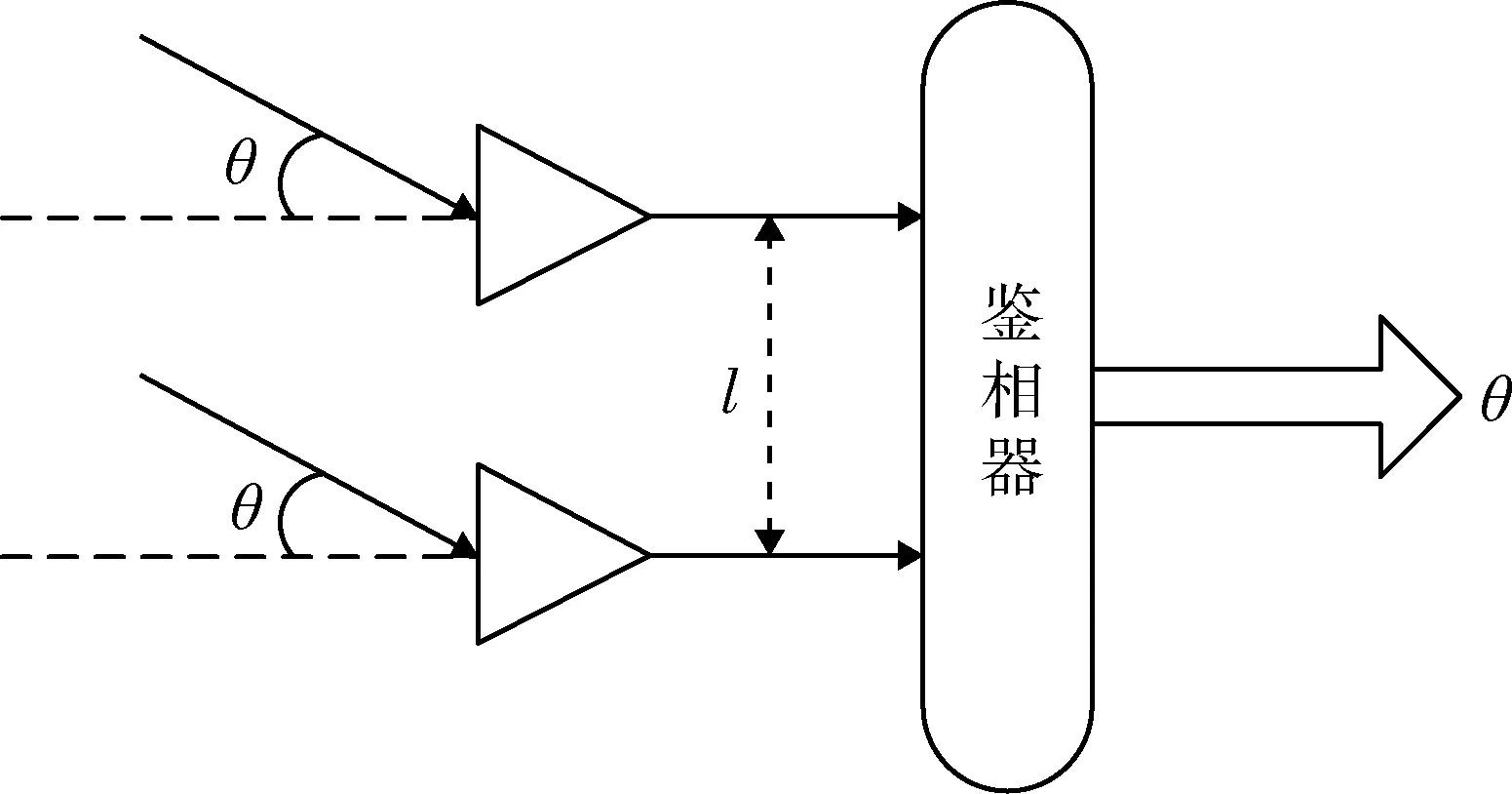
图1 单基线干涉仪示意图Fig.1 Single baseline interferometer
当侦察目标到天线口面的距离远大于基线长度时,可将入射波等效为平行波,则得到2 个天线的信号波程差,因此,到2 个天线的信号相位差为
所以,若已知基线长度为l,只要测得相位差φ和信号波长λ即可得到入射角θ,即
1.2 干涉仪鉴相原理
干涉仪多采取模拟鉴相法测向[7],其核心器件为由功分器、耦合器以及检波器等元器件组成的微波鉴相器,如图2 所示。
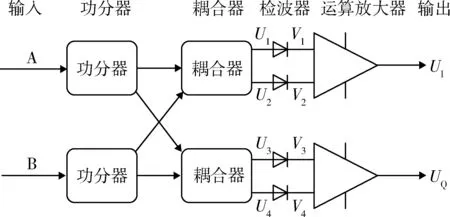
图2 模拟法相位提取原理示意图Fig.2 Phase extraction principle by simulation
干涉仪的两个天线馈入信号分别为
式中:A0为信号幅度;φ为两通道间的相位差;f为信号频率。经过功分器、耦合器便可得到式(4)[7]。
检波器的输入功率与输出电压满足V=ηP,所以经过检波器后电压为
将上述公式转换并消去常量可得
所以相位差为
假设λ为目标信号波长,l为基线长度,对应测量出的目标信号角度θ为
根据上述公式,便可从理论上通过模拟法提取相位差求得目标角度。
1.3 多基线数字相位干涉仪系统
工程中实际采用的干涉仪,全称为“多基线相位干涉仪”,这种MBI 测向接收机的特点为:
(1)多基线并联结构;
(2)相位量化编码,输出数字方位结果;
(3)同时信号到达指示,满足实用需求。
1.3.1 多基线并联
一维MBI 测向接收机测向相较于单基线干涉仪测向,拥有更高的精度和解模糊能力。其原理为同一直线上有多个天线接收信号,通过测量两两天线之间的相位差来确定方向,原理图如图3 所示(以一维三基线相位干涉仪为例)。
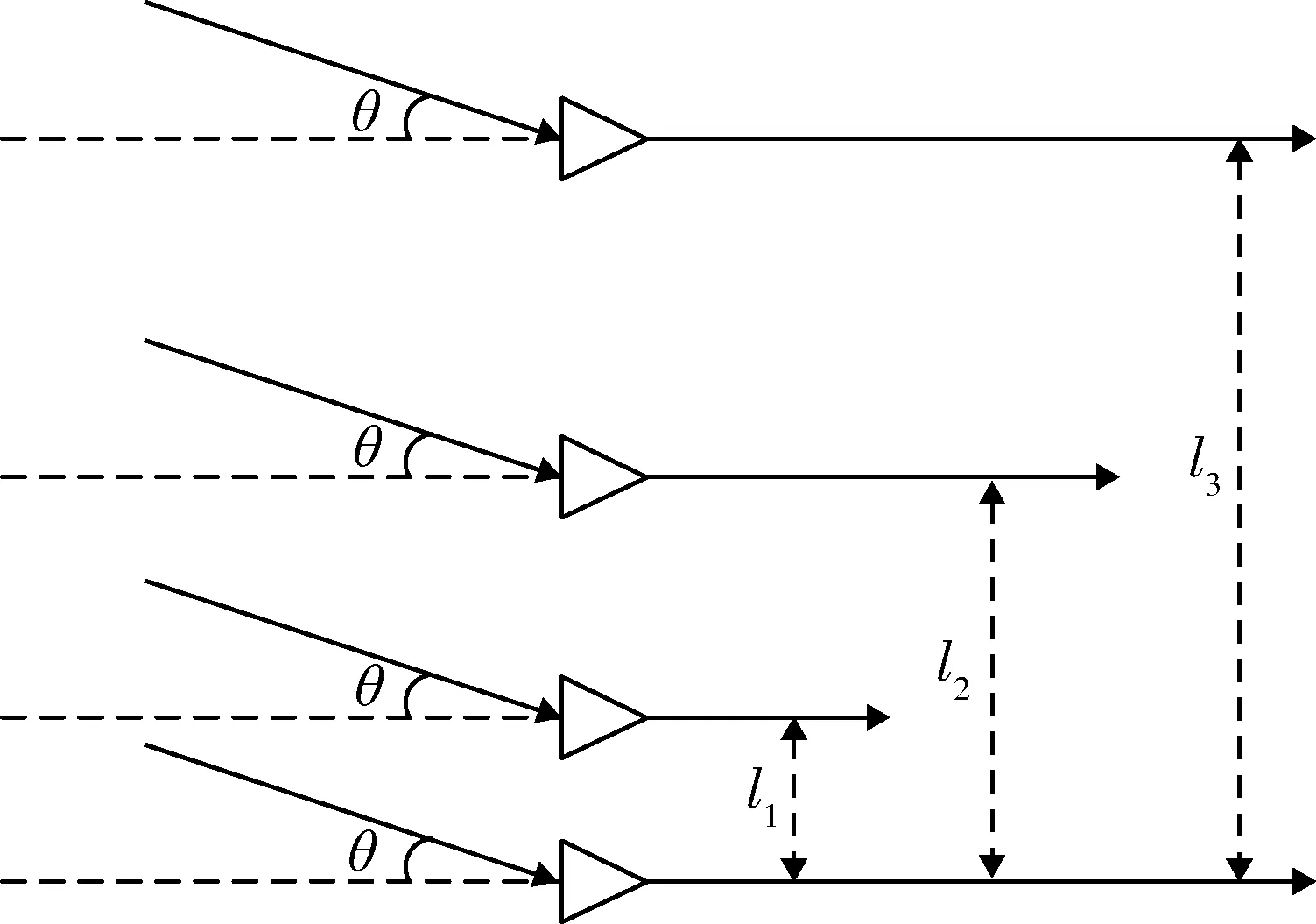
图3 一维三基线干涉仪示意图Fig.3 One-dimensional three-baseline interferometer
由于信号到达各天线间存在波程差,因而形成的相位差分别为
式中:λ为信号波长;l为天线之间距离。
根据式(9),对于一定的基线长度l,只要得到任意一个相位差φ,就能计算出信号的到达方向角。其实际电路结构如图4 所示。为了使得各通道上信号相移满足一定的关系,各天线与基准天线之间的距离也需要满足一定的关系,这样相邻基线对应的测向通道可以对测量数据进行矫正。
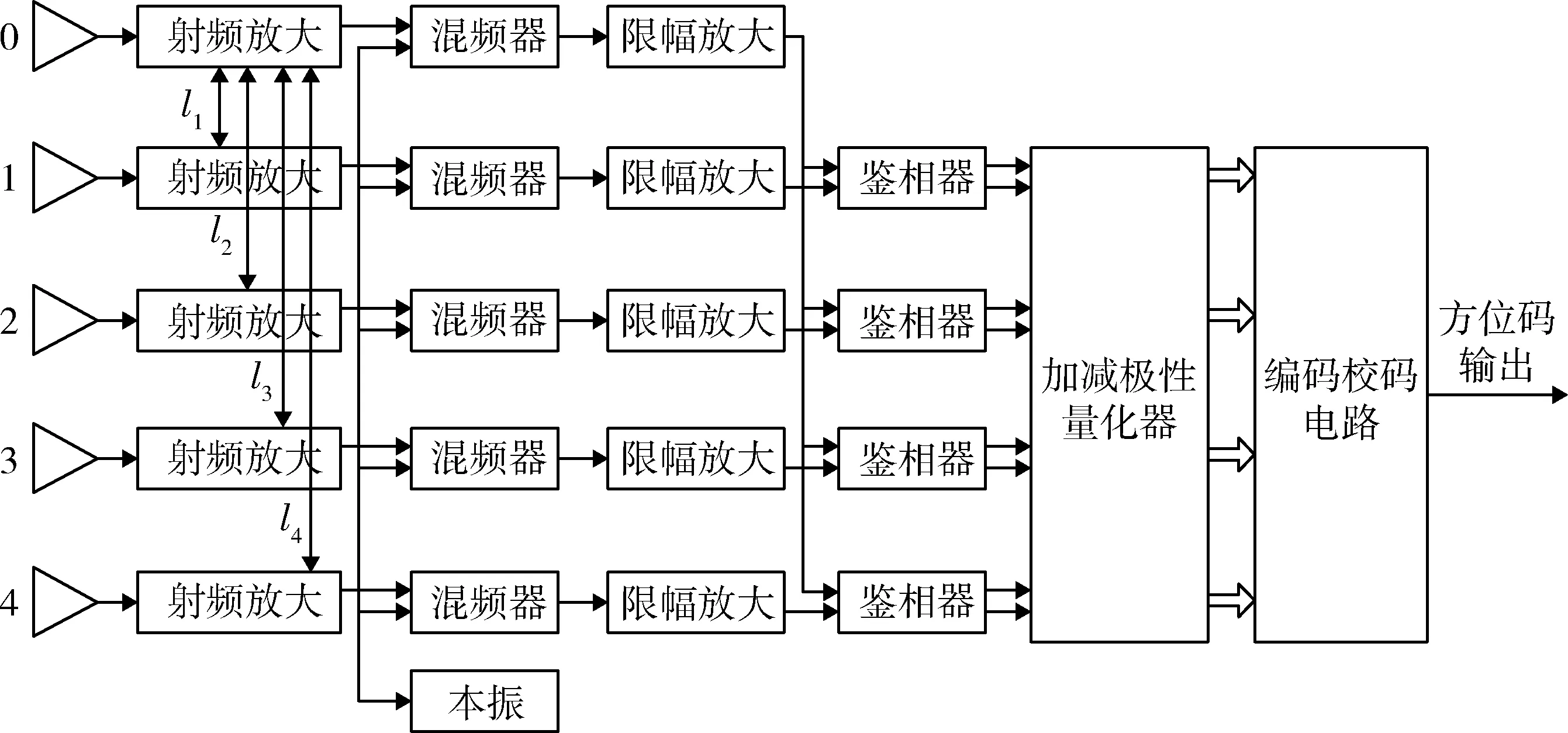
图4 多基线并联结构Fig.4 Parallel structure of multiple baselines
采用这种多基线并联结构之后,MBI 接收机中的短基线保证相位干涉仪测向范围,长基线保证相位干涉仪测向精度[8]。典型相位干涉仪测向系统覆盖范围约为±60°,测向精度可达0.01°。
1.3.2 相位量化编码
传统解模糊的方法有余数定理法、虚拟基线法、长短基线法等,其基本思想是找出多基线相位干涉仪阵列中阵元基线长度的线性组合,使其满足小于辐射信号半波长的条件,以此来进行解模糊[8],结合数理统计进行计算,将会得到较高的精确度[9]。本文MBI 接收机采用相位量化编码解模糊。
以短基线为例,采用3 bit 相位编码对鉴相模块通道的输出值进行编码[10],如图5 所示。假设其不模糊覆盖方向区间为±90°,3 bit 量化将该不模糊区间均分为8 个区间,依次编码000,001,010,011,100,101,110,111。

图5 各通道相位编码Fig.5 Phase coding of each channel
若相邻基线长度之比为2,最短1 倍基线对应的不模糊区域为±90°,可知2 倍基线对应的不模糊区域±45°,4 倍基线的不模糊区域±22.5°,后续以此类推;且各通道不模糊区域之外的区域模糊,如图6,7仿真例所示。其中每个通道都是3 bit 编码量化且均分为8 个区间;1,2,4,8,16 倍基线对应测向通道的量化区间分别为22.5°,11.25°,5.625°,2.812 5°,1.437 5°,量化如图8 所示。
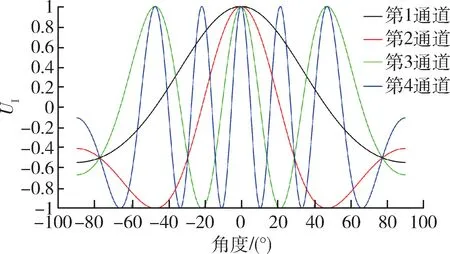
图6 4 个通道输出UI曲线Fig.6 UI curves output by four channels

图7 4 个通道输出UQ曲线Fig.7 UQ curves output by four channels
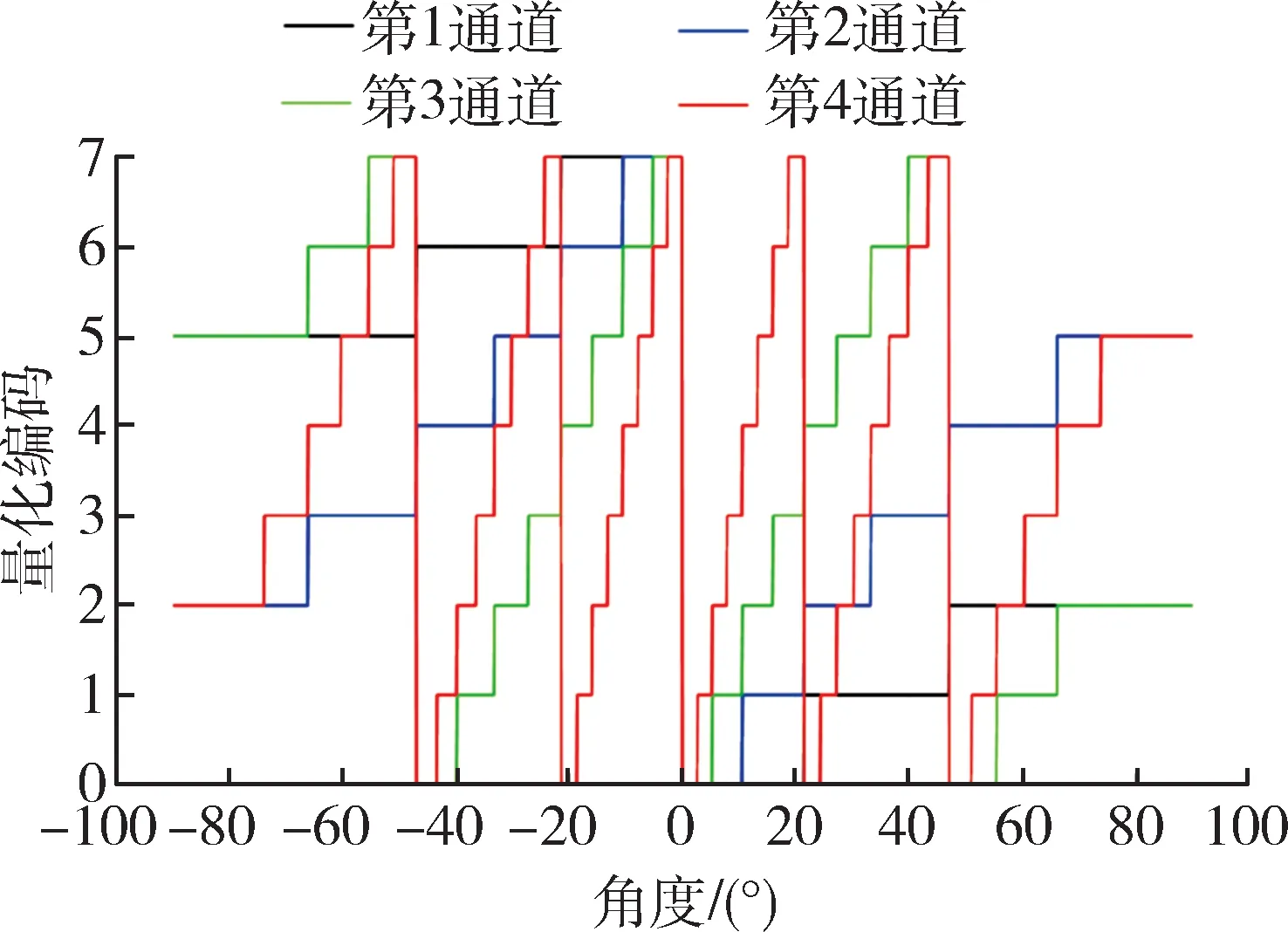
图8 相位量化编码示意图Fig.8 Phase quantization coding
当某一外来射频信号存在的情况下,4 个通道共输出4 组3 位相位编码二进制数。将其按序排列并前后校正,即可得到干涉仪测得方位二进制码值。本文干涉仪测向的方位编码是通过遍历法[6]所得理论值。根据编码和解码规则,可见本文的干涉仪测向,其测向覆盖范围由短基线决定,覆盖区域±90°;测向精度由长基线所决定,由前述分析可知精度约为1°。若量化编码更加细化,或并联更多测向通道,可进一步提高测向精度。
1.3.3 同时到达信号的检测与指示
MBI 接收机测向对多信号处理能力较弱,所以往往设置同时到达信号检测与指示电路,其逻辑如图9 所示。

图9 同时到达信号检测电路逻辑Fig.9 Circuit logic of simultaneous arrive signal detection
图9 中,若某一时刻电路的输入仅存在1 个信号,则该信号经延迟相乘,因同频同相,则再经滤波和检波就无信号指示;若该时刻存在不少于1 个信号,通常这些信号异频异相,经延迟相乘和滤波,就会有交调信号存在,最后经检波和门限,输出同时到达信号标志,指示测向值错误不可用。
本文仅描述其行为逻辑,并假设若存在同时到达信号,则电路输出为1;若没有同时到达信号,则电路输出为0,如式(10)所示。
根据式(10),只有单一信号作用于干涉仪的情况下,干涉仪测向输出的角度编码才是无错误的测向值,这种情况下其输出指示为0。
2 对MBI 接收机的干扰机理
MBI 接收机是现代电子侦察的关键部件,对其实施干扰,可以大大降低电子侦察的测向效能。本小节对MBI 接收机的干扰机理进行研究。
2.1 干扰策略
传统MBI 接收机可以高精度响应一个信号的方位,但若存在2 个或更多个信号同时作用,MBI 接收机就很难准确测量。因此对MBI 接收机测向干扰的策略就是:对MBI 接收机构建同时到达多个信号的环境,达到对其干扰的目的。当多个射频信号同时作用于MBI 接收机,期望效果如下:
(1)同时检测信号电路将会发出“信号同时到达”指示,意味着对应时刻MBI 接收机输出的AOA测向数值不准确。
(2)多个信号作用于相位干涉仪测向的微波鉴相器,使其输出错误的UI,UQ信号,进而影响其相位编码电路,输出错误的测向结果。
虽然上述定性分析符合逻辑,但是干扰效能如何还需要定量分析。后续从理论分析和仿真2 个方面去论证对MBI 接收机的干扰机理。
2.2 MBI 接收机鉴相器的响应特性
在现有研究中,对干涉仪测向多信号同时到达信号的处理多为定性分析,王洪迅等[11]研究了鉴相器中双脉冲信号的定量处理,王士岩等[12]研究了鉴相器中对线性调频信号的定量处理,未见更多信号的作用分析。本文将其对双信号的处理方法应用于干涉仪,进行定量分析及公式推导。
2.2.1 同时到达2 个信号的情景
将微波鉴相器中处理双信号的定量分析应用于干涉仪测向,过程如下:
当两通道馈入2 个信号时,如式(11)所示。
式中:Ai为信号的幅度;φi为两通道间的相位差;fi为信号频率。
经过检波器后,UI_angle,UQ_angle输出为
2.2.2 同时到达3 个信号和n个信号的情景
以同时到达2 个信号的情景为基础,同2.2.1,当两通道馈入3 个信号时,如式(13)所示。
式中:Ai为信号的幅度;φi+1为第i+1 通道和第i+2 通道之间的相位差。
经过检波器后,UI_angle,UQ_angle输出为
那么同理可类比推理可以得知,存在n个信号时,UI_angle,UQ_angle输出为
2.3 多个信号与单一信号的作用效果对比
单一信号作用于MBI 测向接收机,其UI,UQ输出如式(6)所示,进而根据式(8)可以获得准确的信号角度测量值。然而根据前述MBI 接收机测向原理,多个信号同时作用于干涉仪测向系统,其UI(t),UQ(t)输出如式(15)所示。但是MBI 接收机对到达信号的计算规则不变,这种情况下微波鉴相器UI,UQ的比值为
多个信号作用下的式(15),与单个信号作用下的式(6)相比,同相、正交信号的表达式已经有了明显的差异。2 种情况下MBI 接收机测向都要依据式(8)获得信号的到达角DOA 值;但是多信号的情况下式(8)依据式(16)进行修正,得到另一个DOA 值。然而,这2 个角度值是明显不同的,这样就达到了干扰的效果。
2.4 同时到达信号指示电路的响应特性
若某一时刻环境中仅存在某一单一信号,或无信号,干涉仪的同时到达信号指示电路,输出无信号同时到达标志“0”,指示被测信号测向值正确。
若某一时刻环境中存在多个射频信号,无论是2 个还是更多,干涉仪的同时到达信号指示电路都将输出多个信号同时到达标志“1”,指示被测信号测向值错误。
3 仿真校验与评估
为了评估对相位干涉仪测向的干扰效果,依据上述理论分析和干扰策略创建仿真环境[13-14],对相位干涉仪测向进行干扰评估。
3.1 仿真环境假设
3.1.1 MBI 接收机测向系统
根据式(15)(8),在多同时到达信号情景下对干涉仪测向进行建模。
设干涉仪中最短基线长为0.025 m,其余依次为0.05,0.1,0.2,0.4 m,测向覆盖范围为±90°。
设干涉仪测向系统采样时间间隔为0.1 μs,总时长为50 μs。
由于式(6)是式(15)的特殊情况,因此上述也适用于对单一信号情景下的干涉仪测向建模。
3.1.2 信号条件
假设存在一个已知的雷达信号,其各项参数如表1 中的雷达信号所示。假设存在4 个已知的干扰信号,其各项参数如表1 所示。

表1 雷达与干扰信号相关参数Table 1 Related parameters of radar and jamming signals
为了贴合实际作战场景,对于干涉仪测向而言,仿真中还进行如下假设:
(1)4 个干扰信号脉宽不完全相同。但保证无论雷达信号是否存在,任意时刻至少存在2 个以上干扰信号。
(2)由于对于被保护的雷达信号而言,无法做到与其完全意义上的同步,因此假设其相对于干扰信号1 出现时间随机。
(3)以干涉仪为参考,雷达的DOA 值为-25°,所有干扰信号的DOA 值为30°,在干涉仪的覆盖范围之内。
3.1.3 信号的仿真特性
在表1 题设条件下(参数可根据实际需要进行修改调整),仿真生成的各脉冲信号如图10 所示,各脉冲信号幅度如图11 所示,满足题设条件。

图10 脉冲信号图Fig.10 Pulse signals
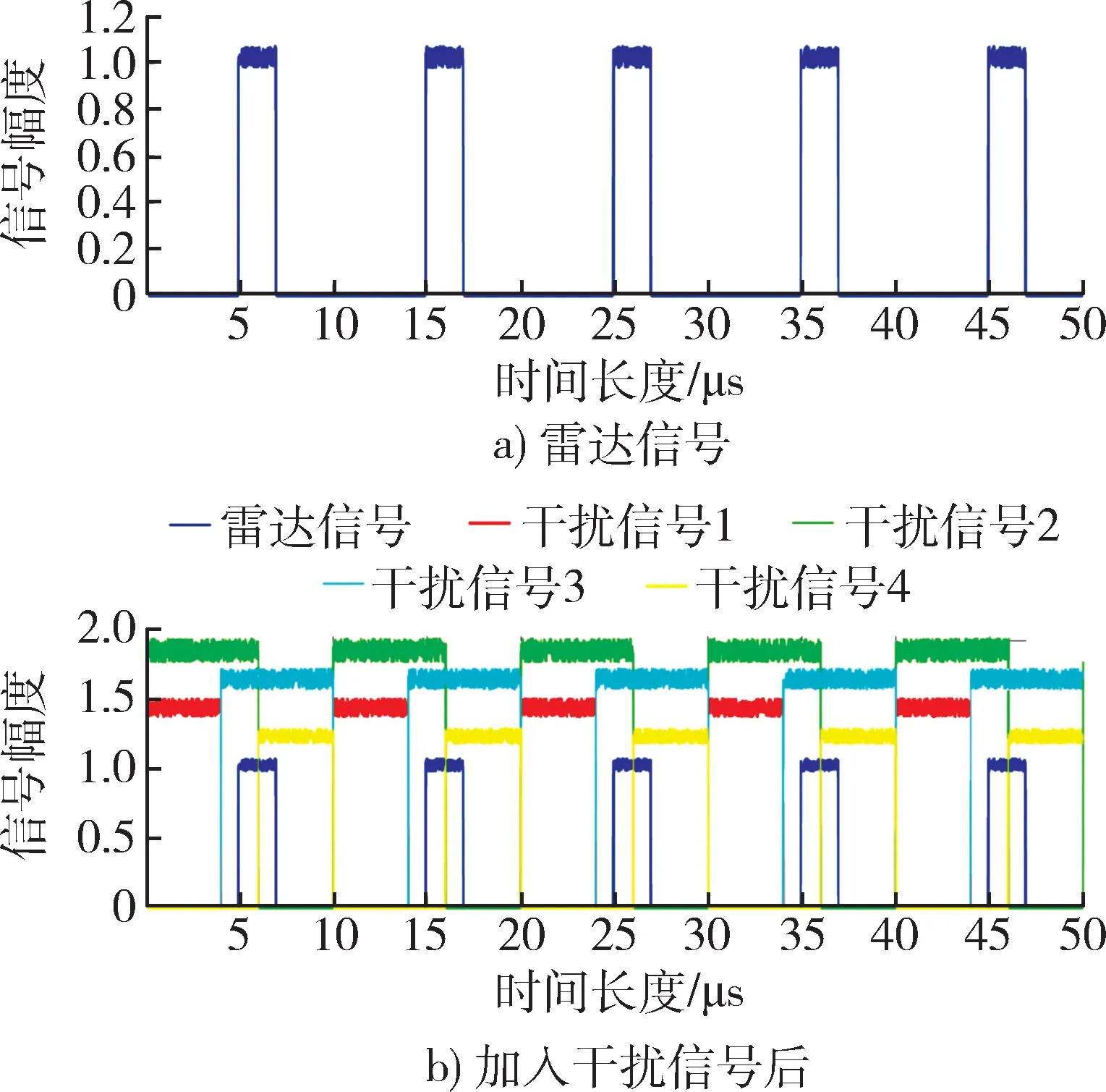
图11 雷达和4 个干扰信号幅度图Fig.11 Amplitudes of radar and four jamming signals
3.2 同时到达信号的响应特性
单独雷达信号作用于MBI 接收机,其同时到达信号指示的响应如图12 所示。可以看出这种情景下,同时信号检测指示输出值为0,表明此时间段不存在同时到达信号或没有信号到达,干涉仪测向正常。

图12 单独雷达的情景下同时到达信号指示Fig.12 Simultaneous arrival signals indication in scenario of single radar
多个干扰信号作用于MBI 接收机,其同时到达信号指示的响应如图13 所示。可以看出同时信号检测指示输出为1,表明此时间段均存在同时到达信号,因此测向数值存在错误。

图13 多干扰信号的情景下同时到达信号指示Fig.13 Simultaneous arrival signals indication in scenario of multi-jamming signals
3.3 微波鉴相器的响应特性
3.3.1 单独雷达的情景
单独雷达信号存在的情况下,雷达信号经过干涉仪测向系统后UI(t),UQ(t)输出如图14 所示。

图14 雷达信号各通道UI(t),UQ(t)输出值Fig.14 UI(t)and UQ(t)outputs in channels of radar signals
图14 是单一信号的情景下信号经过微波鉴相器后输出的UI(t),UQ(t)值,可见单一信号环境下(只存在雷达信号),干涉仪测向输出的UI(t),UQ(t)值较为稳定。
3.3.2 多干扰信号的情景
5 个交叠信号经过微波鉴相器后,UI(t),UQ(t)输出如图15 所示。

图15 5 个交叠信号各通道UI(t),UQ(t)输出值Fig.15 UI(t)and UQ(t)outputs in channels of five overlapping signals
由图14,15 可见,雷达信号UI(t),UQ(t)值与5个信号交叠时的UI(t),UQ(t)曲线明显不同,已经有了明显的干扰效果。
3.4 相位编码的响应特性
3.4.1 单独雷达的情景
只存在雷达信号的条件下,干涉仪测向I,Q 通道输出如图16 所示。此处需要说明的是,其中的AOA 值为-26°,而实际雷达信号AOA 为-25°,这是题设条件下相位量化间隔(1.437 5°,见图8)的影响,导致的测向误差。如若需要减小误差,则需细化相位量化间隔,间隔越小测量结果越精确。

图16 雷达信号的方位值Fig.16 Direction value of radar signals
3.4.2 多干扰信号的情景
加入干扰信号后,干涉仪测向I,Q 通道输出如图15 所示,这种情况下无法准确测得雷达信号的AOA。不仅如此,也根本无法获取雷达信号的到达时间,用于锁存测向数值。
然而,即便按最恶劣的情况估计,假设干涉仪仍然可以获得雷达信号的到达时间,这种条件下各通道相位编码输出特性将如图17 所示。

图17 加入干扰后的角度值Fig.17 Angle value after adding jamming
由图16,17 可见,对单一雷达信号测得的AOA值与对多干扰信号测得的AOA 值明显不同,且差异明显,说明有明显的干扰效果。
3.4.3 误差分析
将图16,17 进行对比,得到单独存在雷达信号时的雷达AOA 值与加入干扰后测得AOA 值的差值,如图18 所示。
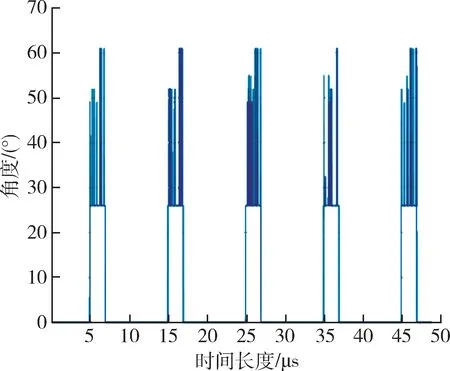
图18 雷达信号角度与加入干扰后角度的差值Fig.18 Angle difference between radar signal and radar signal with jammings
综上,可见此干扰策略在目标方位测量上可以对侦察机产生有效干扰,使其无法获得正确数值,说明可对侦察接收机造成有效的干扰。
3.5 仿真结论
上述仿真过程验证了多信号交叠对MBI 测向接收机的干扰机理,并可得到下述结论:
(1)图16 是对雷达信号单独进行方位测量的仿真结果,验证了MBI 测向接收机处理单一信号的测量机理。
(2)由图14,15 可见,单一雷达信号情景与干扰后信号通道输出的UI(t),UQ(t)值明显不同,且干扰后输出的UI(t),UQ(t)值无明显规律,根据相位干涉仪的测向机理计算,难以得到正确角度。
(3)由图16~18 可见,干扰后信号方位与雷达信号方位测量有明显差异,干扰后信号方位跳变严重,无法测取准确值,这说明产生了有效干扰。
4 结束语
本文在相位干涉仪工作原理的基础上提出了多信号交叠对MBI 接收机测向的干扰策略,并进行了理论分析与仿真校验。由仿真结果可知,通过构建多信号环境,对敌MBI 测向接收机实施干扰,将使得敌无法获得有用信号(雷达信号)的方位信息;并可扰乱其MBI 测向接收机的正常工作。本文的研究为针对电子侦察中的MBI 测向接收机干扰提供了理论支撑,工程中也便于实现,有较好的实际应用价值。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
九江学院学报(自然科学版)(2022年2期)2022-07-02
电气技术(2021年3期)2021-03-26
计测技术(2020年6期)2020-06-09
通信电源技术(2020年22期)2020-03-27
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
大科技(2016年1期)2016-07-17
工业设计(2016年6期)2016-04-17
海军航空大学学报(2015年4期)2015-02-27