
同向滑杆并联机构的模糊自适应滑模控制*
2023-02-04 01:12沙鑫美吕小祥
组合机床与自动化加工技术 2023年1期
沙鑫美,吕小祥,徐 伟
(1.三江学院机械与电气工程学院,南京 210012;2.光大生态环境设计研究院有限公司,南京 210000)
0 引言
并联机构凭借其具有承载能力强、响应速度快[1]、精度高、误差小、刚度大和结构稳定等方面的优点[2]成为大多数学者和研究人员的研究热点,进而被广泛应用于各种机械装备。同向滑杆支链的3-PUPU并联机构[3]是为了解决快递行业在分拣包装时需要更大的工作空间而设计的构型,机构的末端输出的期望的位移点,常常通过位置反解求得,在应用过程中发现传统的控制策略使得同向滑杆支链的3-PUPU并联机构的实际位姿和期望位姿存在误差,即该机构的轨迹跟踪精度较低。对于并联机构而言,其控制策略的研究是少自由度和冗余并联机构研究的重要领域[4],而提高其轨迹跟踪精度是控制研究中急需解决的问题[5]。
由于并联机构具有时变性以及非线性等特征[6],因此学者们通常采用智能控制和传统控制相结合的方法来达到和实现预期的控制效果。王海芳、叶双双等[7-9]以基于模糊自适应PID控制的控制方法分别对3-SPS/S的踝关节并联康复机构、4-SPS(PS)并联机构、考虑关节摩擦的3-UPS/PU并联机构进行轨迹跟踪精度误差的分析和仿真研究,研究结果表明该控制方法能够有效提高机构的轨迹跟踪精度及响应速度,其鲁棒性强且稳态误差小、驱动力无抖振现象。赵劲松、李善锋等[10-15]分别对不同的并联机构,采用各自改进后的滑模变结构控制策略和模糊PID控制算法,对机构的位移轨迹跟踪和运动精度进行了实时控制仿真。仿真结果表明滑模变结构控制优于传统PID控制且能更快速地趋近于稳定状态。
本文为改善同向滑杆支链的3-PUPU并联机构在分拣包装时运动轨迹跟踪低的问题,以该机构为研究对象,提出了一种模糊自适应滑模控制方案,建立了机构的运动学模型和动力学方程,通过对机构的运动轨迹跟踪和实验研究,对模糊自适应滑模变结构控制策略下的轨迹跟踪特性以及对快递的精准分拣与包装是否有效展开研究。
1 并联机构运动学建模
含同向滑杆支链的3-PUPU并联机构的机构简图和3D仿真图如图1a和图1b所示,其包含3条相同且均匀分布的驱动支链PUPU,定平台(F1F2F3)及动平台(M1M2M3)3部分组成;其中P为移动副,U为万向铰副,机构通过U副与由三角形构成的定平台相连,P副与动平台相连且为机构提供动力,在机构的定平台ΔF1F2F3和动平台ΔM1M2M3的几何中心点处分别建立机构的定坐标系O-XYZ和动坐标系o-xyz,Ai是滑块和滑杆Pi在铰上沿连杆方向的交点,Bi是滑杆Pi和动平台万向铰处的交点,Fi是导轨Li和滑块的交点。

(a) 机构简图 (b) 3D仿真图图1 基于同向滑杆支链的并联机构简图和3D图
安装在动平台的万向铰链的中心轴线与动平台垂直相交,根据机构的几何特征设动平台外接圆半径为r,各滑杆Li相邻间距离为d,滑杆Li沿Y轴方向与坐标原点的距离为ei,滑杆Pi的长度为li,FiAi点之间的高度为h,点BiMi间的距离为h0。设Pi与XOY平面所成的角度为θi,BiCi在XOY平面的投影线与X轴的角度为δi。
因此点Fi和Ai在坐标系O-XYZ中可表示为:
(1)
(2)
点Mi在坐标系o-xyz中可以表示为:
(3)
采用Z-Y-Z型姿态欧拉角(α,β,γ)及坐标变换原理可以将旋转变换矩阵表示为:
(4)
式中,
f11=cαcβ,f12=cαsβsγ-cγsα,f13=cαsβcγ+cγcα,
f21=sαsβ,f22=sαsβsγ+cγcα,f23=sαsβcγ-cαsγ,
f31=-sβ,f32=cβsγ,f33=cβcγ。
式中,s代表sin;c代表cos;因此可以根据位姿确定并联机构动平台点Mi由o-xyz坐标系转换到O-XYZ坐标系中的坐标如下:
(5)
式中,o=(xo,yo,zo)T,将式(5)整理可得:
(6)
由同向滑杆支链并联机构的几何关系可以得到点Bi在坐标系O-XYZ中可以表示为:
(7)
(8)
式中,
由机构的几何特征及两点的距离公式可得:
|AiBi|=li,i=1,2,3
(9)
因此,对式(1)~式(9)整理可得:
(10)
基于式(1)~式(10)和MATLAB算法程序就可以求解得到并联机构的位置逆解,而且同向滑杆支链并联机构的求解过程相对简单,得到的解具有唯一性。
2 并联机构的动力学建模
在独立坐标系O-XYZ中通过建立同向滑杆支链的3-PUPU并联机构的动力学方程及机构驱动力和动平台各参数关系,系统动力学的拉格朗日方程如下:
Fi+Ri-Qi=0,i=1,2,…,n
(11)
式中,Ri为主动力;Pi为约束反力;-Qi=miai为惯性力。根据虚位移和并联机构的平稳性有:
(12)
式中,δpi为广义坐标虚位移,其广义坐标与机构的自由度同数,因此对于同向滑杆支链的并联机构的广义坐标是3个滑块的位移di(i=1、2、3)和3个滑杆的长度li(i=1、2、3),机构的广义自由度k=6;那么在理想完约束下,质点系满足以下方程:
(13)
由式(12)和式(13)得:

(14)
(15)
式中,E为系统总动能,其包括动平台的动能E1和所有连杆的动能E2,则有:
(16)
(17)


(18)
因此机构的动平台各滑块和滑杆的驱动力可通过式(11)~式(18) 化简求得动力学分析一般式:
(19)

(20)
3 构建并联机构控制系统
在Pro/E软件中建立基于同向滑杆支链并联机构的实体模型;在Simulink中建立并联机构的SimMechanics结构图,如图2所示,添加相应的检测和驱动模块,即可建立基于同向滑杆支链并联机构的控制系统框图,如图3所示。
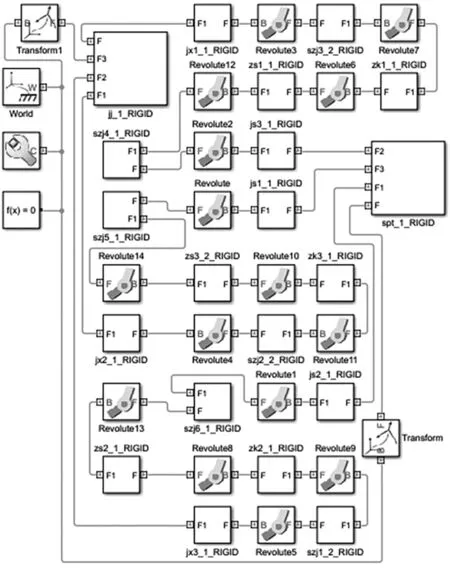
图2 并联机构SimMechanics结构图
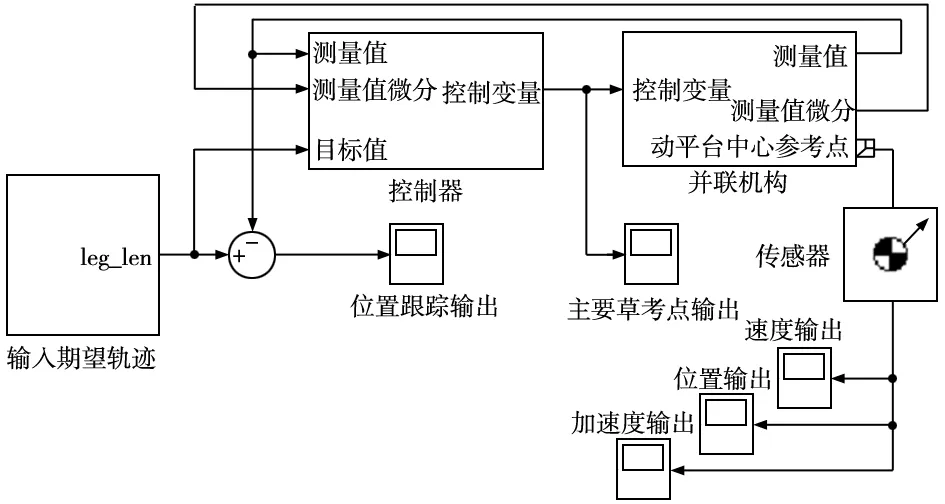
图3 并联机构控制系统框图
其中,输入期望轨迹是根据式(1)~式(10)的运动学方程和设定的输入期望轨迹,计算各滑杆和滑块的距离变化量以及动平台的位置计算,为并联机构提供可参考的输入值。控制器为并联机构的典型PID控制系统可以反馈物理模型的实时测量值和目标值以及测量值的微分值,同时输出控制量的值,由控制量控制并联机构的系统以达到期望目标值,其中PID控制原理可以表述为:
(21)
式(21)为根据反馈误差来输出函数的过程,k0、k1、k2为3个可控参数;e为系统误差,而控制量等同于u,表示为输出函数。
而并联机构模块是由如图2的SimMechanics创建,包含并联机构的定平台、动平台以及3个支链之间的几何关系以及机构的全局坐标系,并建立并联机构的初始状态,包括被控并联机构的的动力学方程;动平台的位置、速度、加速度和差值变化、主要参考位置通过传感器输出到示波器Scope中,并分别显示相应的输出曲线。
为削弱并联机构的抖振,引入切换函数s(x)和幂次趋近律,其表达式为:
s(x)=e+Ce
(22)
(23)
式中,e为系统误差;C=diag(C1,…,Cn),Ci>0;k>0;0<α<1,系统通过增大或减小α值来提高或者降低趋近速度同时缩短趋近时间来削弱抖振。因此,为了提高并联机构系统的轨迹跟踪精度,引入模糊自适应滑模变结构控制器通过模糊自适应算法,对SMC控制器的参数C和参数α进行在线实时修正,而模糊自适应滑模变结构控制器的示意图如图4所示。

图4 模糊自适应SMC控制原理图

(24)
4 并联机构仿真分析及实验研究
基于同向滑杆支链的并联机构的各项参数[3]如表1所示。
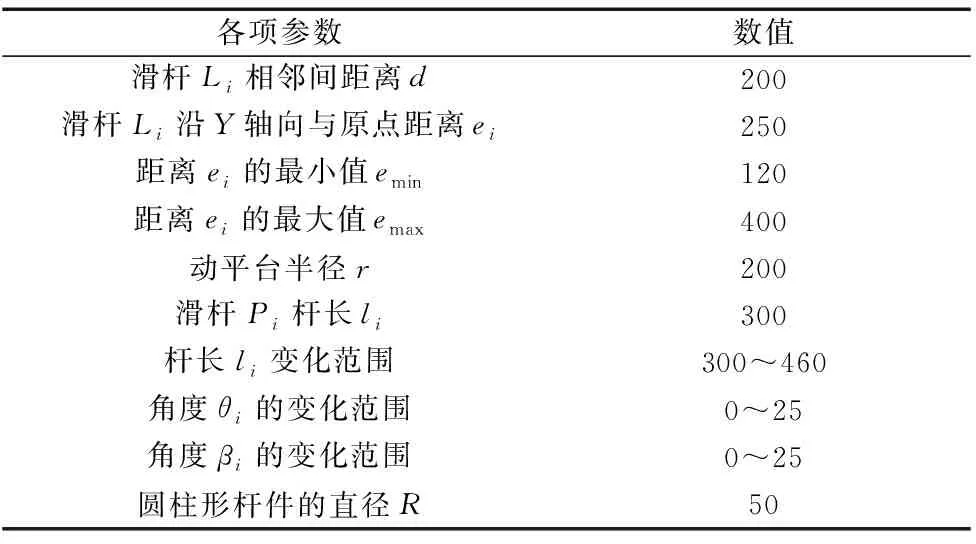
表1 并联机构的各项参数数值
设机构的理想输入信号为:qd=sin(π/10)t,将表1中各项参数的数值以及理想驱动输入信号和并联机构的运动学方程输入到图3的输入期望轨迹模块和控制器模块中,在MATLAB中进行仿真,并通过控制器调节参数直至输出曲线平稳无明显抖动,输出实际信号并得到并联机构各方向的理论输入曲线和实际输出曲线的对比结果,如图5~图7所示。

图5 x轴向理想输入与实际输出仿真对比图 图6 y轴向理想输入与实际输出仿真对比图
由图5~图7可知,虽然并联机构系统存在小误差范围的延迟,但在各轴向的实际输出曲线与理论输入曲线的重合度很高。在仿真基础之上,搭建了并联机构的实验平台,验证模糊滑模控制算法的有效性,并联机构动平台的期望运动轨迹和实际运动轨迹,如图8所示。

图7 z轴向理想输入与实际输出仿真对比图 图8 机构动平台的轨迹跟踪曲线
可以看出,机构在0~1 s的较短时间内,动平台的运动轨迹出现了不规则波动,但随着控制器中的模糊自适应滑模算法的运行,动平台运动轨迹在1 s后的运动迅速趋于稳定且无明显抖振,动平台实测的运动轨迹与理想期望运动轨迹几乎是重合的。仿真和实验结果充分验证了模糊滑模控制算法的有效性,其具有较高的轨迹跟踪精度、较小的稳态误差和较强的鲁棒性。
5 结论
对基于同向滑杆支链的3-PUPU并联机构的模糊自适应滑模控制仿真及实验研究可知:
利用机构的几何特征关系建立的逆运动学求解方程,求解过程简单且解具有唯一性。 仿真和实验结果充分验证了模糊滑模控制算法的有效性,其具有较高的轨迹跟踪精度、较小的稳态误差和较强的鲁棒性。
猜你喜欢
壹读(2020年1期)2020-12-08
汽车与新动力(2019年4期)2019-09-18
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
中学生英语(2011年31期)2011-08-28
中国机械工程(2010年9期)2010-06-04
