低空无人机平台应用于海滩地形监测的初步研究
2023-02-20 08:29陈奇张阳唐雯雯朱永兰何方婷宗羿冰贾建军
海洋地质与第四纪地质 2023年6期
陈奇,张阳,唐雯雯,朱永兰,何方婷,宗羿冰,贾建军
河口海岸学国家重点实验室,华东师范大学海洋科学学院,上海 200241
海滩是由激浪和激浪流作用,在海滨塑造形成的松散沉积物堆积体[1],其自然侵蚀过程往往因人类活动或极端天气事件发生加速或侵蚀程度剧增,即在短时间内引起较大的地形变化[2-3]。据1984—2016 年间卫星海岸线数据的分析显示,全球24%的砂质海滩正以超过0.5 m/a 的速率遭受侵蚀[4],有学者预测到2050 年,全球13.6%~15.2%的沙滩将遭受侵蚀,到21 世纪末,这个比例将提升至35.7%~49.5%[5]。中国海滩侵蚀现状同样严峻[6-7],2010 年国家海洋局报告显示,全国49.5%的砂质海岸及7.3%的粉砂淤泥质海岸正在遭受侵蚀[8]。据联合国政府间气候变化专门委员会(IPCC,Intergovernmental Panel on Climate Change)估计,至2100 年海平面将上升50 cm,有研究预测届时中国主要旅游海滨沙滩的面积将损失13%~66%[9]。随着全球气候变化及人类活动的影响,海滩侵蚀的状况也在日益加剧。为了能更好地对海滩进行管理和维护,需要更准确、分辨率更高的地形测量方法来监测海滩并对其形态变化状况进行量化[10]。
目前,较为广泛使用的海滩监测技术包括全球定位系统实时动态测量(RTK-GNSS,Real Time Kinematic-Global Navigation Satellite System)、光 学卫星遥感影像、激光雷达测量、无人机SFM(Structure from Motion)摄影测量等[11-12]。不同的方法各有优劣,RTK-GNSS 技术虽然精度较高,但在实际测量过程中耗时较长,更适用于小区域测量[13-14];光学卫星遥感影像在大区域尺度的监测工作中占有优势,有较高的分辨率与准确性(分米级),但容易受到地球上空云层的影响[15-16];航空摄影测量的数据质量和更新速率优于卫星遥感,但是调查结果的可重复性取决于预算[17];激光雷达测量包括地面激光雷达与机载激光雷达,地面激光雷达可以生成高精度的地形数据,还能进一步对侵蚀状况进行分析,但是其测量范围受到激光视域的限制[18];机载激光雷达能获取大范围的高精度地形数据,但受到天气的限制[19-20]。此外,卫星遥感、航空摄影、地面和机载雷达的监测成本也比较高。相较于其他监测方法,无人机SFM 摄影测量是一种基于立体摄影测量原理的三维地形重建技术[21-22],具备数据分辨率高、监测区域广、对监测对象的影响小、可重复性强、适用海岸类型广泛等特点[23]。此外,消费级无人机的普及大大降低了无人机平台应用于地形监测的成本,使得这一技术的应用得以快速扩展[24-25]。
本研究以浙江省象山县南田岛大沙沙滩为研究区,以中国大疆创新公司生产的Phantom 4 RTK(简称P4)和经纬M300 RTK(简称M300)两种无人机平台为载体,对海滩地形进行监测,获取不同时期、不同监测高度、不同类型的数据共计5 组。基于处理后所得到的数字地表模型(DSM, Digital Surface Model)数据,分析无人机平台类型、飞行高度、监测方法等多方面因素对海滩地形监测数据的影响。以大沙沙滩冬季前后海滩变化监测为例,展示低空无人机平台海滩应用于海滩监测的效果,为无人机海滩监测进一步应用提供参考,为更好地管理与养护海滩做出贡献。
1 材料与方法
1.1 低空无人机参数
综合各项规定与标准[26-29],本研究将飞行高度低于1 000 m 的航空摄影无人机平台定义为低空无人机平台。使用P4(搭载测绘相机等模块,可进行SFM 摄影测量)与M300(搭载禅思L1 镜头,集成测绘相机、激光雷达等模块,可同时进行SFM 摄影测量与激光雷达测量)两种低空无人机平台完成海滩监测,无人机平台参数详见表1。
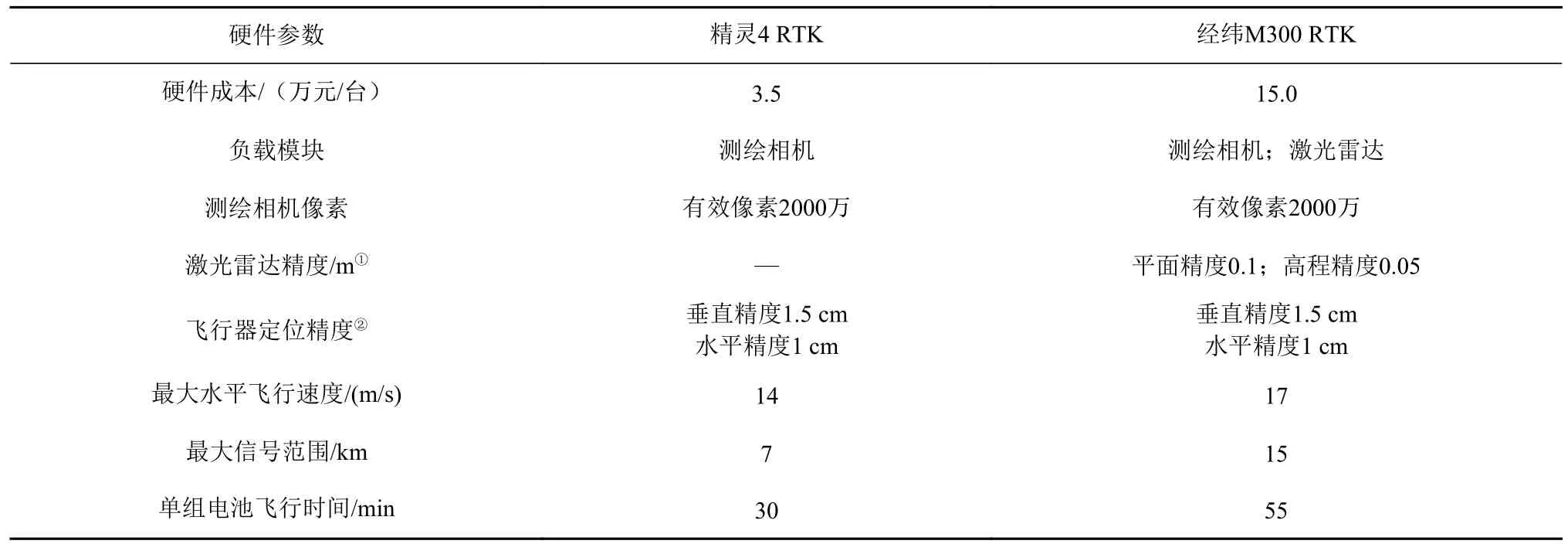
表1 无人机平台硬件参数Table 1 Hardware parameters of two drone platforms used in this study
1.2 数据采集
选定浙江省象山县南田岛大沙沙滩作为研究区(图1)。大沙沙滩位于象山县南田岛东部,属于岬湾型海滩,长约800 m,宽约150 m,海滩表面沉积物主要为砂质。附近海域属于正规半日潮,潮流类型为旋转流[30],最大潮流平均流速为65 cm/s[31]。沿海波浪以涌浪为主的混合浪达99%左右,年平均波高为0.4 m,最大波高为1.7 m,年平均波周期为7.2 s,最大波周期为13.1 s,波浪具有明显的季节变化,混合浪中,涌浪的常浪向为东向,冬季则多北东、东向,夏季多南、东南向。风浪的浪向,常受季风影响,秋季多北、北东向,夏季多偏南向[31],浪向转换时间在5 月及9、10 月间。大沙沙滩是浙江少有的海滩剖面较为完整、有海岸沙丘存在、受人类活动影响较小的天然海滩,其表面沉积物粒度分选较好,滩面无植被覆盖,反射特征一致,减小了其他因素的影响,是进行无人机海滩监测技术评价的理想地点。

图1 大沙沙滩的地理区位及监测范围a:大沙沙滩地理区位;b:海滩监测范围,红框为测次A、B 监测范围,蓝框为测次C、D、E 监测范围。Fig.1 Location of Dasha Beach and the monitoring areas a: geographic location of Dashan Beach; b: beach monitoring range, red box for monitoring areas A and B, blue box for monitoring areas C, D, and E.
本研究分别于2022 年12 月23 日冬季大潮低潮位、2023 年4 月7 日春季大潮低潮位、2023 年4 月9 日春季中潮低潮位在大沙沙滩完成了5 个测次的海滩监测(表2);所有测次统一采用WGS-84 坐标系,其飞行高度为相对于起飞点的高度。测次A 与B 均进行了整个大沙海滩的地形监测(图1b红框),测次C、D 和E 仅完成了大沙沙滩部分区域的地形监测(图1b 蓝框)。所有测次重叠度设置与影像地面采样间隔(GSD,Ground Sampling Distance)均符合GB/T 39 612-2020 内航摄基准面地面分辨率设计范围要求[28]。

表2 不同测次的无人机平台及摄影技术参数Table 2 Two drone platforms and photogrammetric parameters for different surveys
监测过程中,共布设了像控点、检查点、验证点三种点位(图2,表3),用于分析无人机SFM 摄影测量的准确性和误差。像控点与检查点是在沙滩表面放置的30 cm×30 cm 的木制板状标志物(图2e);另在监测区域均匀选取海滩剖面,每个剖面选取10 个点位作为验证点,验证点无地面标志物(图2f)。使用中海达IRTK5 X 测量型GNSS 接收机结合商业CORS 系统(千寻知寸,定位精度厘米级)对上述所有点位进行定位。

表3 像控点、检查点和验证点的数量Table 3 The quantity of image control points, check points, and validation points
地面像控点一般用于SFM 摄影测量,作用有两方面:一是在内业处理过程中优化无人机影像或激光雷达与像控点的匹配结果,二是用于验证无人机影像或激光雷达初步反演的地形结果的准确性[32],检查点一般为预留的冗余地面像控点[28],同样布设了地面标志物。在利用像控点对影像匹配结果进行优化并得到沙滩高程数据后,可利用检查点通过刺点方式分析高程数据准确性。验证点数量与分布区域均大于像控点与检查点,利用验证点,可以对监测区域不同位置高程数据准确性进行更全面精细的分析评估,讨论监测结果的可用性[33-34]。
1.3 数据处理
利 用Pix4D Mapper 以 及Global Mapper 软 件 对无人机数据进行内业处理,Pix4D 负责完成原始无人机影像的处理,输出正射影像与数字地表模型(Digital Surface Model,DSM)数 据。Global Mapper主要实现三方面的功能:一是提取验证点的DSM高程数据,以RTK-GNSS 测量数据为真值,对DSM高程数据准确性进行验证与比对;二是对测次C、D、E 的DSM 数据进行叠置分析,对比不同无人机平台或监测技术监测结果的差异;三是利用测次A、B 数据叠置分析结果讨论海滩地形的变化,并提取垂直于岸线的典型海滩剖面走势,分析海滩剖面特征,验证无人机应用于海滩监测的效果。
在统计分析过程中,参考低空数字航摄国标要求[28],计算每个测次像控点x、y、z方向的RTK-GNSS 测量值与反演值之间的均方根误差(RMSE,Root Mean Squared Error),见式1,并进一步分析平面误差(式2)、高程误差、整体误差(式3),同时计算检查点与验证点的RTK-GNSS 测量高程值与反演高程值的均方根误差:
式中,RMSE 为均方根误差,n为点位数量,ci为RTK-GNSS 测量值,fi为无人机监测反演值;p为平面误差,d为整体误差,a、b、c分别为x、y和z向的均方根误差。
此外,将验证点反演高程值结合RTK-GNSS 测量值计算协方差 cov(式4):
式中,cov 为协方差,判断RTK-GNSS 数据与反演高程值之间差值分布的离散程度,讨论无人机监测过程中仪器输出的稳定程度;n为验证点数量,xi为验证点反演高程值,x¯为验证点反演高程值的平均值,yi为验证点RTK-GNSS 测量值,y¯为验证点RTKGNSS 测量值的平均值。
2 结果
2.1 航摄数据分辨率与误差
所有测次数据分辨率均在2.5 cm/pixel 以下(表2),精度达到了厘米级。计算不同测次像控点RMSE,得到该测次数据整体平面误差、高程误差、整体误差(表4)。4 次SFM 摄影测量像控点数量大致相近,单方向误差均小于2.5 cm,平面误差最大值为3.09 cm,高程误差最大值为3.4 cm,整体误差最大为3.81 cm,像控点误差为厘米级。

表4 SFM 摄影测量像控点误差Table 4 The positioning error of image control points in SFM photogrammetry cm
5 个测次检查点RMSE 分别为4.51、4.89、2.78、2.41 和6.44 cm,检查点RTK-GNSS 高程测量值与反演高程值误差同样位于厘米级,说明无人机海滩监测结果与RTK-GNSS 测量结果之间差异较小,无人机海滩监测数据具备可信度。
5 组数据验证点RMSE 值均为10 cm 左右(图3),变化趋势与检查点一致。利用RTK-GNSS 高程测量值与反演高程值绘制散点图并进行线性拟合,5 组数据拟合结果R2均大于0.999,拟合程度较好;由于验证点均匀分布于整片海滩,所以拟合结果说明海滩整体反演高程值相较于RTK-GNSS 数据误差较小,进一步说明其数据质量具有可信度。

图3 各测次验证点准确性与误差a:测次A,b:测次B,c:测次C,d:测次D,e.测次E。Fig.3 Accuracy and error at validation points a: Flight A, b: Flight B, c: Flight C, d: Flight D, e: Flight E.
2023 年4 月9 日完成的测次C 飞行时间与测次D、E 的时间间隔在2 h 之内,测次D 与测次E 为同步测量,可以认为这3 个测次为同步或准同步监测,监测过程中海滩地形基本无变化。提取准同步监测数据的验证点高程值,并结合RTK-GNSS 数据计算两者间协方差(cov),结果见表5。利用同一时间、同一高度下不同无人机监测技术所得数据进行比较,发现P4 与M300 两平台监测稳定度相近,但仍有差异,P4 平台监测稳定度低于M300 平台。准同步监测对比结果显示,P4-SFM 摄影测量稳定度最差,M300-SFM 摄影测量次之,M300-LiDAR 监测稳定度最高, M300-SFM 摄影测量与 M300-LiDAR 监测稳定性差异极小。

表5 准同步监测不同测次数据离散程度Table 5 The data dispersion level of measurement in different surveys in quasi-synchronous monitoring
2.2 准同步海滩地形监测结果的差异
利用Global Mapper 的叠置分析功能对测次C、D、E 进行减法处理,分析3 个测次所得准同步监测结果之间的差异(图4)。
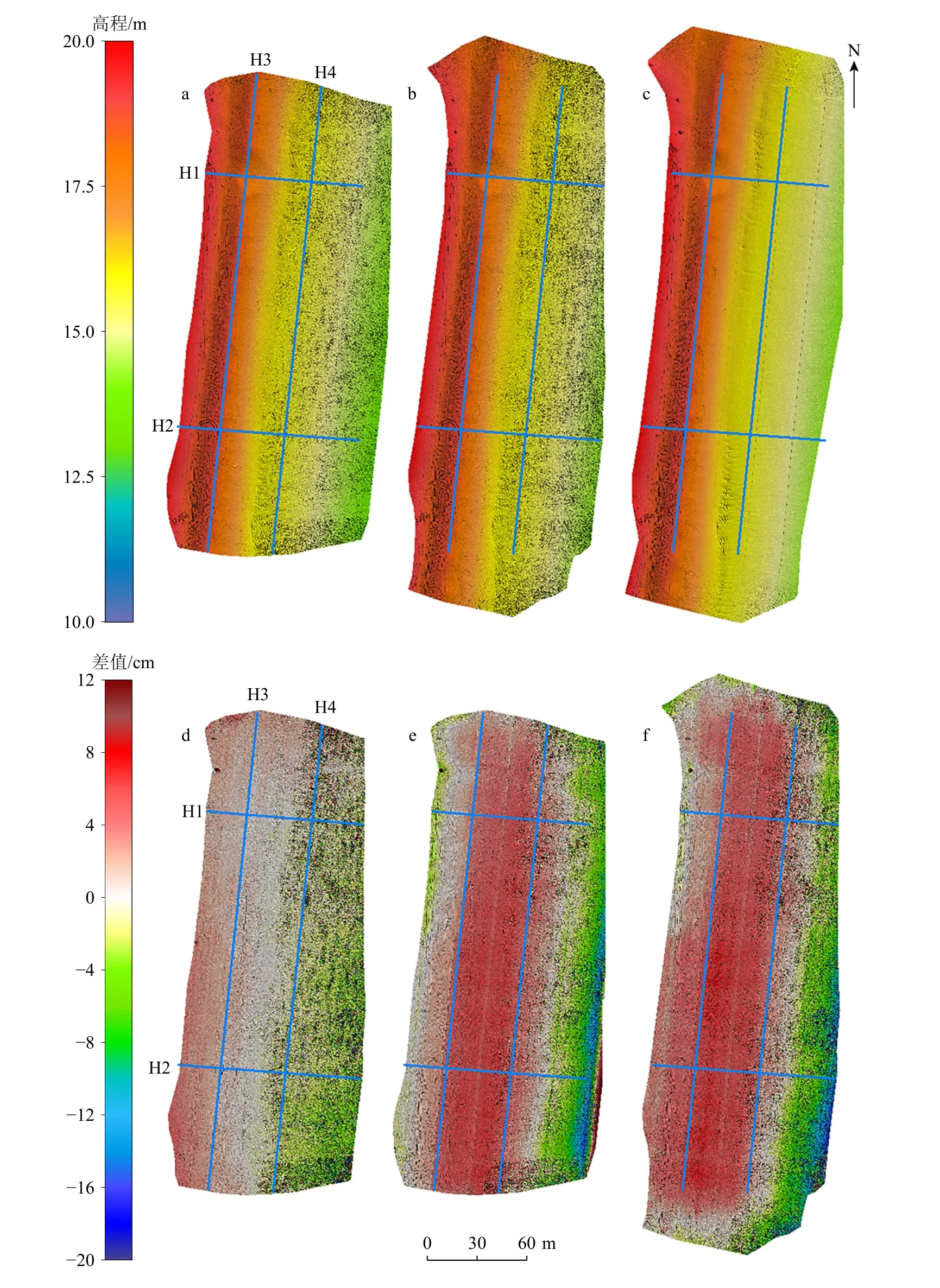
图4 沙滩高程准同步监测结果及其对比a:测次C,b:测次D,c:测次E,d:测次C 与D 差值,e:测次E 与C 差值,f:测次E 与D 差值。Fig.4 Quasi-synchronous monitoring results and their comparison of beach elevations a: Flight C, b: Flight D, c: Flight E, d.Difference between Flight C and Flight D, e: difference between Flight E and Flight C, f: difference between Flight E and Flight D.
测次C 与D 之间整体差异最小(图4d),滩肩部位差值最接近于0 cm,后滨区域表现为测次C 高程值较大或两测次差异较小,前滨滩面多呈现测次D 高程值较大的情况。
测次E 高程与另外两测次数据的差值更大(图4e,4f),其中滩肩及附近位置测次E 激光雷达数据明显较高,滩肩向两侧差值减小逐渐接近于0 cm;在水边线附近,测次E 高程值低于测次C、D 这两种SFM 摄影测量结果。
提取垂直岸线方向与平行岸线方向剖面各两条(图4a),进一步分析准同步监测的差异。垂直岸线方向的H1、H2 剖面结果显示(图5),测次C 与D 整体差异较小,后滨高程绝对差值低于5 cm;测次C 监测高程较高,前滨滩面差异较大,绝对差值最大可达20 cm,普遍表现为测次D 监测高程较高;测次E 与C、D 之间的差异沿剖面变化趋势基本一致,由陆向海,测次E 与C、D 之间差值表现为由负到正再到负,测次E 监测高程在剖面中部区域大多高于测次C、D。平行岸线方向的H3、H4 剖面结果展示了准同步监测差异在后滨与前滨的区别(图5):H3 剖面显示,后滨区域测次C 与D 差异较小,测次C 监测高程大于测次D,差值均在3 cm 以下,测次E 监测高程多数大于测次C、D 的监测高程,绝对差值最大值分别低于6、8 cm;H4 剖面显示,前滨区域测次C 与D 差异较小,多数区域绝对差值在1 cm 左右波动,测次E 监测高程依旧明显高于测次C、D,多数区域绝对差值在4 cm 左右。

图5 准同步监测剖面对比Fig.5 Comparison of quasi-synchronous monitoring profiles
2.3 海滩地形监测
测次A 与B 像控点整体误差低于4 cm,检查点误差小于5 cm,验证点误差为10 cm 左右,监测精度为厘米级,选择测次A 与B 的结果对大沙沙滩地形变化进行分析(图6a、b)。利用Global Mapper 进行叠置分析(图6c),获取海滩地形冬季前后的变化状况,检验无人机海滩地形监测的效果。此外,在大沙沙滩地形变化较为代表性的区域提取了T1 与T2 两个剖面(图6c),进一步细化分析海滩高程变化状况(图7),直观展现无人机应用于海滩地形地貌监测的能力。
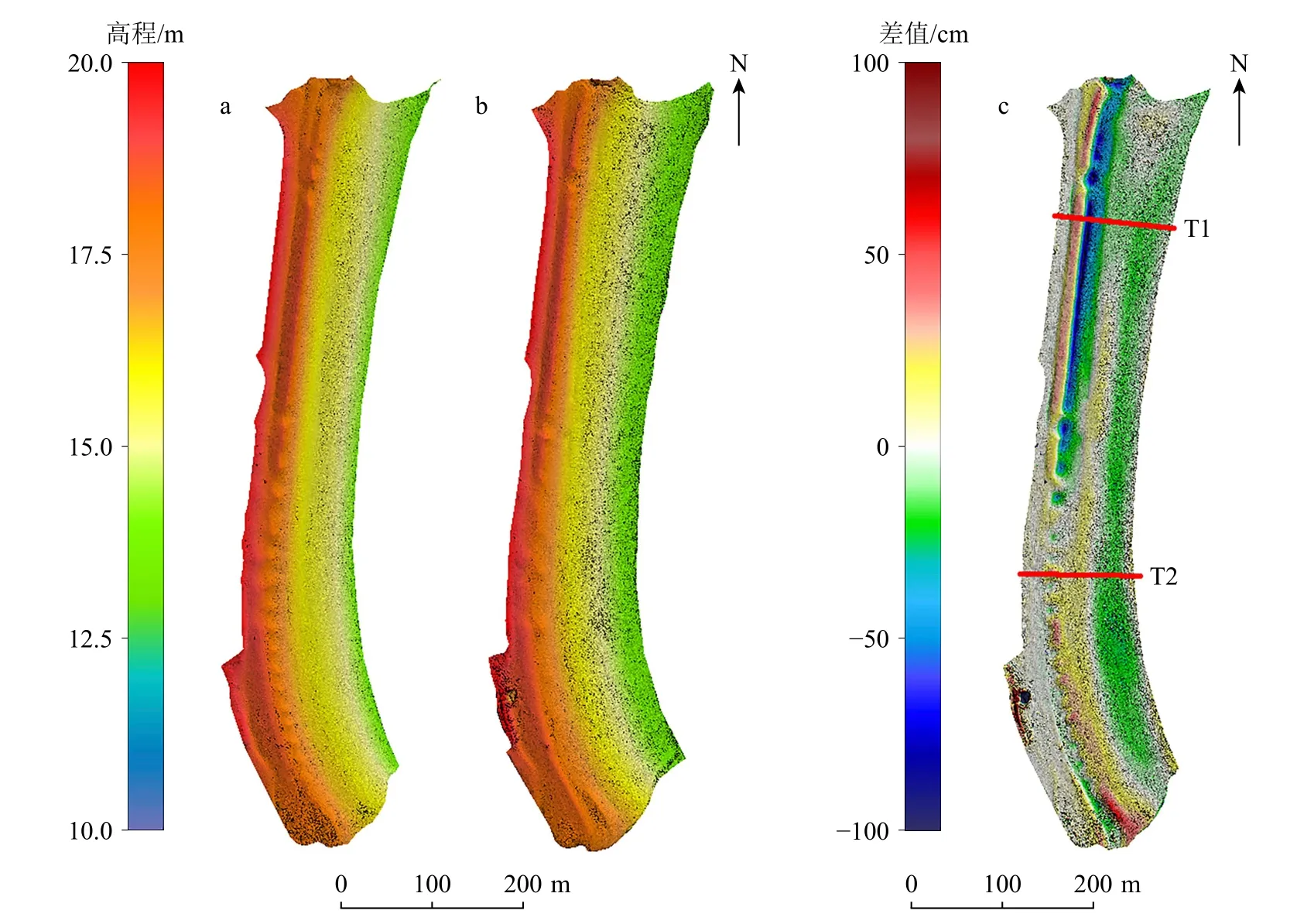
图6 同平台、同参数的两期海滩地形监测结果及对比a:测次A 数字表面模型,b:测次B 数字表面模型,c:地形变化与剖面位置。Fig.6 Two-phase beach topography monitoring results and comparison under the same platform and parameters a: Digital surface model for Flight A; b: digital surface model for Flight B; c: terrain changes and profile locations.

图7 测次A、B 所得海滩剖面形态及侵淤变化Fig.7 Monitoring results of beach profiles for Flight A and Flight B
研究区冬季监测海滩长约800 m,宽度最宽处约150 m,最窄处约105 m,高程基本位于13~20 m区间,约占大沙沙滩99.93%的区域,约0.07%的海滩高程处于20~21.6 m。春季海滩监测结果海滩长度基本无变化,监测区域宽度最宽处约165 m,最窄处约125 m,高程基本位于11~20 m,约占整个海滩99.76%的区域,约0.24%的海滩高程处于20~21.3 m 之间。监测结果中54.15%的区域遭受侵蚀,研究区海滩大多呈现侵蚀状态,其中43.37%的区域侵蚀幅度低于20 cm;45.85%的堆积区域内,有35.85%的区域变化幅度低于20 cm,共计79.22%的区域变化幅度位于20 cm 以内,说明海滩虽然处于变化状态,但大部分区域变化幅度并不剧烈。
于大沙沙滩地形变化较为代表性的区域提取了T1 与T2 两个剖面数据(图7),对剖面变化状况进行更细致直观的展现:
T1 剖面:剖面类型基本保持原状为滩肩式断面,坡度减小,滩肩整体向后蚀退约8 m;后滨与滩肩陆侧部分区域呈现堆积,最大堆积高度约35 cm;滩肩向海侧与前滨滩面出现侵蚀,剖面最大侵蚀高度达到100 cm 左右,滩肩以下近海区域变化幅度较小,侵蚀高度处于25 cm 之内;剖面侵蚀区域单宽冲蚀量为20.17 m³/m,堆积区域单宽淤积量为3.72 m³/m,整体表现为侵蚀,单宽冲蚀量为16.45 m³/m。
T2 剖面:剖面类型从沙坝式断面向滩肩式断面转变,滩肩长度较窄,坡度增大,剖面由陆向海呈现出先堆积后侵蚀的趋势,最大堆积高度约40 cm,最大侵蚀高度约20 cm;侵蚀区域单宽冲蚀量为4.52 m³/m,堆积区域单宽淤积量为9.72 m³/m。整体表现为堆积,单宽淤积量为5.20 m³/m。
整体来看,2 条典型剖面分别表现为侵蚀与堆积。滩肩变化呈现南北分异,北部海滩滩肩向岸蚀退,坡度减小,后滨堆积,淤积幅度低于35 cm,滩肩整体表现侵蚀,最大侵蚀幅度约100 cm,前滨滩面多为侵蚀或上淤下侵,侵淤变化低于20 cm。南部海滩相较而言剖面形态更为稳定,后滨基本无变化,滩肩表现堆积,高度低于50 cm,前滨滩面多为侵蚀,高度低于20 cm。
3 讨论
3.1 无人机平台获取海滩地形数据的质量
现有低空数字航测与数据处理国家标准(GB/T 39612-2020)规定了不同比例尺地图在各类地形下的像控点误差要求(表6)[28]。本研究在2.1 节计算了不同测次的像控点误差,其中平面误差最大值为3.09 cm,高程误差最大值为3.40 cm(表4),完全符合GB/T 39612-2020 对于野外像控点最严格要求、即1∶500 成图比例尺的要求,表明本研究所用低空无人机平台测绘海滩地形的像控点测量误差全部符合国家标准。
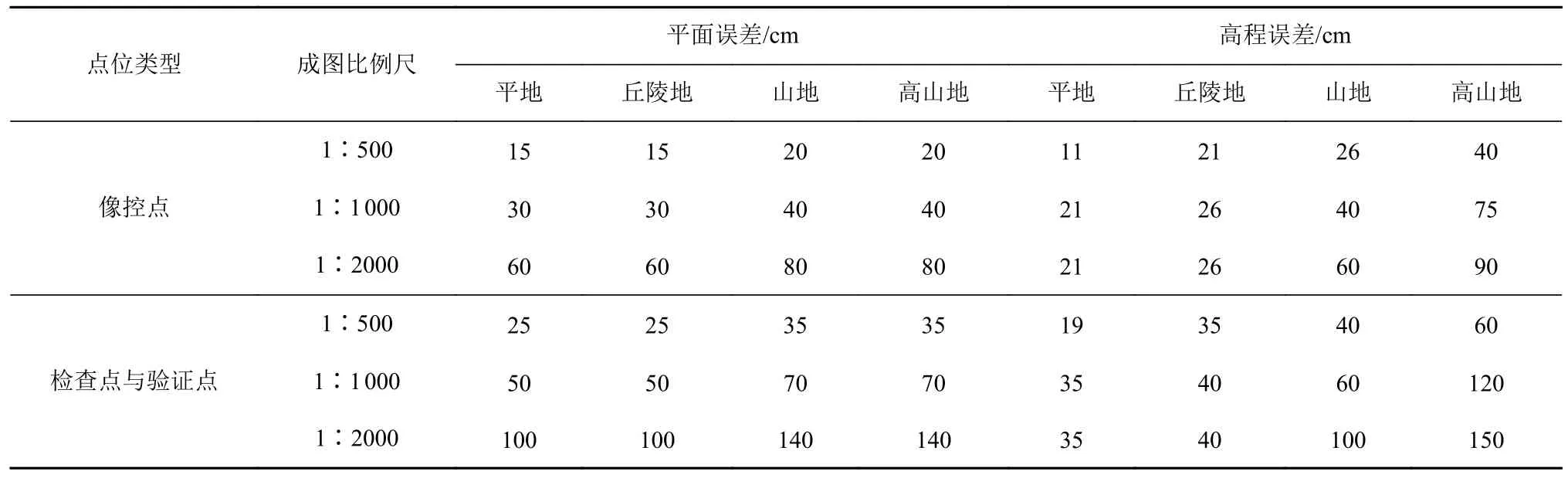
表6 低空数字航摄与数据处理规范规定的点位误差Table 6 The positioning errors specified in China’s national standard for low-altitude digital aerial photography and data processing
GB/T 39 612-2020 对于检查点与验证点的误差同样提出了要求(表6)。本文2.1 节计算了5 组监测数据所有检查点反演高程误差,均符合国标要求,其中M300-激光雷达测量数据检查点误差最大,为6.44 cm,也远小于国标要求的19 cm。此外,提取了大量验证点用以验证无人机反演高程值的准确性(图8),共计260 个点位精度数据中,仅有一个点位误差值大于19 cm,其余验证点误差均小于19 cm,进一步说明无人机在海滩地形监测工作中的适用性。
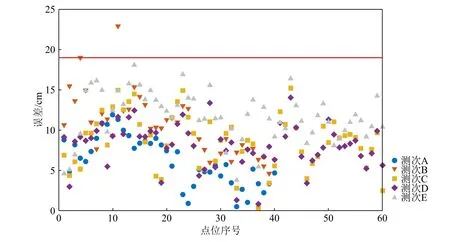
图8 不同监测数据验证点高程误差红色横线为低空数字航测国家标准1∶500 地形图要求的验证点高程限差。Fig.8 The elevation errors at validation points of different monitoring data The red line is the elevation tolerance limit as required by the national standard for 1:500 topographic maps in low-altitude digital aerial survey.
本研究以单个测次反演结果与RTK-GNSS 高精度测量结果之间的差异作为评判无人机平台精度的参考值,而海滩地形变化监测工作还应当在此基础上考虑海滩地形变化的精度,进一步给出海滩地形变化监测精度的评判方法。可以考虑布设水泥测桩或选取特征明显且固定的点位作为不动点,基于正射影像完成刺点,提取点位反演高程值,计算两次监测结果中不动点高程差值,并以此为参考判断海滩地形是否存在变化。若两次海滩地形监测结果的对比显示,有部分区域的地形变化幅度小于不动点变化值,则判断该区域的海滩地形基本不变;当对比监测结果的高程变化幅度大于不动点变化幅度时,才判断为存在地形变化的海滩。这方面的研究工作宜进一步深入。
3.2 无人机平台监测海滩地形的影响因素
3.2.1 无人机平台与监测技术的差异
同一无人机平台、不同监测技术会造成地形监测的差异。本研究利用M300 无人机平台在春季同步完成了SFM 摄影测量与机载激光雷达测量的两组监测(参见图3d 与图3e),尽管飞行高度、飞行区域、飞行时间等参数相同,其误差却截然不同。测次D 检查点与验证点高程误差分别为2.41 cm 与8.52 cm,测次E 检查点与验证点高程误差分别为6.44 cm 与12.08 cm;相较于M300-LiDAR 激光雷达测量,M300-SFM 摄影测量结果与RTK-GNSS 结果更为接近。通过叠置分析得到测次E 与测次D 海滩监测结果之间的差值分布(图9c),结果显示,测次E 的激光雷达测量结果更多高于测次D 的SFM摄影测量结果,高程差值4~5 cm 区间占比最大为15.3%(图9c),93.42%的区域高程绝对差值小于7 cm(图9d),共有71.32%的区域高程差值大于0 cm。结合两种监测技术与RTK-GNSS 对比结果,可知相较于P4-SFM 与M300-SFM 监测结果,M300-LiDAR监测结果与RTK-GNSS 结果差异更大,监测结果多数偏高。

图9 准同步监测差值分布直方图a:测次C 与D 差值,b:测次E 与C 差值,c:测次E 与D 差值,d:准同步监测差值累积分布。Fig.9 Histogram of differences distribution from quasi-synchronous monitoring a: difference between Flight C and Flight D; b: difference between Flight E and Flight C; c: difference between Flight E and Flight D; d: cumulative distribution of quasi-synchronous monitoring differences.
测次C 与D 均为30 m 飞行高度下进行的SFM摄影测量,其中测次C 的检查点与验证点RMSE 分别 为2.78、8.26 cm,测 次D 的 检 查 点 与 验 证 点RMSE 分别为2.41、8.52 cm。相较于P4 平台完成SFM 摄影测量的测次C,M300 平台的测次D 与RTK-GNSS 测量值之间的差值更小,同为SFM 摄影测量结果,M300 平台海滩监测数据质量更高。测次C 与D 使用的是两种不同的无人机平台,其中P4 平台监测结果更多高于M300 平台监测结果,两测次之间的差异主要为4 cm 以下(图9a),占据了91.22%的区域(图9d),其中0~1 cm 区间占比最大为20.7%,55.37%的区域监测高程差值大于0 cm。结合以上分析与表4 内容,可知当运用同种监测技术时,M300 平台的飞行稳定性更高,其数据质量优于P4 平台。
将测次C 与E 进行对比分析,可以进一步了解P4-SFM 摄影测量监测结果与M300-激光雷达监测结果之间的差异(图9b)。测次C 检查点与验证点RMSE 分别为2.78、9.26 cm,测次E 检查点与验证点RMSE 分别为6.44、12.08 cm,测次C 数据质量高于测次E。将两测次数据进行叠置分析,可以发现,5~6 cm 区间占比最大(12.97%),92.26%的区域高程绝对差值集中于7 cm 以下(图9d),68.85%的区域高程差值大于0 cm,M300-激光雷达监测结果同样普遍高于P4-SFM 摄影测量监测结果。
3.2.2 海滩地物特征对监测技术的影响
由于不同监测技术之间的差异,监测地物本身的特点也将影响监测结果。SFM 摄影测量是基于图像匹配算法开发的一种海滩监测技术,对图像纹理有较强的依赖[35],易受到海滩表面的光学性质的影响。因此SFM 摄影测量在地形平坦、海滩砂粒度均一或具有较高反射率的海滩表面进行地形监测会面临较大的困难[20]。例如,滩肩以下的海滩存在滞留海水所形成的薄膜,会增加图像共同点的识别难度,对海滩监测结果造成影响[36]。两组SFM 摄影测量监测结果中,由于海滩表面滞留海水的影响,其含水率较高,滩肩以下部分区域海滩监测结果有较多的噪声点,图5 中H1、H2 剖面的SFM 摄影测量结果显示,后滨无水区域监测结果曲线平滑,前滨滩面由于表面滞留海水的影响,监测结果噪声点明显增多;而激光雷达数据则整体较为光滑,滩肩以下无明显噪声。影响激光雷达测量结果的原因在于传感器视域的限制,无法对近乎垂直地形进行监测[12],而SFM 摄影测量则可以选择不同的监测角度,获取更多的侧面地物信息,避免出现由于角度导致的监测信息不全的问题。
3.2.3 其他因素
无人机参数设置同样会影响监测数据。以飞行高度为例,将春季两次不同高度P4 监测数据对比,其像控点误差结果直观反映了飞行高度的影响:同一时段下,60 m 飞行高度的像控点误差值均达到了30 m 飞行高度的2 倍左右。无人机SFM 摄影测量检查点高程误差同样符合这一结论,以3 次不同高度P4 监测数据为例,30 m 高度监测数据检查点的高程误差为2.78 cm,而60 m 高度监测数据高程误差分别为4.51、4.89 cm。
人为因素主要为RTK-GNSS 测量过程中的操作问题,影响检查点、验证点的RTK 测量准确性,从而进一步映射到无人机反演DSM 数据的准确性:徒手进行RTK-GNSS 测量难以保证测量杆的姿态分毫不差,导致实测验证点的RTK 高程比真实的海滩表面高程普遍偏低,误差为厘米级;而像控点与检查点由于布设了木制板状标志物,测量杆较容易控制,测量结果也相对更为准确,更能代表RTKGNSS 测量高程与无人机反演高程的比对结果。
4 结论
本研究以砂质海滩的地形监测为例,运用P4 与M300 两种无人机平台、SFM 摄影测量与激光雷达测量两种监测方法的组合获取了5 组海滩监测数据,进行了海滩地形测绘准确性的比较,并进行了季节尺度的海滩地形变化监测结果的对比,得到以下结论。
(1)所有数据地面采样间隔均小于2.5 cm/pixel,精度为厘米级,监测结果精度较高, RTK-GNSS 数据与反演高程数据拟合曲线R2均在0.999 以上,且所有点位误差符合GB/T 39 612-2020 对于1∶500 比例尺的要求,说明无人机海滩地形监测结果与RTK-GNSS 测量结果相似度较高,数据质量具有可信度。
(2)对比不同无人机平台、同步测量结果,相同地物点的高程值之差均为厘米级。测量方式带来的差异大于无人机平台之间的差异,同种监测技术、不同无人机平台进行对比,测次C 与D 高程绝对差值主要为4 cm 以下。不同监测技术进行对比,测次E 激光雷达测量结果与测次C、D 两次SFM 摄影测量数据高程差值均主要为7 cm 以下。相同无人机平台的监测误差会随着高度的增大而增大,测次B 与C 检查点高程误差分别为4.89 cm 与2.78 cm。平坦、粒度均一的海滩将增加SFM 摄影测量的实施难度,由于传感器视域限制,激光雷达测量应避免在地形近乎垂直区域使用。
(3)Phantom4 RTK 无人机平台对大沙沙滩整体地形的分析与冬季前后地形变化的监测均有较好的效果。大沙沙滩99%以上的区域高程为13~20 m;自然因素影响下,北部海滩后滨堆积,淤高幅度低于35 cm,滩肩部位整体侵蚀,最大侵蚀幅度约100 cm,前滨滩面多为侵蚀或上淤下侵,侵淤变化低于20 cm;南部海滩后滨基本无变化,滩肩部位整体堆积,淤高幅度低于50 cm,前滨滩面多为侵蚀,侵蚀幅度低于20 cm,相较于北部海滩,南部海滩侵淤变化更为平稳。
猜你喜欢
连云港文学(2022年2期)2022-05-10
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
高师理科学刊(2020年2期)2020-11-26
国际呼吸杂志(2019年4期)2019-03-12
启蒙(3-7岁)(2018年7期)2018-07-10
环境与生活(2018年10期)2018-05-30
中成药(2017年6期)2017-06-13
工业设计(2016年7期)2016-05-04
现代计算机(2015年31期)2015-09-28