
四轮驱动混合动力汽车模式切换协调控制
2023-03-08 02:21李天景王琨陆从相刘鸿远林兆擎
车用发动机 2023年1期
李天景,王琨,陆从相,刘鸿远,林兆擎
(1.盐城工业职业技术学院汽车与交通学院,江苏 盐城 224005;2.南京工业大学材料科学与工程学院,江苏 南京 210009)
混合动力汽车(Hybrid Electric Vehicle,HEV)既具有纯电动汽车高效率和低排放的优点,又兼具传统内燃机车在动力性和续驶里程方面的优势,从而成为解决当前节能环保问题的切实可行方案[1-3]。但是其在工作模式切换过程中伴随着动力源输出转速和转矩的突变,易导致整车动力输出不平稳,使驾驶性能变差。在保证混合动力汽车节能减排的基础上,通过模式切换协调控制有效提高驾驶性能,具有重要的研究意义[4-5]。
对于上述问题,丰田公司采用行星齿轮机构的动力耦合装置,结合双电机,直接测量发动机实际转矩,较好地解决了不同动力源间的动态协调控制问题[6-7]。江苏大学左言言等、重庆大学罗松[8-9]提出了“发动机动态转矩估计+电动机转矩补偿”的模式切换动态协调控制策略。CANOVA等[10]采用基于模型的控制方法,通过电动机快速响应补偿发动机慢响应,提高了整车驾驶性能。同济大学赵治国等[11]设计了基于混杂系统的无扰动模式切换控制策略。清华大学戴一凡等[12]针对单电机强混合动力系统,提出了“发动机起动过程转矩协调控制/发动机退出过程转矩补偿控制”的动态协调控制策略,取得了较好的控制效果。重庆交通大学李军等[13]依据驱动轮滑模变结构控制算法,制定出目标驱动转矩控制策略。
本研究中的四轮驱动混合动力汽车采用了前后轴双电机的结构,针对该混合动力车辆结构特点,以纯电动向混合驱动模式切换过程为研究对象,开发模式切换协调控制策略,主动控制离合器接合压力使得电机能够实现定转矩补偿,并有效控制发动机转速波动。最后通过台架和实车试验对设计的协调控制策略进行验证。
1 四轮驱动混合动力系统
1.1 基本结构
四轮驱动混合动力汽车动力总成系统基本结构见图1,其中,发动机、前驱电机、CVT变速器、离合器、主减速器采用同轴布置方式连接,用于驱动车辆前轴,后轴则布置有后驱电机和主减速器,形成前轴发动机和前驱电机驱动,后轴电机驱动的四轮驱动混合动力系统。四轮驱动混合动力汽车主要部件选型见表1。

1—前轴;2—前主减速器;3—自动变速器;4—前离合器;5—前驱电机;6—后离合器;7—整车控制器;8—发动机;9—电池包;10—后驱电机;11—后主减速器;12—后轴。

表1 混合动力汽车主要部件参数
1.2 工作原理
车辆行驶过程中前驱电机和后驱电机均可以驱动车辆,同时也可以作为发电机发电和回收制动能量。车辆通过前后离合器的接合与断开以及发动机、电机的不同工作状态实现整车在多种工作模式下运行。车辆工作模式见表2。

表2 四轮驱动混合动力汽车工作模式
2 发动机起动过程转矩协调控制
2.1 车辆动力学分析
在不同的驱动模式下,四轮驱动混合动力汽车不同动力源间转速、转矩关系为
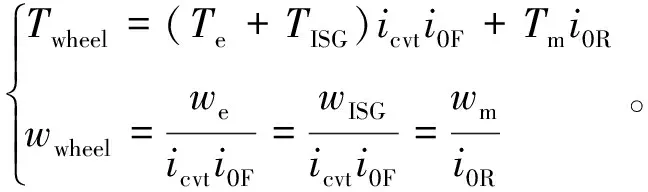
(1)
式中:Twheel为车轮处的总驱动转矩;Te为发动机输出转矩;TISG为前驱电机输出转矩;icvt为自动变速器速比;i0F为前主减速器速比;Tm为后驱电机输出转矩;i0R为后主减速器速比;wwheel为车轮转速;we为发动机转速;wISG为前驱电机转速;wm为后驱电机转速。
当车辆处于纯电动行驶模式时,发动机不参与工作,前离合器处于接合状态,后离合器断开,后驱电机单独驱动车辆,ISG电机保持恒定转速状态,以维持CVT油路润滑。若车辆需要切换至混合驱动模式,此时前后离合器均处于接合状态,在模式切换过程中,需提供额外转矩供发动机起动。
2.2 发动机起动转矩确定
发动机起动转矩需要使发动机在较短的时间内飞轮从静止达到预定转速,以保证发动机正常起动。发动机起动转矩以发动机静态转动阻力矩为基准,同时考虑离合器接合压力和电机转速,其参考函数计算公式如下:

(2)
式中:Tes为发动机静态阻力转矩;J为飞轮转动惯量;t为飞轮从静止达到预定转速的时间;Ts为发动机起动转矩;p为离合器接合压力;n为ISG电机转速。
2.3 离合器接合压力控制
后离合器在模式切换过程中起到传递发动机起动转矩的作用,离合器在接合过程中转矩传递关系可以表示为
Tc=zμcAcpcsgn(Δc)。
(3)
式中:Tc为离合器传递转矩;z为离合器摩擦片数;μc为摩擦片间动摩擦因数;Ac为摩擦片有效面积;pc为离合器压力;Δc为离合器主从动端转速差;sgn为符号函数,当离合器正向接合时函数值取1,当时离合器断开时函数值取0,当时离合器反向接合时函数值取-1。
本研究的控制思路为后离合器在发动机点火输出转矩之前仅传递发动机起动所需转矩,点火输出转矩后,离合器处于完全接合状态,即发动机点火输出转矩之前
Tc=Tes。
(4)
在给定离合器结构参数值均确定的情况下,离合器传递转矩可以通过控制离合器接合压力实现,将式(2)、式(4)代入式(3)可得离合器接合压力为

(5)
离合器接合压力、ISG电机转速以及发动机起动转矩的关系见图2。
2.4 电机补偿转矩
鉴于电机转矩响应快、精度高的特点,发动机起动转矩由电机提供。四轮混合动力汽车前后轴均有电机,其中前驱电机通过后离合器与发动机连接,后驱电机则单独驱动后轴。本研究从降低控制难度的角度出发,选定后驱电机为发动机提供补偿转矩,结合式(1)、式(2),模式切换过程中,在保证车辆正常行驶输出转矩的情况下,后驱电机提供的额外补偿转矩为

(6)
式中:Tms为后驱电机提供的额外补偿转矩。
2.5 发动机转速控制
模式切换要求在尽量短的时间内完成从纯电动到混合驱动的切换,一方面发动机的起动转矩能够使发动机尽快达到起动转速,另一方面发动机的转速应尽快达到稳定值。
而发动机往往具有非线性、多工况、时变时滞等特点,发动机起动过程实际转速与目标转速示意见图3。由图3可看出,发动机在起动时的实际转速波动较大,不能满足模式切换中转速快速跟随的要求。

图3 发动机起动转速示意
比例-积分-微分(PID)控制在不需要确切了解被控对象数学模型的基础上,根据经验调节控制其参数即可取得良好的效果,结构简单,稳定性好。基于此,采用PID控制方法对发动机转速进行控制,控制系统结构图见图4。
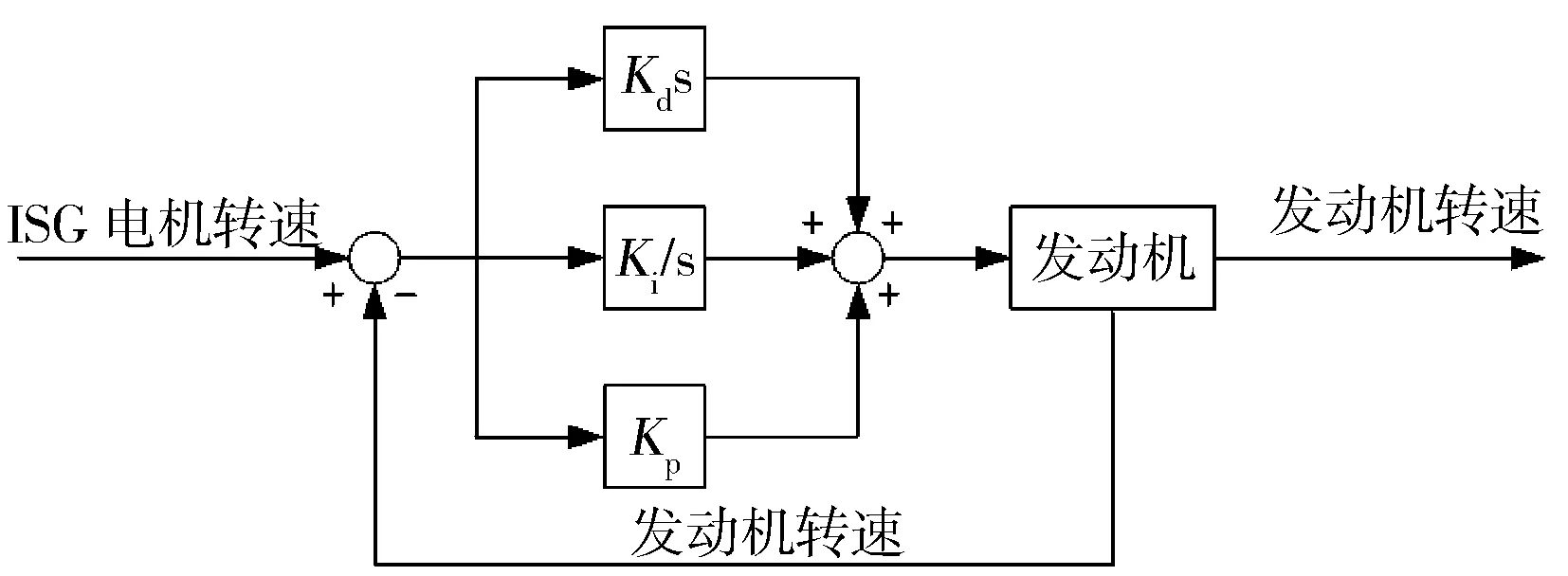
图4 发动机转速PID控制结构
发动机转速PID控制器依据发动机电控节气门开度与转速、转矩之间的关系建立,以前驱电机转速和发动机实际转速误差为输入,发动机转速为输出。图中Kp,Ki,Kd分别为比例环节、积分环节和微分环节参数,其参数值与发动机参数相关,可以通过对发动机实际转速响应特性的分析,实现对上述参数的整定,以达到最优控制效果。控制要素逻辑关系见图5。

图5 控制要素逻辑关系示意
3 台架试验
基于上述设计的模式切换控制策略,利用dSPACE MicroAutoBox构建了四轮驱动混合动力汽车模式切换快速控制原型(Rapid Control System,RCP),并进行了台架试验。试验台架布置见图6。

图6 台架试验布置方案
图6中,发动机、ISG电机、自动变速器以及前后离合器并行布置,形成前轴的动力输出,后驱电机通过转矩耦合装置与自动变速器输出轴并联,使得四轮驱动混合动力汽车的驱动形式在试验台架上得到实现,同时,在转矩耦合装置输出端设置测功机实现对车辆运行工况的监测。RCP作为控制单元,与发动机、ISG电机、自动变速器以及前后离合器实现信号连接,并能够对上述部件实现主动控制,以达到模式切换协调控制的效果。台架试验实物见图7。

图7 台架试验实物图
台架试验选择车辆加速行驶工况,在逻辑门限值能量管理策略的控制下,车辆在某一时刻由纯电动模式切换至混合驱动模式,该过程试验结果见图8。
图8a中阶梯状曲线为车辆驱动模式示意,第一阶段为纯电动,第二阶段为模式切换阶段,第三阶段为混合驱动阶段。由图中可以看出,四轮驱动混合动力汽车加速行驶过程中,处于纯电动模式时,后驱电机单独提供动力,发动机转速为0,ISG电机转速恒定以维持CVT油压;后离合器此时断开,接合压力为0,如图8b所示。在某一时刻进行模式切换后,后离合器接合压力增加,后驱电机提供补偿转矩,通过后离合器传递至发动机,带动发动机转动,当转速达到特定转速(600 r/min)时发动机点火,此时对发动机转速进行PID闭环控制,防止出现较大转速波动,并在很短时间内实现与ISG电机的同步,如图8b、图8c;当发动机与ISG电机实现转速同步后,后离合器压紧,此时接合压力最大。图8a中混合驱动模式中ISG电机转速与发动机转速存在一定转速差,这是由于在信号采集过程中所用传感器不同,实际情况则是在离合器完全结合情况下,两者转速相同。在切换过程中,车辆速度未出现较大波动,加速曲线较为平滑,冲击度小,如图8c所示,表明模式切换过程中未出现较大的转矩波动。

图8 台架试验结果
4 实车试验
为进一步验证设计的控制策略,在台架试验的基础上,进行了实车试验,以四轮驱动混合动力汽车为试验载体,选择某段直行路面,以驾驶员正常驾驶为试验工况,测试过程中重点分析模式切换过程中各部件参数。实车试验见图9。
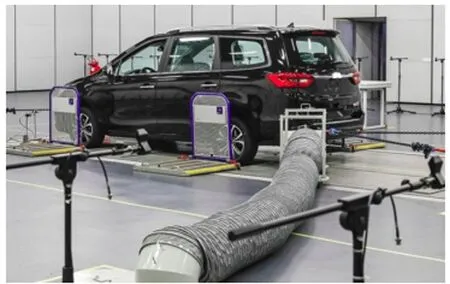
图9 实车转鼓试验图
实车转鼓试验结果见图10。由图10可以看出,当车速为35 km/h时,车辆由纯电动模式切换至混合驱动模式,初始时刻ISG电机转速略有下降,这是由于离合器由断开进入接合状态,离合器接合压力由0切换至定压力,传递起动转矩至发动机,带动发动机转速提升。发动机点火后,其转速会有波动,并会高于ISG转速,此时在PID控制器作用下,转速迅速与ISG电机同步,随后后离合器完全接合,发动机输出转矩,完成模式切换,该过程中发动机起动转矩完全由后驱电机提供。图10c中,模式切换过程中后驱电机转矩下降,这是由于轮边需求转矩减小的缘故,此时后驱电机仍提供发动机补偿转矩。实车试验中,车速曲线较为平滑,表明行驶过程中未出现动力冲击,如图10b所示,进一步验证了控制策略的有效性。

图10 实车转鼓试验结果
5 结束语
针对四轮驱动混合动力汽车,制定了从纯电动模式切换至混合驱动模式的模式切换协调控制策略,搭建了试验台架及实车转鼓试验平台,对该控制策略进行了测试。台架试验和实车试验表明,模式切换协调控制策略能够确保纯电动向混合驱动切换的正常进行,切换过程中车速维持正常,未出现动力冲击。模式切换过程中实现了对离合器接合压力的控制,合理地确定了发动机起动转矩,同时,发动机转速在PID控制下,未出现较大波动,迅速完成与ISG电机的转速同步。
猜你喜欢
石油化工管理干部学院学报(2020年5期)2020-12-14
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
工业设计(2016年11期)2016-04-16
中国火炬(2015年1期)2015-07-25
车迷(2015年6期)2015-03-20
电机与控制应用(2015年3期)2015-03-01
客车技术与研究(2014年5期)2014-02-28
汽车与新动力(2014年4期)2014-02-27
山东农机化(2011年2期)2011-08-15
