
基于语义点云的巡航系统移动目标轨迹识别
2023-03-09 06:56张业徐婧
北京测绘 2023年8期
张 业 徐 婧
(宁波市阿拉图数字科技有限公司,浙江 宁波 315000)
0 引言
自适应巡航系统是当前智能汽车应用的主要系统之一[1],该系统将雷达作为传感装置,采集周边环境信息,扩展司机的感知与识别性能。移动目标轨迹识别是自适应巡航系统的主要应用之一[2-3],能够有效识别周边车辆的行驶轨迹,可用于判断车辆的驾驶意图[3],对于保障汽车行驶安全产生重要影响,因此自适应巡航系统移动目标轨迹识别的研究具有重要意义。
黄士琛等人在研究轨迹识别问题中,构建深度学习模型重建移动目标轨迹,并通过自编码网络提取轨迹特征实现目标轨迹识别[4]。但该方法实际应用过程中未考虑深度学习网络的特征分辨率下降与空间不敏感等现象,由此造成最终的轨迹识别结果存在一定误差。胡春生等人采用图像特征提取方法获取目标图像特征,通过立体视觉技术中的立体匹配算法实现目标轨迹识别[5]。但该方法实际应用过程中直接在图像内提取轨迹特征,未对点云实施语义分割,因此特征提取精度存在一定不足。为此,本文提出了基于语义点云的自适应巡航系统移动目标轨迹识别方法,希望通过该方法为移动目标轨迹识别的研究提供新的方向,并对自适应巡航系统的应用起到积极影响。
1 自适应巡航系统移动目标轨迹识别方法
1.1 自适应巡航系统移动目标点云滤波处理
采用分层自适应移动曲面拟合滤波方法对自适应巡航系统所获取的移动目标点云图像进行滤波处理,具体滤波过程分为以下几个环节。
(1)对移动目标点云图像实施预处理[6],清除粗差点。
(2)采用优化后的均值限差法完成移动目标点云图像粗滤波。
(3)通过Mean Shift算法划分移动目标点云类别[7-8],同时标记类别划分结果。
(4)虚拟格网划分,基于格网内的种子点完成移动目标点云图像次曲面拟合[9]。
(5)设置自适应阈值,实现移动目标点云图像精滤波至遍历全部区域为止。
图1为自适应巡航系统移动目标点云滤波处理流程,该流程以渐进式滤波为基础,通过粗滤波与精滤波两个主要步骤实现自适应巡航系统移动目标点云滤波目的。需要注意的是,环节四中,网格窗口尺寸对于最终滤波性能产生直接影响,因此在实际移动目标点云图像滤波处理过程中,窗口大小的设定非常关键。
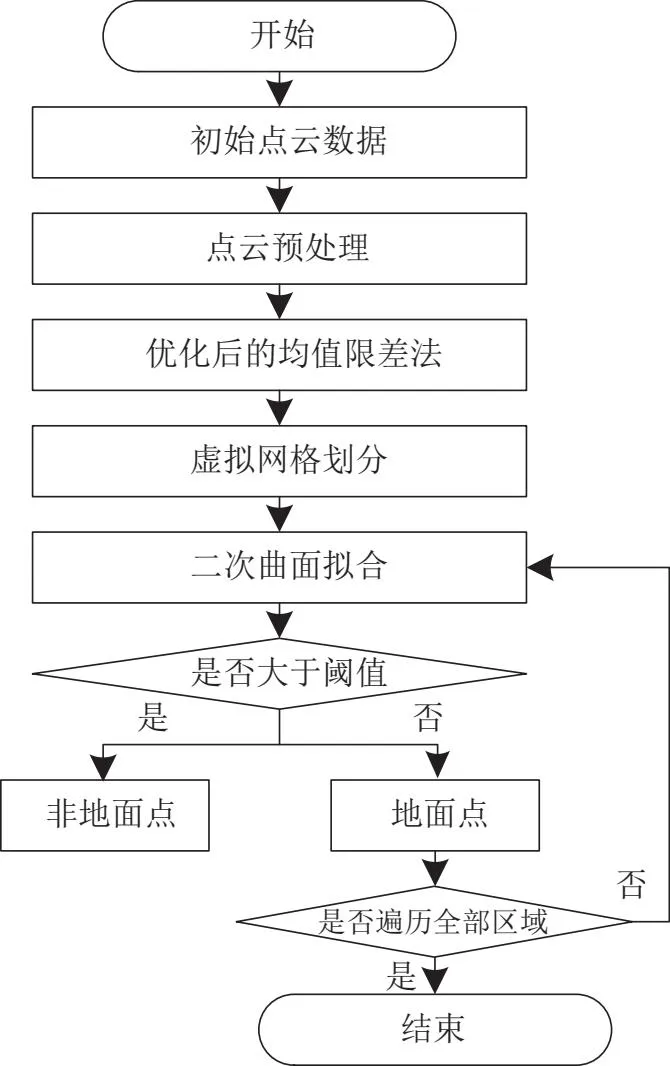
图1 自适应巡航系统移动目标点云滤波流程
环节(2)中,移动目标点云图像粗滤波采用了均值限差法,具体操作过程中将任意点设定为中心,构建窗口,在XY平面上投影窗口内的点,确定除中心点外剩余点云的高程均值,在此基础上确定中心点同均值间的差值,并将结果同阈值相对比,完成移动目标点云图像粗滤波。但数据过程在实际应用过程中会因点云分布的密集度差异造成高程均值不同,降低最终滤波结果的准确性;同时考虑地形具有起伏特性,所设定的不变阈值与窗口尺寸也将降低最终滤波结果的准确性[10]。针对这些问题,可选取变窗口方差比值的方法进行完善。利用式(1)设定窗口尺寸s。
s=(smin)×2n-1
(1)
式中,n表示滤波循环次数。
Dγ和Dλ分别表示窗口内高程均值之上和之下点的方差,确定Dγ和Dλ后计算两者比值,比值大于1、等于1和小于1分别代表与高程均值相比,地面点分布较为密集、较为均匀和较为稀疏。根据比值,利用式(2)所示的动态阈值法优化阈值。
(2)
式中,zc表示初始阈值。
1.2 移动目标点云图像语义分割
对于自适应巡航系统移动目标轨迹识别问题,需要从自适应巡航系统所获取的滤波处理后的点云图像内确定移动目标物体的点云,将这部分包含了移动目标位姿信息的点云与其余图像内的移动目标点云实施高精度配准,即可识别移动目标轨迹。在这一过程中的首要问题即为判断点的类别[11],即确定属于移动目标物体的点,而这一问题可通过语义分割来解决。语义分割的主要目的是划分移动目标点云图像内不同点的类别,由此检测并分割移动目标点云图像内任意或多个目标。语义分割过程可通过深度卷积神经网络来完成,但考虑语义分割具有稠密预测的特征[12],标准的深度卷积神经网络在实际应用过程中存在特征分辨率下降与空间不敏感等现象,因此可从以下三方面优化深度卷积神经网络,更好地实现移动目标点云图像的语义分割。
(1)利用空洞卷积提取稠密特征并扩展视野。移动目标点云的语义分割需根据大量空间位置信息实现点的分类[13-14]。为了避免空间信息丢失问题,可在深度卷积神经网络内引入包含一个扩张因子卷积处理的空洞卷积。针对一维卷积来说,以x和y分别表示一维输入信号和空洞卷积输出,l和c分别表示滤波器和长度,则
(3)
空洞卷积具有辅助控制计算移动目标点云特征响应分辨率的功能[15],同时带洞卷积结构并不密集,在感受野一致的条件下具有更少的参数,能够显著提升移动目标点云语义分割的效率。
(2)通过全连接条件随机场精确提取边界。一般情况下,条件随机场的主要功能是实现图像平滑和降噪。针对移动目标点云语义分割,各点位置i具有隐变量(即实际类别标签)和对应的观测值(即语义划分结果)。以移动目标点云图像内的各点为节点,节点间的相关性作为边,构建条件随机场[16]。经由确定yi判断i对应的xi。条件随机场满足吉布斯分布。
(4)
式中,I表示全局观测。
H(x)表示全连接的条件随机场模型内的损失函数,公式描述如下:
(5)
式中,θi(xi)和θij(xi,xj)分别表示一元损失函数和二元损失函数。
θi(xi)是观测序列位置的状态特征函数,能够反映观测序列对标记变量的影响,公式描述如下:
θi(xi)=logP(xi)-1
(6)
式中,P(xi)表示关于i的输出标签分配概率。
θij(xi,xj)所描述的是不同观测位置上的转移特征函数,能够反映变量间的相关性以及观测序列对其影响,公式描述如下:
(7)
式中,cn(fi,fj)表示点i、j处特征向量fi与fj间的高斯核。
综合式(6)、式(7)能够得到,通过θij(xi,xj)能够确定移动目标点云图像内各点的一致度。若一致度高于设定的阈值,即可定义各点属于同一类;反之则认为是各点分别属于两个类别。
(3)可分离卷积结构。利用深度卷积神经网络实现移动目标点云语义分割过程中,通过可分离卷积结构Xception降低网络参数数量,也就是通过深度卷积与驻点卷积两个环节共同实现完整的卷积运算[17]。利用上述过程对深度卷积神经网络进行优化后,通过优化后的网络完成自适应巡航系统移动目标点云图像的语义分割,由此将移动目标点云图像内的点云划分为两部分,一部分是移动目标点云,另一部分是背景点云。针对不同场景内的移动目标点云,采用点云配准算法,识别移动目标轨迹。
1.3 移动目标点云配准
1.3.1匹配特征点搜索
在两幅重叠的移动目标点云内提取获取特征点集T1和T2。ti表示T2内的任意点,通过计算确定ti的高斯曲率与曲率均值,并生成属性序列Stz(Ki,Hi),确定ti在T2内的匹配点。详细匹配点搜索过程如下:
(1)根据T1,T2与点云内各点处的高斯曲率与曲率均值确定该点属性序列st1i、st2i(i=1,2,…,n1;j=1,2,…,n2,n1与n2分别表示T1和T2内点的数量)。
(2)针对T1内各点对应的属性序列st1i,通过式(8)分别确定T2内各点的属性序列st2i与st1i的Tonimoto系数(相似度函数)T1i。
(8)
式中,A和B分别表示量特征点属性向量。
(3)确定T1i的下限值,如果其低于阈值ε,那么对应的特征点对即为匹配点对;如果不存在低于ε的点对,那么搜索T1内后续点匹配点至T1内全部点在T2上的匹配搜索结束为止。
(4)将所确定的T1和T2内匹配的点对作为最终的配准点对,由此确定移动目标点云旋转矩阵R与平移矩阵G。
基于不同场景内的点云配准结果获取移动目标轨迹。
2.3.2点云配准

(9)
对语义分割所获取的移动目标点云实施逆变换处理后,在完成高精度的点云配准,能够快速获取点云的旋转与平移结果R′、T′。
2 实验结果与分析
为验证本文所研究的基于语义点云的自适应巡航系统移动目标轨迹识别方法的实际应用性能,以汽车上搭载的某自适应巡航系统为研究对象,采集研究对象内部点云图像作为测试图像集,采用本文方法对测试数据集内的移动目标进行轨迹识别测试。研究对象中采用一家德国汽车雷达生产制造商IBEO激光雷达获取移动目标点云图像,表1所示为IBEO激光雷达的相关技术参数。

表1 点云获取的相关技术参数
2.1 滤波性能评价
在测试数据集内随机选取三幅点云图,采用本文对其进行滤波处理。为分析本文方法的滤波性能,选取国际普遍认可的滤波误差定量评价标准,如表2所示,基于该标准,评价本文方法滤波性能,所得结果如图2所示。分析图2可知,采用本文方法对所选测试图像进行滤波处理时,三类误差均控制在4%以下,其中二类误差与其他两种误差相比均较高。以上数据说明本文方法在滤波方面具有较高的滤波精度,同时稳定性也较好。
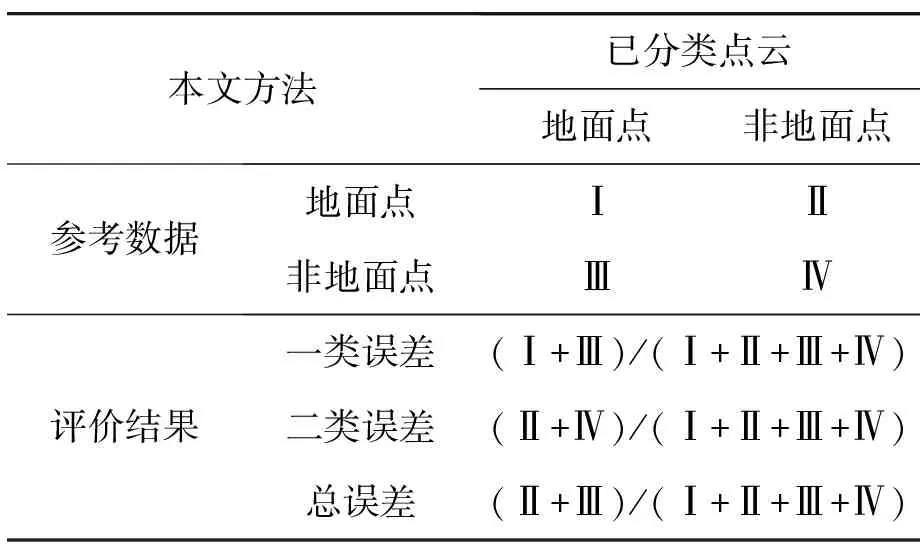
表2 滤波误差定量评价标准
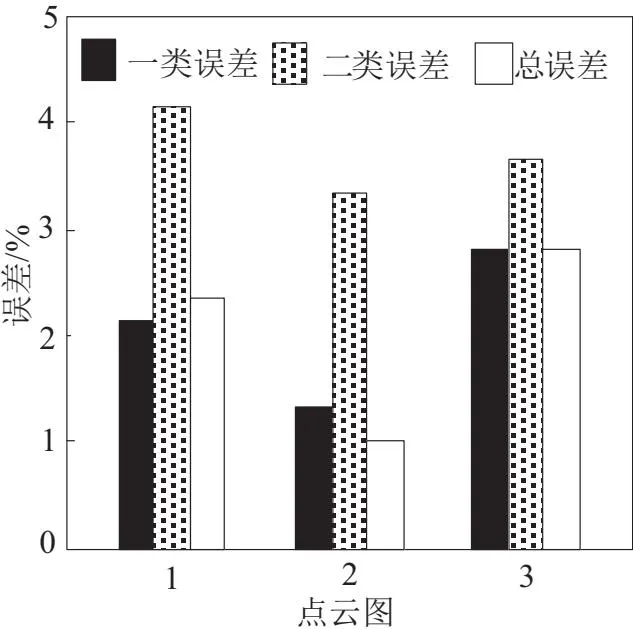
图2 滤波性能评价结果
2.2 语义分割性能测试
针对上一实验所选的三幅点云图,图内移动目标在行驶过程中均未发生遮挡问题,采用本文方法对其进行语义分割测试,图3为本文方法点云语义分割测试结果。分析图3可知,采用本文方法对移动目标进行语义分割时,在不同的距离条件与光源条件下均能够有效实现点云类别的划分,准确获取移动目标点云,有利于提升移动目标轨迹识别精度。
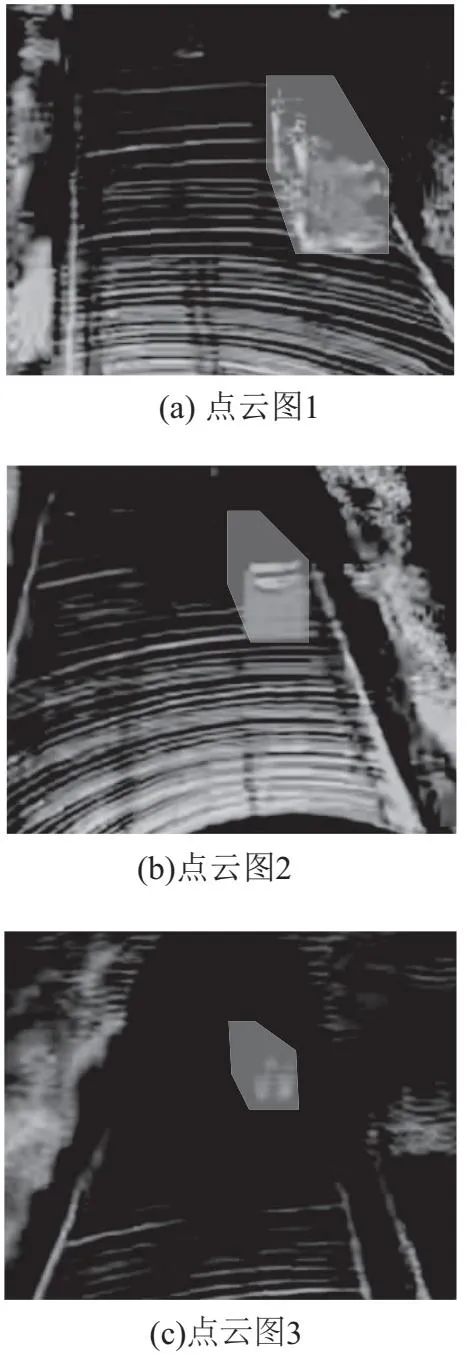
图3 语义分割测试结果
2.3 点云配准测试结果
以中心位置误差(用于反映分割出的移动目标点云区域同实际移动目标点云区域的中心偏差),与覆盖率(用于反映分割出的移动目标点云区域同实际移动目标点云区域合并部分内的重叠比例)为测试指标,客观分析本文方法的点云配准性能,所得结果如图4所示。分析图4可知,本文方法在点云语义分割过程中,中心位置误差控制在15像素以内,而覆盖率则始终保持在85%以上。由此说明本文方法具有较好的语义分割效果。
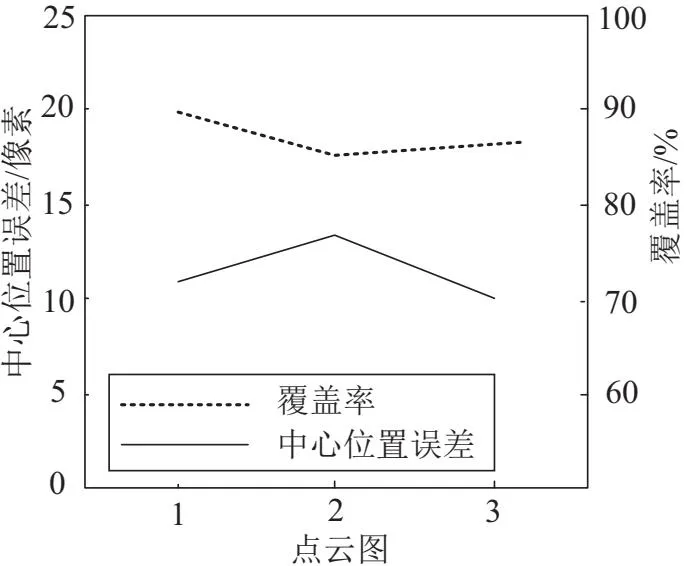
图4 点云配准测试结果
2.4 轨迹识别测试
以点云滤波与语义分割结果为基础,采用本文方法识别不同移动模式下的移动目标轨迹,所得结果如图5所示。分析图5可知,在目标基本沿着直线移动的条件下,本文方法识别出的移动目标轨迹同其实际移动轨迹完全重合。在目标基本沿着曲线移动的条件下,本文方法识别出的移动目标轨迹同其实际移动轨迹大致重合,仅在小角度转弯区域所得的轨迹具有一定误差,但误差较小。由此说明本文方法能够准确识别移动目标轨迹。
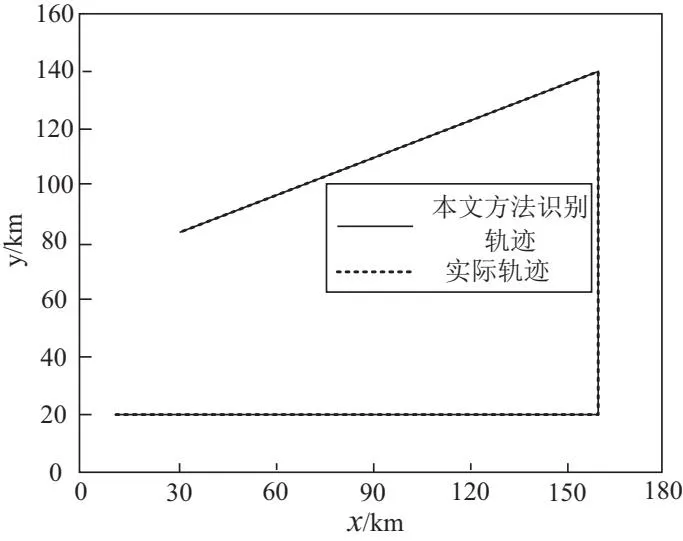
(a)直线轨迹
为了进一步验证本文方法的实用性,分别采用本文方法与文献[3]、文献[4]方法对巡航系统移动目标轨迹进行识别。以轨迹识别精准度作为指标,实验具体结果如图5所示。
分析图6可知,使用本文方法对巡航系统移动目标轨迹识别的准确率均为95%以上,文献[4]方法的准确率为87%~92%,而文献[5]方法的识别准确率为85%~94%。本文方法的准确率明显高于其他两种方法。
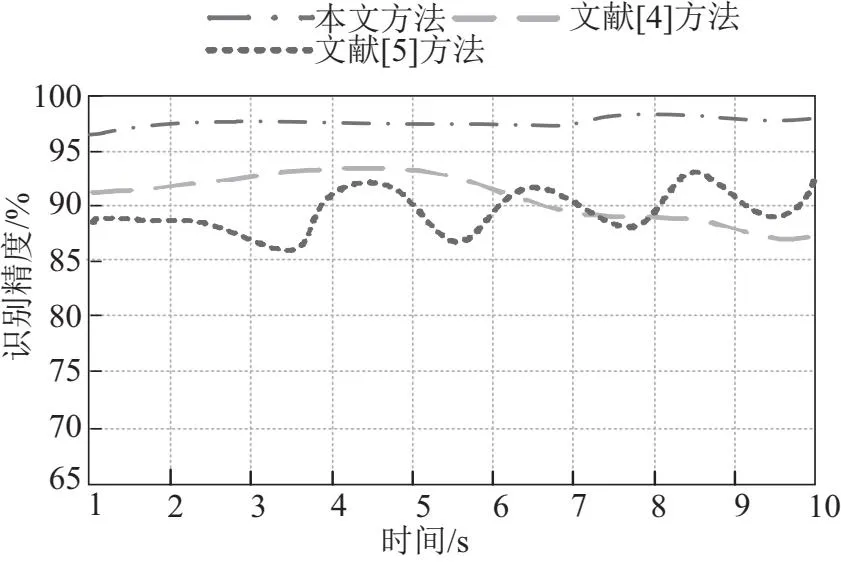
图6 目标轨迹识别精度
为了进一步验证本文方法的可行性,选取识别时间作为指标,识别时间越长效率越低,识别时间越短效率越高。分别采用本文方法与文献[3-4]方法对巡航系统移动目标轨迹进行识别。实验具体结果如表3所示。

表3 移动目标轨迹识别时间 单位:s
分析表3可知,相比其他两种方法,本文方法在进行巡航系统移动目标识别时的识别时间最短识别效率最高,识别时间仅需26 s。
综上,可以得出本文方法具有较高的精确度及识别效率,更具实用性和可行性。
3 结束语
本文提出了基于语义点云的巡航系统移动目标轨迹识别方法,引用滤波技术、语义分割技术与点云配准技术等实现自适应巡航系统移动目标轨迹识别。实验结果显示,本文方法具有较好的应用性。但由于时间与技术所限,本文方法在实际研究过程中还存在一定不足,如测试过程中所识别的移动目标均为完整目标,对于处于遮挡状态下的移动目标轨迹识别性能未进行测试。因此在后续优化过程中,将针对这部分内容进行详细测试,并根据测试结果完善本文方法。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
开放教育研究(2020年2期)2020-03-31
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
现代语文(2016年21期)2016-05-25
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
大连民族大学学报(2015年2期)2015-02-27
电子设计工程(2014年20期)2014-02-27
