
ROV 在海上风电水下检查和施工辅助决策中的应用与研究
2023-03-15 08:15李长雁高梦雪
陕西水利 2023年2期
代 鑫,彭 望,赵 旭,李长雁,高梦雪,王 月
(1.国能大渡河流域水电开发有限公司,四川 成都 610000;2.中国电建集团昆明勘测设计研究院有限公司,云南 昆明 650033)
1 引言
海上风电是我国目前主要的能源之一。当今海上风电工程建设大多采用钢结构作为承重结构,有些钢结构高度高、体型大,且大多位于水下,对其施工或运行维护质量很难掌控,所以在工程施工阶段或运行维护阶段对海上风电钢结构的表观缺陷的水下检查越来越受到工程师们的关注。水下无人潜航器,又称ROV,可以代替潜水员潜到水下,从而降低人员的安全风险。传统的人工潜水摄像摸查技术在海上风电站的建设包括施工、检修、维护等任务,该项作业不仅危险,且工作效率较低,无法保障检测成果质量和作业安全。
本文以揭阳神泉一海上风电水下检测项目实例为依托,基于“光学为主、声学定位”的检测思路,展示了声呐系统和水下无人潜航器技术联合开展海上风电工程施工及运行维护水下检测典型成果,完成了导管架插桩水下无人潜航器监测辅助施工,查明了某风机牺牲阳极运行现状,为海上风电工程施工与运行维护水下检测提供了可靠的解决思路。
2 检测技术及原理
传统海上风电水下施工与运行维护以人工潜水摄像摸查为主,特别是在半潜式工作船施工中较为危险且工作效率较低,作用有限,无法开展正常检测作业。水下无人潜航器(Remotely Operated Vehicle,简称ROV),作为能够在水下环境中长时间作业的高科技装备,尤其是在潜水员无法承担的高强度水下作业和危险条件下更显现出其明显的优势[1]。在海上风电水下施工与运行维护“光学为主、声学定位”检测思路中,光学主要通过ROV 搭载水下高清摄像头、灯光获取海上风电水下结构影像实现,声学主要利用声波反射原理获取回声信号图像,根据回声信号图像分析获取水下结构的高分辨率回声信号图像[2]。二维图像声呐是一种主动式实时探测设备,通过声波反射原理获取目标回声信号并实时显示,相较光学摄像易受水体浑浊及流速影响造成图像模糊变形,无法准确获取缺陷信息的情况,水下无人潜航器搭载二维图像声呐对水工建筑物缺陷进行检测可极大程度地减少水体能见度及水体扰动对检测成果造成的干扰[3-4]。
在海上风电水下施工干预施工与运行维护检查中,针对检查目标,采用ROV 搭载二维图像声呐对目标进行精确定位后,ROV 搭载水下高清摄像头、灯光抵近目标进行高清摄像监测辅助施工检查。
3 应用与研究
3.1 工程概况
揭阳神泉一海上风电场位于广东省揭阳市神泉镇南面海域,场区涉海面积约64 km2,外围风机包络海域面积约为8.5 km2,水深范围33 m~39 m,中心离岸距约26 km,项目规划装机总容量为400 MW,布置29 台上海电气7 MW 风电机组,同时配套建设1 座220 kV 海上升压站和1 座陆上集控中心。风电机组发出的电能通过35 kV 集电海底电缆接入海上升压站。本实例中风机单桩牺牲阳极水下检查属于运行维护检查,位于水下15 m 左右;导管架插桩属于施工过程中的ROV 监测辅助施工,位于水下20 m。本实例中水下检测环境属于典型的海上风电施工ROV 水下检查工程。几年前,导管架的检测任务,主要由潜水员完成。但是随着导管架检测内容的多样化,加上作业环境上的风险性,很多检测任务潜水员无法完成,只能依靠 ROV(Remoted Operated Vehicle),即为水下机器人来完成。因此 ROV 在导管架检测中承担着越来越重要的角色[5]。
3.2 牺牲阳极水下检查
牺牲阳极水下检查时采用声学和光学联合开展检查工作,主要采用深度计、罗经、声呐等多种方式进行联合定位,通过深度计确定ROV 的深度,罗经、声呐确定牺牲阳极的位置,到达牺牲阳极位置后,以塔阀门方向为原点,对6 个牛腿进行编号。沿顺时针方向对牺牲阳极进行光学摄像检查,检查完01、02、03号牛腿的连接情况后返回原点,再从原点开始,沿逆时针方向对牺牲阳极进行光学摄像检查,检查04、05、06 号牛腿连接情况。检查测线布置见图1。
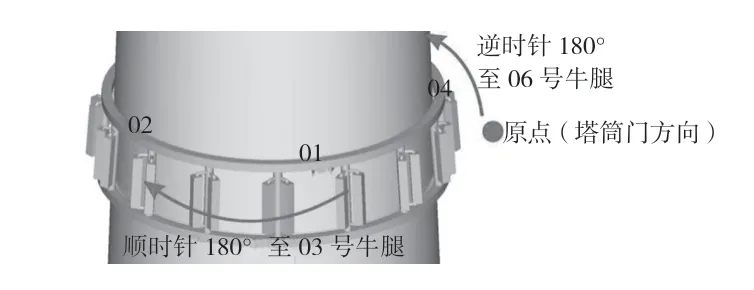
图1 牺牲阳极水下检查现场测线布置
ROV 搭载二维图像声呐系统对风机单桩牺牲阳极进行精确定位成果见图2(a),发现目标物距ROV 3 m 距离,ROV 搭载高清摄像头、深度计,罗经等对牺牲阳极抵近摄像成果图像见图2(b),牺牲阳极牛腿光学摄像检查成果见图3,检查发现牺牲阳极牛腿连接到位,未见异常。可见通过采用ROV搭载声纳系统及高清摄像头、深度计,罗经等传感器在海上风电项目开展水下检测获取水工建筑物水下分布信息、开展缺陷损伤部位的初步检测是可行的。

图2 揭阳神泉一海上风电风机牺牲阳极水下检查成果图像

图3 揭阳神泉一海上风电风机牺牲阳极牛腿光学摄像检查成果图像
3.3 导管架套管插桩水下监测辅助
导管架套管插桩水下监测辅助主要采用声学和光学联合开展检查工作,主要采用深度计、罗经、声呐等多种方式进行联合定位,ROV 到达导管架套管口位置后,通过深度计判断单桩所在的深度,罗经、声呐观察单桩的位置和距离,引导单桩到达导管架套管口位置,之后采用ROV 搭载高清摄像头对导管架桩基套管口极抵近摄像辅助,并和吊放人员进行实时通讯,调整吊放距离和角度,最终引导单桩插入导管架套管。
ROV 搭载二维图像声呐系统对导管架套管口进行精确定位成果见图4(a),发现目标物距ROV 2 m 距离,ROV 搭载高清摄像头、深度计,罗经等对导管架套管口抵近摄像辅助成果图像见图4(b)。ROV 监测辅助施工成果见图5。可见通过采用ROV 声纳系统及搭载高清摄像头、深度计,罗经等传感器在海上风电项目开展ROV 水下监测辅助施工的方法是可行的。
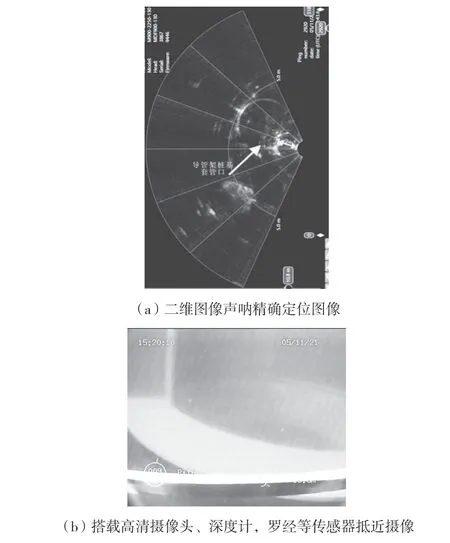
图4 揭阳神泉一海上风电导管架套管插桩水下监测辅助成果图像

图5 揭阳神泉一海上风电导管架ROV 监测辅助施工成果成果图像
4 结论
本文依托揭阳神泉一海上风电水下检查项目实例,基于ROV 在海上风电施工项目中的的“光学为主、声学定位”检测思路,查明了某风机单桩水下牺牲阳极的运行现状和完成了导管架套管插桩施工的ROV 水下监测辅助施工。主要结论如下:
1)联合二维图像声呐系统、水下无人潜航器开展海上风电工程的ROV 水下监测辅助施工和运行维护检查是有效可靠的;
2)相较于人工潜水水下摸查,ROV 水下检查与监测辅助施工的技术方法缩短了检测时间,降低了检测成本与作业风险,提高了检测覆盖范围与适用性,在实际工程应用中取得了良好的效果,具有一定的推广应用意义。
猜你喜欢
化工管理(2022年14期)2022-12-02
海洋石油(2021年3期)2021-11-05
建材发展导向(2021年7期)2021-07-16
化工管理(2021年7期)2021-05-13
陶瓷学报(2021年1期)2021-04-13
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
能源(2018年8期)2018-01-15
风能(2016年12期)2016-02-25
