
输电线路障碍物清理机器人刀具系统自抗扰控制
2023-03-15 02:48张秋雁许昌亮曾华荣杨忠陈科羽廖禄伟李捷文徐浩
广东电力 2023年2期
张秋雁,许昌亮,曾华荣,杨忠,陈科羽,廖禄伟,李捷文,徐浩
(1.贵州电网有限责任公司电力科学研究院,贵州 贵阳 550002;2.南京晓庄学院 电子工程学院,江苏 南京 211171;3.南京航空航天大学 自动化学院,江苏 南京 211106;4.贵州电网有限责任公司输电运行检修分公司,贵州 贵阳 550002)
输电线路障碍物是威胁输电线路安全的主要因素之一,最常见的输电线路障碍物为各种附着于输电线路上的漂浮物。该类障碍物给电网运营带来显著安全威胁。因线路障碍物引发相间短路、相地短路而导致的停电事故时有发生,对经济生产、科学研究和国民生活带来严重影响,造成的经济损失难以估计[1-2]。为此,线路障碍物清理成为必要工作,以确保电网工作正常。目前的清理工作主要采用人工作业方式,此方式效率较低、人工成本高,且无法保障操作人员的安全。
针对以上问题,本文提出一种使用空中机器人平台搭载清理刀具系统来进行障碍物清理作业的清障思路。近年来,以无人飞行器为载体的作业型机器人逐渐受到更多学者关注。作业型机器人[3-5]通过携带作业机构对所处环境施加主动影响来完成特定任务,但尚未见用于高压线路异物清除领域。2017年国网苏州供电公司研制了一种使用火烧清除方式的高压输电线路异物无人机清除装置。
调研中发现,现有的几类输电线路异物清理机器人存在如下问题:
a)地面部署的清理作业机器人普遍设备体积较大,部署时受到地形的限制,整体作业效率不高,且带电作业的防护措施要求更高。
b)爬线方式的清理作业机器人对多股高压导线的适应性不足,难以实现快速上下线路,因而部署不方便,能源更换或补充严重受限,可行性不高。
c)对可飞行的清理作业机器人的研究较少,面向的障碍物种类较为单一,缺少接触类型清障作业方案;此外,喷火除异物机器人还存在着明显的安全隐患,如导线高温受损和未燃尽异物飘落易引发次生火灾。
受上述研究工作的启发,提出一种输电线路障碍物清理机器人。使用此种方式进行清理任务不仅可以提高清障效率,而且能保障操作人员的安全。作为空中机器人的执行机构,刀具系统的性能至关重要。为保证刀具系统高效、平稳作业,要对刀具系统的控制性能要求较高。然而,刀具系统存在参数摄动,且在清理作业时存在负载转矩扰动,传统控制方法难以达到系统对于控制性能的需求。
刀具电动机为刀具系统的核心部件,针对无刷直流电动机系统的参数摄动和外界扰动问题,国内外学者提出了不少解决方法。适应性强是模糊控制的特点,精度较高是比例积分微分(proportion integration differentiation,PID)控制的优势,文献[6]将这二者结合起来,在线更新控制器的参数,提高了控制系统的抗扰性能;但该控制器的模糊控制规则设计较为复杂。文献[7]提出一种基于神经网络的PI控制方法,神经网络通过梯度下降法在线整定PI控制器的参数,有效提高了系统对于参数摄动的适应能力;但神经网络控制方法在实际应用时对控制器处理器的计算速度要求较高,硬件实现存在门槛。文献[8]引入模型参考的思想,并应用于自适应控制,采用popov理论设计自适应律,实现对给定值的有效跟随,且提高了系统的自适应能力;但自适应控制方法存在对系统负载快速变化过于敏感的缺点。文献[9]采用滑模控制来解决无刷直流电动机的控制问题,为了提高控制效果,设计了一种指数趋近律,取得了较好的抗扰性能和鲁棒性;但滑模控制方法的抖振问题没有得到解决。文献[10]设计了2个一阶自抗扰控制(active disturbance rejection control,ADRC)控制器,提高了无刷直流电动机系统的抗扰性能和鲁棒性;但ADRC在设计和实现的过程中涉及到的参数较多,调节过程复杂,增加了实际工程应用的难度。
在控制理论研究进程中,不论是理论研究[11-14]还是工程实现方面[15-18],基于自抗扰思想的控制研究成果持续出现。常规的非线性自抗扰控制(nonlinear ADRC,NLADRC)存在较为明显的不足,即有效且成功运行的控制器内需要整定的参数较多,在实际工程应用中参数调节的过程很复杂。为此,文献[19]讨论了一种基于带宽的ADRC方案,实现了线性思想的自抗扰控制。为有效提高刀具系统对清障作业时负载转矩扰动的抑制能力和对系统参数摄动的适应能力,同时简化刀具控制系统的参数整定工作,本文提出了刀具系统的线性自抗扰控制(linear ADRC,LADRC)方法。
首先,介绍异物清理机器人系统的整体结构以及刀具系统的组成;接着,根据刀具系统的运行机理和清障作业的扰动分析,建立在切割作业扰动条件下的刀具系统二阶状态方程;然后,确定具有线性特点的ADRC控制律,并通过数学方法证明所采用的线性扩张状态观测器(linear extended state observer,LESO)的收敛性和ADRC方法的稳定性;最后,通过仿真实验和物理实验对所设计的LADRC控制器的控制效果、鲁棒性和抗扰动性能进行验证。
1 刀具系统组成及数学模型
输电线路障碍物清理机器人通过其机身下方的机械臂带载刀具系统进行输电线路障碍物清理任务,整个机器人系统如图1所示。刀具系统与清理机器人之间存在通信链路和供电系统的连接,电气线要从机械臂中穿过,因此刀具系统与机械臂之间的接口要综合考虑机械和电气2种方式,以实现刀具系统的快速更换。

图1 高压线障碍物清理机器人系统示意图
本文研究的刀具系统的应用背景是安装在高压输电线路障碍物清理机器人本体上,在研发过程中需要考虑机器人在高压线附近强电磁环境下的电磁兼容问题,采取的对策是在机器人的电路板和信号线周围设置屏蔽层。
1.1 刀具系统组成
刀具系统主要由刀具架、刀具电动机和圆盘锯及刀具系统控制器组成,如图2所示。考虑到圆盘锯质量轻、结构简单和易于驱动的优点,刀具系统选用圆盘锯作为清障作业的刀锯。圆盘锯采用无刷直流电动机驱动,电动机的螺丝轴与圆盘锯的盘锯夹通过螺纹锁定的方式连接并安装于刀具架的前部,刀具架上下板采用碳纤维材料。为了使清障作业时待切割障碍物能快速进入刀具系统的有效切割范围,设计了安装在刀具架下板前部的导向结构。刀具系统控制器放置于刀具架内部,通过螺钉与刀具架固连。刀具控制器上有转速和电流传感器模块,获取到的转速和电流信息可用来检测刀具系统的作业状态。

图2 刀具系统
1.2 刀具系统数学模型
刀具系统的驱动电机选用的是无刷直流电动机。刀具电动机的三相绕组采用Y型连接方式,其调速方法通过脉宽调制(pulse width modulation,PWM)来实现调制。为了简化分析过程,对刀具系统作如下几点假设:①忽略电动机电枢反应,将气隙磁场和反电动势均视为理想梯形波;②忽略刀具系统的电动机无齿槽效应,刀具系统电动机电枢上的导体遍布是理想均匀状态;③不计电动机铁芯饱和,忽略电动机损耗和杂散损耗;④系统电子元器件的开关特性处于理想状态。
刀具电动机的相电压可以分为2个部分,一部分是电阻产生的压降,另一部分是来自绕组的感应形成的电势,结合磁链、磁通等关系式,可推导出三相绕组电压平衡方程为
(1)
式中:ua、ub、uc为刀具电动机的相电压(V);r为相电阻(Ω);ia、ib、ic为相电流(A);ea、eb、ec为刀具电动机相绕组感应电势(V);L为刀具电动机的各个相绕组产生的自感(H),M为两相绕组间形成的互感(H);D为微分算子。
在每个时刻只有两相导通,假设绕组电流在换相过程中产生的波动微小到可以不计,同时系统二极管工作时的压降和续流也均可省略,则系统电路的电压可表示为
(2)
式中:ue为电动机等效端电压;iP为相电流;t为时间;r′为相电阻,r′=2r;L′为相电感,L′=2L;Ω为系统角速度(rad/s);ke为反电势系数。
系统转矩平衡方程为
(3)
式中:Te为电磁转矩;TL为负载转矩(N·m);J为刀具系统的转动惯量(kg·m2);Bv为粘滞摩擦系数。
电磁转矩方程又可以写为
Te=kTiP.
(4)
式中kT为转矩系数。
由式(2)—(4)可得
ue=
(5)
在刀具系统进行清理作业时,圆盘锯会对被切割障碍物产生切削力作用,该切削力会反作用于刀具系统,从而在刀具系统上叠加一个负载转矩。由于圆盘锯在切削作业时切削力的大小未知,因此将切削力所产生的负载转矩视为系统的外界扰动。
根据上述描述可知在负载转矩扰动条件下的刀具系统二阶状态方程为
(6)

2 刀具系统LADRC方法


图3 刀具系统LADRC原理
2.1 LESO与控制律设计

(7)

刀具系统的LESO为如下形式:
(8)
式中li(i=1,2,3)为可调参数。
刀具系统的线性自抗扰控制律
(9)
(10)
(11)
式中kL1、kL2为线性化指数。
2.2 刀具系统LADRC的稳定性分析
为证明刀具系统LADRC的稳定性,首先要分析LESO的收敛性。
2.2.1 LESO收敛性分析
由2.1节可知,li(i=1,2,3)是LESO的可调参数,li(i=1,2,3)取值方式为[11]:

(12)

(13)

(14)



(15)
式中τ为积分变量。

(16)

(17)
因此有
(18)
对于所有的t≥T1,i=1,2,3,
(19)
成立。令εsum(0)=|ε1(0)|+|ε2(0)|+|ε3(0)|,对于所有的t≥T1,i=1,2,3,有
(20)
由式(15)可得
(21)

(22)
式中υi为系统变量变化率。对于所有的t≥T1,i=1,2,3,式(22)均成立。
综上,在h(x,ω)有界的条件下,刀具系统LESO的估计误差有界,且其上界随LESO的带宽单调递减。
2.2.2 线性自抗扰稳定性分析
定义ei=ri-xi,i=1,2,由式(9)可以得到
(23)
然后可得:
(24)
式中u为控制输入量。

(25)

解式(25)可得
(26)
根据式(25)和2.2.2节的清理机器人LESO收敛性分析得到的结论,有:
(27)



(28)
且有:
(29)
式中k1为带宽常数。由于Ae是Hurwitz矩阵,因此存在一个有限时间T2>0,对于所有的t≥T2,i,j=1,2,都满足
(30)
令T3=max{T1,T2},对于任意的t≥T3,i=1,2,可以得到
(31)
继续推导可得到
(32)
由式(28)、(29)和(32)的推导,对所有的t≥T3,有
(33)
令es(0)=|e1(0)|+|e2(0)|,则对于所有的t≥T3,有
(34)
由式(26)可得:
|ei(t)|≤|[eAete(0)]i|+|ϑi(t)|.
(35)
由式(27)、(33)—(35)可得,对于所有的t≥T3,i=1,2,有
|ei(t)|≤
(36)
在h(x,ω)有界的条件下,清理机器人刀具LADRC闭环的跟踪误差是有界的,且增大控制律带宽ωc可减小误差的上界。刀具系统LADRC只有2个参数需要调节,因此使用LADRC方法可大大简化参数整定工作。
3 仿真实验
为验证本文设计的刀具系统LADRC方法的效果,在MATLAB/Simulink环境下进行仿真实验。
3.1 仿真实验
在仿真环境下搭建了树障清理机器人刀具控制系统仿真模型,刀具系统仿真参数见表1。

表1 刀具系统仿真参数

表2 LADRC仿真参数

表3 NLADRC仿真参数[20]
3.1.1 阶跃响应实验
为验证本文所提清障机器人刀具系统LADRC方法的性能,进行刀具系统的阶跃响应实验。给定值设为3 000 r/min的阶跃信号,控制参数见表2、表3,仿真实验结果如图4所示。由图4可知,LADRC动态响应快速且只产生了很小的超调量,与NLADRC的性能相近。

图4 LADRC阶跃仿真曲线
3.1.2 抗扰测试实验
为验证刀具系统的抗扰能力,进行抗扰测试仿真实验。刀具系统进行清理任务时,不同种类障碍物的质地条件存在差别。本文针对质地均匀、质地均匀变化和质地杂乱变化3种不同质地条件的障碍物,设计了3种对应的切割作业负载转矩扰动信号,分别为常值扰动信号、正弦负载扰动信号和随机负载扰动信号,仿真实验按照上述3种扰动信号的形式进行。
a)设定值取3 000 r/min,1 s时在系统中加入转矩为0.3 N·m的常值干扰,并在2 s时去除此常值干扰,仿真实验结果如图5所示。由图5可知:常值扰动加入系统之后,刀具系统转速在产生变化之后迅速恢复到设定值并稳定地维持在设定值;LADRC与NLADRC性能相近。
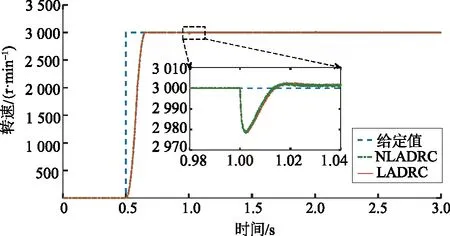
图5 常值扰动下的LADRC抗扰实验曲线
b)设定值取3 000 r/min,1 s时在系统中加入正弦负载转矩(0.2+0.1sin(10πt))N·m,并在2 s时去除此正弦负载转矩,仿真实验结果如图6所示。由图6可知:在向系统加入正弦负载转矩扰动时,系统能够较快地恢复至设定值,且能够保持良好的转速控制性能;LADRC与NLADRC控制性能接近。

图6 正弦扰动下的LADRC抗扰实验曲线
c)设定值取3 000 r/min,1 s时在系统中加入随机负载扰动信号(0.2+rand(0,0.1))N·m,并在2 s时终止此扰动信号,仿真实验结果如图7所示。由图7可知:系统受到随机负载扰动时能够快速恢复至设定值,且保证转速小范围变化的稳定状态;LADRC与NLADRC方法有着相近的性能。
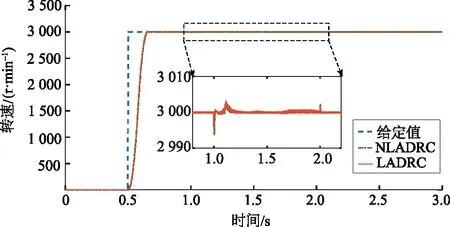
图7 随机扰动下的LADRC抗扰实验曲线
3.1.3 鲁棒性测试实验
为验证LADRC对刀具系统参数摄动的适应能力,进行鲁棒性测试实验。改变系统中容易发生摄动的电阻、转动惯量和转矩系数,在不同的参数条件下(见表4)分别进行仿真实验[21-22],结果如图8所示。由图8可知,在不同参数条件下,系统动态性能几乎没有变化,各仿真曲线之间只有终值存在较小的差异,说明LADRC方法对刀具系统参数摄动有很强的适应能力。
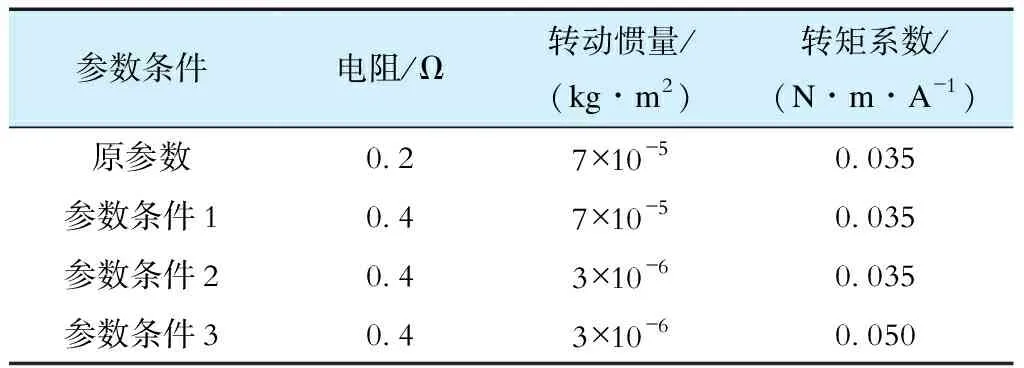
表4 LADRC仿真参数条件

图8 LADRC鲁棒性测试实验曲线
3.1.4 仿真计算时间
为了验证LADRC方法的计算性能,对比LADRC与NLADRC方法下的几组实验仿真持续时间,如图9所示。本文仿真实验的计算机硬件环境为搭载英特尔酷睿i7-12700H、主频2.7 GHz的中央处理器,内存32 GiB,硬盘容量512 GiB。从实验结果来看,LADRC展现了强大的计算复杂度优势。

图9 各实验仿真持续时间对比
本文仿真搭建的模块中包含被控对象的模型,需要占用一定的计算时间,因此实际上控制算法部分的计算时间比仿真持续时间更短。
3.2 物理实验
根据论文对象的研究背景和算法验证需求,搭建了一套硬件系统。该系统采用型号为STM32F405的进阶精简指令集机器(advanced risc machine,ARM)计算机,并配有刀具转速和电动机电流传感检测模块。
首先进行刀具系统地面切割作业实验,切割对象是直径约42 mm的香樟树枝,实验曲线如图10所示。由图10可以看出,在存在清障作业负载扰动工况下,本文所设计的自抗扰刀具系统具有良好的转速跟踪性能,且可以保证清障作业效率。
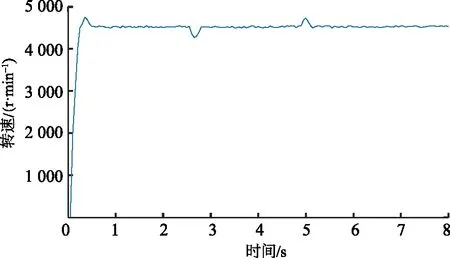
图10 刀具系统地面切割实验曲线
4 结束语
本文提出了一种高压强电磁环境下输电线路障碍物清理遥控作业机器人刀具系统的LADRC方法。首先介绍清障机器人刀具构成,并推导了刀具系统的二阶状态方程。针对刀具系统存在参数摄动、切割作业时存在负载转矩扰动的问题,同时为简化参数整定工作,提出采用LADRC方法进行刀具系统的转速控制。然后根据刀具系统的二阶状态方程,设计了刀具系统的LESO和线性自抗扰控制律,并进行了线性自抗扰刀具闭环系统的稳定性证明。最后通过切割作业实验,证明了本文所设计的LADRC方法的有效性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
建筑施工(2022年3期)2022-07-18
交通企业管理(2020年6期)2020-11-11
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
数学物理学报(2019年4期)2019-10-10
中国交通信息化(2017年5期)2017-06-06
贵州师范学院学报(2016年3期)2016-12-01
电源技术(2015年11期)2015-08-22
城市道桥与防洪(2014年5期)2014-02-27
