球磨机自动加球控制系统设计
2023-04-04 08:12姚宇
科技创新与应用 2023年9期
姚 宇
(深圳市中金岭南有色金属股份有限公司,广东 韶关 512325)
目前某矿山大型球磨机仍然采用的是人工分批添加一定量的磨球的方式,这种加球方式使操作人员的劳动强度加大,且加球效率低。因此,采用自动加球控制系统来代替人工加球是必然的选择。通过研究球磨机的生产工况,球磨机在正常生产运行状态下,磨矿量不发生大的变动,钢球的损耗率基本稳定。为了保证球磨机磨球装载量和不同球径的球的最佳比例分布,笔者决定改变以往的定期一次性添加适量磨球的办法,通过自动加球系统实现连续加球,保证球磨机运行在最佳状态,从而提高磨矿效率。
目前市场上常用的自动加球设备主要采用滚筒式、转盘式、吸盘式和U 型添加等方式,这些加球方式由于受磨球重力挤压会导致球爪或者取球机构变形,从而导致卡球、堵球的现象发生。而且由于生产技术的不断改进,磨球的大小或者材料可能会作出改变,常用自动加球设备无法满足自适应,针对不同的磨球会出现无法精准抓取的现象。针对上述种种问题,本系统提出了采用先进而且广泛应用于工业现场的工业机械臂,结合3D 视觉系统定位磨球位置,通过专门设计的针对不同尺寸磨球的海绵真空吸盘来实现精准抓取,所抓取的磨球运送到平台边的下料漏斗中,下料漏斗中安装有红外传感器来检测过球情况,同时达到精确计数的目的。自动加球机控制原理图如图1 所示。

图1 自动加球机控制原理图
1 硬件结构

图2 硬件结构图
1.1 主控部分
本文主控制器采用工业计算机,主控制器主要负责对三维激光扫描仪测量的数据进行处理,将磨球的位置坐标信息转换为以机械臂为基点的坐标数据,同时计算出最适合抓取的磨球分布模型。等待机械臂准备就绪,主控制器发送指令到运动控制器,运动控制器控制机械臂根据磨球具体坐标位置进行抓球,并将磨球传送至下料漏斗,安装于下料漏斗上的红外传感器检测有磨球通过代表一次抓球过程完成,主控制器根据传感器检测磨球通过次数记录加球数,如果在一定时间内红外传感器没有检测到磨球通过视为抓球失败,需要重新执行一次抓球过程。
1.2 执行机构
工业机械臂在工业生产中应用广泛,以其结构简单、紧凑、操作容易、安全可靠和经济适用等特点在国内得到普遍推广。球磨机添加磨球从抓取到传输至卸料斗的过程是连续且重复不断的,因此使用工业机械臂代替人工手动操作是不二之选。本系统中采用四轴机械臂作为执行机构,目的是从球仓中抓取磨球并将磨球输送到卸料漏斗中,磨球在球仓中呈不规则分布,三维激光扫描仪通过扫描球仓表面来获取磨球的分布状态,并获得表面磨球的三维坐标,通过计算得出最佳抓取的磨球分布个数,机械臂需要从上层依次抓取磨球,抓取完后三维扫描仪进行下一次扫描。本系统中四轴机械臂主要由电控系统、人机交互和伺服驱动等构成。
1.2.1 电控系统
电控系统除了给机械臂各部件提供电源,作为整个机械臂的控制机构,控制着整个机械臂的各项动作执行。电控系统中以运动控制器为控制核心,主要控制机械臂在工作空间的运动位置、姿态和轨迹、操作顺序及动作时间等。同时运动控制器还集成有TCP/IP/Modbus-TCP、CAN 和ProfibusDP 等通信接口,方便连接PC、伺服驱动单元、示教器和其他外部控制设备。运动控制器还支持IO 端口扩展,可以通过数字量输入IO 模块读取外部信号状态,数字量输出IO 模块发送控制指令,模拟量输入模块读取各传感器检测模拟数值以及通过模拟量输出模块传输模拟数值给显示终端。
工业机械臂在运行过程中由于不规范的操作或者设备故障可能会导致机械臂不正常动作,存在极大的安全风险,因此电控系统中必须要设置安全回路。安全回路包括电柜急停、外部急停、示教器急停、安全继电器、安全继电器模块和接触器等。安全回路采用双回路冗余设计,且双回路为高低电平防错设计,RT6 安全继电器分别采用一对24 V 和0 V 回路,安全回路中示教器急停、机柜急停、外部急停和安全继电器串联连接实现多点联控。输出采用软硬兼顾的双回路设计,硬件方面安全继电器输出控制接触器的线圈,当接收到急停信号,直接切断动力源,发出急停指令让机械臂报错停止,同时关闭电机抱闸。
1.2.2 人机交互
操作人员可以通过示教器与机械臂完成良好的交互,操作人员通过示教器可以完成机械臂运动指令编程、机械臂零位标定、手动单步执行和远程控制等功能。示教器相当于一块可移动的多功能手操器,具有触摸功能,面板上集成有功能齐全的薄膜面板和双回路急停开关,均采用薄膜覆盖,具有良好的防水性能。为了防止误操作,面板抓手位置还设置三段式手压开关,手压开关只有在正确的位置才能允许伺服驱动动作。
示教器界面友好,操作人员能够很快熟练掌握。操作界面首页第一栏为状态栏,可以通过图标的颜色和明暗度来判断程序运行状态、伺服状态、急停状态、运行模式、坐标系选择及通信状态等。状态栏下面就是任务栏,操作人员可以选择查找文件、运行程序、监控画面和IO 接口设置等任务。任务栏下面是工作区,工作区内有各种功能图标,通过点击图标就可以跳转到相应功能界面,工作区内可以完成工具坐标系与用户坐标系的切换,在设置里完成机器人各个参数的设置,包括轴参数、总线协议参数和零点标定参数。
1.2.3 伺服驱动
MRI组MRI检查损伤总诊断率为89.58%,关节镜诊断率为91.67%,两种诊断方式诊断结果无显著差异(P>0.05),见表1。
机械臂4 个轴是由伺服驱动单元控制伺服电机运动,机械臂一轴、二轴采用1.5 kW 伺服驱动器,三轴为750 W 伺服驱动器,四轴为400 W 伺服驱动器。伺服驱动具有调速范围宽、定位精度高、传动刚性好、响应速度快、过载能力强和可靠性高等特点。伺服电机从最低速到最高速加速都能平稳运转,转矩波动小,尤其在低速时仍保持平稳而无爬行现象。伺服电机具有较大的过载能力,能够满足低速大转矩的要求,正常情况下过载4~6 倍而不损坏。伺服电机能够承受频繁启动、制动和反转,具有较小的转动惯量和较大的堵转转矩,较小的时间常数和启动电压能够满足快速响应的要求。
1.3 视觉系统
本系统中采用三维激光扫描仪作为视觉检测机构,三维激光扫描仪主要由激光发射器、接收器、时间计数器和马达控制可旋转的滤光镜、控制电路板、微电脑、CCD 机及软件等组成。三维激光扫描仪突破了传统单点测量方法的局限,具有高效率、高精度的独特优势。三维激光扫描仪可快速测得物体的轮廓集合数据,能够提供扫描物体表面的三维点云数据,并加以建构、编辑和修改,生成通用输出格式的曲面数字化模型。
1.4 抓取装置
要从球仓中将磨球抓取并运送到球磨机卸料斗中,必须要选用一套能够稳稳抓住磨球的装置。电磁吸盘在磨球抓取领域中应用广泛,但电磁吸盘只针对钢球有效,目前球磨机磨球除了钢球外还有非金属球的氧化铝球、氧化锆球和陶瓷球,使用电磁吸盘具有一定的局限性。本系统中选用海绵真空吸盘来作为抓球装置,海绵真空吸盘属于真空吸盘的一种,相较于普通真空吸盘,其功能更强大,主要是由海绵(密封件)、真空发生器、储能器、独立阀体和气管接口组成。真空吸盘上的海绵并不是普通的海绵,而是一种EPDM 橡胶发泡海绵,这种海绵具有耐高温、柔软及回弹性能好等特点,作为海绵真空吸盘的密封材料。吸盘底部是由无数个小孔组成的,每一个小孔都充当吸盘的作用,在吸附非平面的物体时具有一定的优势。当海绵真空吸盘接触物体表面时这些小孔会自动感应到是否接触到物体,而那些没有接触到物体的小孔会自动关闭阀门,这就让整套海绵真空吸盘具有很好的密封性。
工艺现场磨球尺寸有3 种规格,分别是Φ120 mm、Φ100 mm、Φ60 mm。为了让海绵真空吸盘能够精准抓取磨球,吸盘设计尺寸要合理,接触面太大容易吸附旁边的钢球,太小则吸力不够无法抓取磨球,因此吸盘尺寸要略小于磨球直径,吸盘表面要设计成凹面以能够与磨球表面更贴合。针对3 种磨球尺寸设计3 种尺寸的海绵真空吸盘,3 个吸盘安装于机械臂末端旋转轴上,可以通过指令切换吸盘。
2 程序设计
2.1 主程序
主程序负责完成与视觉系统的数据通信和协调调用其他子程序,主程序循环扫描执行。程序执行前先初始化串口、定时器和计数器,开始执行扫描程序并读取视觉系统传输的数据,然后将视觉系统坐标数据转换为机械臂坐标数据,并分析计算出最适合抓取的磨球坐标数据。接下来执行抓球子程序,机械臂运动至要抓取的磨球上方,海绵真空吸盘动作抓住磨球,机械臂继续运行至下料漏斗上方,海绵真空吸盘释放磨球,漏斗壁上的红外传感器检测到磨球落下就代表完成一次抓球过程。当机械臂抓完本次扫描到的磨球后才继续下一次的扫描动作(如图3 所示)。
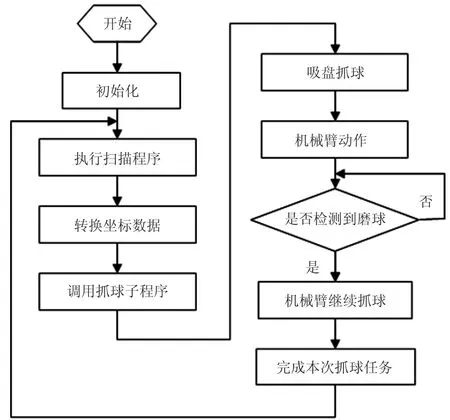
图3 主程序流程图
2.2 坐标转换
机械臂要精确抓取磨球就必须要有磨球的坐标参数,机械臂末端的三维激光扫描仪获取的磨球的坐标信息是基于扫描仪坐标系的,并不能直接使用。那么,要得到磨球在机械臂坐标系下的正确坐标位置信息,系统必须对扫描仪坐标下的位置与机器人坐标下的位置进行标定,这个过程就是手眼标定。本系统中使用Tsai-Lenz 算法进行手眼标定,标定过程需要采用标定板,我们需要得到机械臂坐标系到基础坐标系的转换关系baseHtool、扫描仪坐标系到机械臂坐标系的转换关系toolHcam 和扫描仪坐标系到标定板坐标系的转换关系calHcam,最终求得标定板坐标系到基础坐标系转换关系。
2.3 抓球程序
主控制器接收到视觉系统传输的磨球数据并进行数据运算处理、格式转换和筛选后,得到一定数量的磨球坐标,主控制器给这些磨球坐标随机编号,然后主控制器依编号发送抓球命令和给机械臂控制系统,机械臂控制系统控制伺服驱动器执行抓球命令。机械臂将末端移动到等待抓取的磨球正上方坐标处,海绵真空吸盘动作抓住磨球,机械臂接着将末端移动到下料漏斗正上方坐标处,海绵真空吸盘释放磨球,磨球落入下料漏斗,红外传感器检测到磨球通过,发送信号给主控制器代表完成一次抓球动作,机械臂继续抓取下一编号磨球。机械臂抓球过程中,如果磨球因为外力或者其他原因脱落,导致传感器没有检测到磨球,则视为本次抓球过程失败,机械臂返回重新抓取下一个磨球。
3 运行调试
球磨机的磨球添加是从入料端加入的,加球机的安装应该尽量靠近入料口,要考虑土建结构的承重,并保证加球机参数的精确,机械臂安装底座需要与球仓底座在同一水平面。设备安装完成就可以上电运行调试了,调试之前需要对机械臂的参数进行设置。示教器进入设置菜单配置文件中设置球仓长、宽、高的参数和虚拟手爪数量,为了机械臂能够更快速、准确地抓取目标,还需要设置抓取路径和释放路径。示教器置于手动状态下抓取路径以机械臂原点为准备点,示教器手动移动机械臂至球仓中央略高于球仓的位置作为抓取路径的进入点和后撤点,示教器移动至下料漏斗正上方10 cm 作为释放路径的进入点和后撤点,在参数配置中记录这些点的坐标位置。参数设置完毕就可以将示教器置于自动状态,待球仓装满磨球后就可以开始自动加球,加球过程中逐步优化控制程序和控制参数,直到系统稳定运行。
4 结束语
本系统可以针对不同尺寸、不同材质的磨球进行添加,而且可以给多台球磨机同时加球,实现了磨球添加的精确计量,更有利于改善球磨机磨矿效率。本系统通过改变以往的人工手动加球方式,实现机械化自动加球,提高了磨球添加效率,减轻了操作人员的劳动强度,具有一定的经济效益和社会效益。
猜你喜欢
钛工业进展(2022年2期)2022-05-13
防爆电机(2022年2期)2022-04-26
少儿科学周刊·儿童版(2021年19期)2021-12-10
少儿科学周刊·儿童版(2021年19期)2021-12-10
石油化工建设(2019年6期)2020-01-16
模具制造(2019年3期)2019-06-06
经济技术协作信息(2018年8期)2019-01-14
小学生必读(中年级版)(2018年5期)2018-08-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
新疆钢铁(2015年1期)2015-11-07