
基于星间链路的星座相对构型保持方法
2023-04-19 06:10杨盛庆吴敬玉朱文山钟超
航空学报 2023年6期
杨盛庆,吴敬玉,朱文山,钟超
1.上海航天控制技术研究所,上海 201109
2.上海市空间智能控制技术重点实验室,上海 201109
随着航天科学技术的发展,航天任务日趋复杂。传统的大卫星受自身轨道运动和地球自转运动造成的时空约束,单个卫星难以实现全球性的实时观测或通讯功能,小卫星星座应运而生。随着小卫星发射入轨和全球组网成本的降低,国外SpaceX、OneWeb、亚马逊等商业航天公司都相继提出了低轨星座计划,通过低轨巨型星座提供全球覆盖的宽带通信服务[1]。
星座的种类繁多,根据功能不同,有通讯、导航、测绘等。根据所处轨道划分,有静止轨道[2]、倾斜中轨道、大椭圆轨道[3]、近地极轨道[4]等。星座发展的初期,研究内容主要针对星座的轨道设计,设计目标包括星座的构型最优[5-6]、星座的覆盖特性最优等[7-8]。在星座构型确定的基础上进行星座构型保持,首先需要解明航天器在自然受摄状态下的相对运动特征。文献[9]研究了地球非球形引力摄动下,各航天器初值偏差引起的星座构型演化问题。文献[10]基于线性化的相对运动方程,实现了J2项摄动作用下近距离星座的相对运动控制。文献[11]针对地球非球形引力摄动,提出了主动偏置半长轴和倾角来补偿升交点赤经和沿迹角漂移量的方法。大气阻力是影响近地航天器运动的一项重要摄动项,大气阻力的积累效果会致使轨道衰减,改变航天器的轨道角速度。星座内航天器由于面质比的差异,所受大气阻力的摄动影响存在差异,会导致轨道面内的平均半长轴产生偏差,进而使航天器之间的相位差偏离标称值。文献[12-13]分析单个航天器轨道在大气阻力影响下的变化特性,提出通过改变航天器迎风面,进行同一圆轨道上2 个航天器之间的相位调整。此外,虽然日月引力摄动属于保守力,但对中高轨道和太阳同步轨道的影响较为明显。日月引力摄动的长期积累,会产生轨道倾角的偏差。文献[14]针对中高轨道上的Walker 星座所受的各项摄动,研究了星座构型的摄动补偿法,提出了星座构型数值微分修正法。文献[15]针对低轨大规模Walker 星座构型设计了一套控制仿真系统。综上所述,航天器在轨受摄运动复杂,轨道面内和轨道面外运动存在耦合。
星座构型保持是一个复杂的多体运动控制问题,需要设计合理高效的轨道控制策略。一般来讲,星座轨道面内的相对构型保持主要处理面质比差异导致的平均半长轴差异和相位差漂移。星座轨道面外相对构型保持主要处理地球非球型引力、大气阻力、日月引力摄动联合引起的轨道面长期变化。文献[16]提出星座的构型保持可以采用绝对位置保持或相对构型保持控制策略。绝对位置保持要求单星的星下点轨迹按严格固定的网格运行,单星位置保持在随星座构型一起运动的控制盒内,通过绝对位置的保持来实现星座构型保持。文献[17]提出使用公开的两行轨道根数对国外星座控制策略进行分析,重点分析了铱星、一网、星链星座的控制规律。文献[18-19]采用网格分割的方法,提出了基于绝对位置保持的Walker 星座和玫瑰星座构型保持方法。绝对位置保持具有控制方法简单的特征,但是绝对位置保持的目标状态难以在星上自主确定,需要地面辅助确定绝对位置保持的目标轨道。而且,绝对位置保持的星座构型刚性强,控制需要完全补偿大气阻力导致的星座轨道衰减,相应的控制代价更大。与之相反,相对构型保持理论上仅需补偿面质比差异导致的衰减偏差,能够使星座中所有航天器趋同于一致的速率衰减,从而减少控制代价。
星座相对构型保持的核心问题,是要构造一类基于局部测量信息的控制方法。基于局部链路的巨型星座构型保持属于分布式控制方法,相较于星座的整体优化方法(集中式控制,优化变量多、计算代价大),分布式控制更有利于在轨自主保持的实现。一致性控制方法能够根据需求,兼容集中式或分布式控制,较好地实现多个体系统的协同控制,已应用到多个航天器的编队协同[20]和姿态协同控制[21]。文献[22]基于星座内航天器相对运动,介绍了十字型、星型链路的星座构型特征。利用图论刻画多个体系统拓扑结构并应用一致性控制方法,是实现星座相对构型保持控制的一种有效手段。文献[23-24]分别结合航天器和导弹力学系统,利用拓扑结构设计了多体系统的分布式协同控制方法。不同于局部的平面拓扑,星座构成一个闭环的网络,闭环星座的拓扑结构及其一致性控制有效性仍有待进一步研究。星座的轨道多要素联合保持控制,属于多参数耦合的非线性动力学系统,还要考虑动力学系统的高阶形式[25]。为了提升高阶一致性的控制效率,文献[26]介绍了一种基于PID 控制参数设计的一致性控制方法。本文针对自然摄动下轨道运动特性,提出了星座相对构型保持的一致性控制方法。考虑到摄动导致的相对运动变化率较小,为了便于工程应用,可以考虑采用定周期控制,将相对构型保持控制转变为一个离散一致性控制问题[27-28]。
本文针对低轨巨型星座,分析了星座多个体系统不同的星间链路连接方式及其闭环网络特征,提出了不同几何拓扑结构及其相应的图论构造方法。针对航天器的受摄运动特征,分析了巨型星座轨道面内平均半长轴和相位差的漂移情况。针对星座内航天器平均半长轴和相位差变化的特征,构造了相应的离散二阶一致性控制算法。
1 星座的几何拓扑结构与链路图
1.1 星间链路的几何拓扑结构
星座的相对构型保持可视为多星系统的一致性控制,考虑到建立星间链路的空间约束和效费比,假设只在轨道面内的相邻卫星和相邻轨道面之间的“邻位”卫星之间建立星间链路,每颗卫星获取的群体信息是局部的。对于确定构型的星座,相邻卫星和“邻位”卫星之间的相位控制目标是明确的。
星间链路的有效距离,以过地心大圆的相位差形式表述
式中:Re表示地球半径;a表示卫星轨道的半长轴;ΔM表示星间的平近点角之差。以轨道高度540 km 的轨道为例,能够建立星间链路的最大相位差为45°。使用下标表示卫星编号,相邻卫星间的相对升交点赤经ΔΩij和相对纬度幅角Δuij取值ΔΩij≈Δuij≈40o,形成如图1 所示的十字型链路星座。星座共计81 个航天器,包含9 个轨道面,每个轨道面内9 个航天器,相邻航天器的相位差40°,相邻轨道面之间“邻位”航天器的相位差为40°。图中对航天器进行了编号,整个星座形成闭环的网络。通过标识图形形状、标色和编号联合,来区分图中形成闭合图的边界和顶点的情况。蓝色正方形表示轨道面内形成闭环的边界航天器、绿色菱形表示不同轨道面形成闭环的边界航天器、六边形为2 个边界的交点航天器。

图1 星座的十字型链路拓扑结构Fig.1 Constellation topology with cruciform structure links
取ΔΩij≈20o,航 天 器i和 航 天 器j位 于 相 邻轨道面时Δuij≈20o,航天器i和航天器j位于同一轨道面时Δuij≈40o。星座共计162 个航天器,包含18 个轨道面,每个轨道面内9 个航天器,相邻航天器的相位差40°,相邻轨道面之间“邻位”航天器的相位差为20°。根据星间链路的不同建立方式,可以定义叉字型链路(如图2 所示)和星型链路的星座(如图3 所示),航天器标示的图形形状、标色和编号原则同上文。

图2 星座的叉字型链路拓扑结构Fig.2 Constellation topology of cross structure links

图3 星座的星字型链路拓扑结构Fig.3 Constellation topology with star structure links
1.2 基于几何拓扑结构的局部链路图
使用局部链路图描述星座的几何拓扑结构,且默认建立星间链路的航天器的信息链路双向传递。如图4 所示,建立星座的局部拓扑结构。其中,星型链路根据局部的相对位置关系可以定义左侧轨道面上方/下方、相同轨道面上方/下方、右侧轨道面上方/下方。

图4 星座的局部拓扑结构Fig.4 Local topology of constellation
假设星座共计N个轨道面,每个轨道面内M个航天器。为了建立拓扑结构对应的Laplacian矩阵,需要对星座内航天器进行编号。定义轨道面序号和轨道面内序号组合(n,m)到一维计数的映射f:(n,m)→k,满足k=(n-1)M+m。
同理,定义g:k→(n,m),满足
具有星间链路的航天器之间
观察到星座的拓扑结构中,形成闭环结构的共用点特征,需要对边界进行特殊处理。
对于轨道面序号
利用上述局部拓扑构造方法和航天器编号规则分析图3 所示的星型链路星座,图5 为该星座内部的链路状态,是Laplacian 矩阵的图形化表述,展示了巨型星座中局部链路的稀疏性。图中链路状态为1 表示具备星间链路,0 表示不具备星间链路。表1 为该星座中局部链路的示例。

图5 星字型星座的链路状态Fig.5 Inter-satellite connections in star structure constellation

表1 星字型星座内链路示例Table 1 Examples of inter-satellite connections in star structure constellation
根据上述编号规则,生成Laplacian 矩阵,并计算相应的矩阵特征值。如图6 所示,不同拓扑结构的Laplacian 矩阵,随着星间链路数量的增加,特征值负数根在绝对值大的区域分布更加密集,多个体系统的一致收敛性更好。


图6 不同拓扑结构的Laplacian 矩阵特征值Fig.6 Eigenvalues of Laplacian matrix for different topology structures
2 星座的相对构型保持
2.1 轨道的动力学方程
低轨卫星在轨运动主要受到地球引力场、日月引力、大气阻力等摄动影响。由J2项摄动、大气阻力引起的平均轨道根数的长期变化率为
式中:e为偏心率;i为轨道倾角;Ω为升交点赤经;ω为近地点幅角;M为平近点角;n为轨道角速度;J2为引力场J2项参数;CD为大气阻力参数;A为航天器迎风面积;m为航天器质量;ρ为大气密度。轨道面内的星座构型保持主要针对轨道根数的平均半长轴和平近点角,针对星座内航天器面内构型产生的长期漂移的根源,即大气阻力和面质比差异导致的轨道衰减速率、轨道角速度不一致,控制平均轨道半长轴可以实现星座轨道面内的构型保持。
2.2 星座相对构型保持的一致性控制
多个体系统的二阶一致性控制,其一般形式可以描述为[25]
式中:ξi表示个体i运动的状态量;ζi表示个体i运动的一阶状态量;gij为多个体系统之间的关联参数;kij为一致性控制算法中不同链路对应的控制调节参数。
轨道面内的星座的构型保持控制以平均半长轴和平近点角作为控制的状态量,要求控制目标实现平均半长轴的一致、实现平近点角的目标状态一致。
式中:ΔM*ij根据星座拓扑情况定义。以星型链路星座为例,ΔM*ij取值为±20o和±40o。考虑到拓扑结构的几何对称性,假设控制参数取常值kij=k时,
轨道面内的星座构型保持,可以转化为二阶一致性控制
式中,参数γ的合理确定是实现二阶一致性控制的关键。式(9)可转化为
利用泰勒展开
工程实践中,控制往往采用定周期控制形式。构造二阶一致性控制的离散形式[27]
3 数值实验
3.1 星座构型的受摄运动
数学实验采用轨道高度为540 km 的太阳同步轨道,星座采用162 个航天器组成的星字型链路构型。采用上文所述编号方式,轨道面1 的降交点地方时取0 时,后续轨道面均匀分布。每个轨道面内第1 个航天器的纬度幅角根据几何拓扑结构定义,取值为
使用MATLAB 驱动轨道积分器进行巨型星座的轨道积分,如图7 所示。积分器采用式(5)所述的轨道动力学和四阶龙格库塔积分算法,轨道积分器的接口函数中轨道位置相关输入项为平近点角,需要由纬度幅角转换为平近点角。
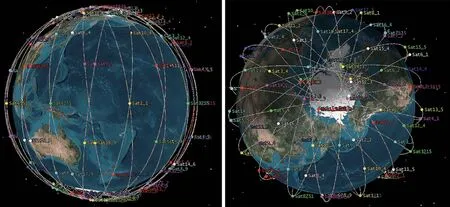
图7 星座的三维视图Fig.7 Three dimensional vision of constellation
模拟星座实际在轨存在的面质比差异,以0.005 m2/kg 为基准面质比。如表2 所示,针对轨道面序号和轨道面内序号组合(n,m)生成随机数,使得每个航天的面质比在基准面质比的基础之上,进行±20%的浮动变化。大气密度随着太阳活动的低年、中年或高年特征而变化。

表2 基准面质比基础之上的星间差异Table 2 Difference between satellites based on typical mass-area ratio
根据文献[29]所述大气密度表,采用太阳活动中年的大气密度为基准,对轨道高度进行拟合插值得到540 km 轨道高度的平均大气密度,约为ρ=7.2×10-13kg/m3。取CD=2.2,根据式(5)中半长轴的变化率公式,该轨道上航天器的平均半长轴日衰减约36 m。轨道受摄运动90 天,星间半长轴偏差累积量最大值达到1 000 m,平近点角偏差累积量最大值达到60°,如图8和图9所示。


图8 大气阻力下自由漂移90 天的平近点角偏差Fig.8 Relative mean anomaly axis excursion in 90 days with air drag

图9 大气阻力下自由漂移90 天的半长轴偏差Fig.9 Relative semi-major axis excursion in 90 days with air drag
本文中二阶一致性控制仿真采用冲量式控制。根据高斯摄动方程,对于半长轴的控制,连续推力的弧段积累就能基本实现冲量式控制的等效效果。连续推力和冲量式控制的区别在于对偏心率矢量的影响。工程应用中,可以考虑定周期时间点附近的特殊点对称弧段实施连续推力控制,避免或减小连续推力对偏心率矢量产生的弧段效应。
3.2 星座构型的一致性控制效果
仿真验证星座构型的一致性控制效果,定周期控制的间隔设置为1 天,仿真90 天。设置控制参数设置(k,γk)=(0.2,6 000)。基于星座相对构型保持的一致性控制,星间半长轴偏差控制在( -5 m,5 m)范围内,平近点角偏差控制在标称值附近( -0.1o,0.1o)范围内,如图10 和图11 所示。相对构型保持控制主要消除面质比差异导致的衰减不一致,并非完全补偿大气阻力造成的轨道衰减。如图12 所示,星座中162 颗卫星以1 天1 次的控制频率进行半长轴调整,离散一致性控制过程中的控制代价以半长轴控制量形式表述。每颗星的控制量与其面质比相关,控制趋于稳定后,半长轴形式的控制量均<10 m。相较于绝对位置保持补偿平均半长轴36 m 日衰减量,相对构型保持的控制代价更小。
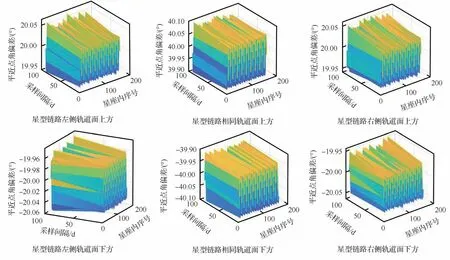
图10 相对构型保持控制下90 天的平近点角偏差Fig.10 Relative mean anomaly axis in 90 days with relative-configuration maintenance

图11 相对构型保持控制下90 天的半长轴偏差Fig.11 Relative semi-major axis in 90 days with relative-configuration maintenance

图12 星座相对构型保持的控制量统计(半长轴控制量形式)Fig.12 Statistics on control cost of relative configuration maintenance in forms of semi-major axis
4 结 论
巨型星座中航天器受空间摄动作用,星座构型长期演化会造成偏差累积漂移现象,需要进行星座构型保持控制。传统的绝对位置保持方法,星上难以汇集星座整体信息以生成目标轨道,必须由地面介入规划。随着星座规模的日趋扩大,未来星座构型保持的发展方向将围绕基于局部信息的分布式相对构型保持方法。相较于传统的绝对位置保持方法补偿轨道衰减,相对构型保持只需补偿面质比差异造成的衰减差异,控制代价更小。
星座在空间中形成一个闭环的拓扑结构,根据星间链路的连接情况,本文提出了不同几何拓扑结构及其相应的图论构造方法。针对星座轨道面内航天器平均半长轴和相位差变化的特征,构造了相应的离散二阶一致性控制算法。后续工程应用,需要高精度轨道根数瞬平转换算法来保障半长轴的确定精度或者使用相对相位的漂移量估计星间的半长轴偏差。此外,星座构型保持面临轨道面内运动的相对半长轴和相对相位保持、轨道面外运动的相对升交点赤经保持等问题。由于日月引力对轨道倾角的长期项和周期项影响,结合J2项导致轨道面内运动、轨道面外运动的耦合特性,其力学问题的解析形式仍有待进一步研究。其本质是控制对象的动力学复杂度提升,本文阐述的星座拓扑结构和二阶一致性控制方法仍可沿用。
猜你喜欢
作文大王·笑话大王(2023年8期)2023-07-17
装备维修技术(2022年3期)2021-12-06
中学数学研究(广东)(2021年19期)2021-11-19
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
空间科学学报(2020年3期)2020-07-24
中学数学研究(江西)(2019年12期)2020-01-10
测绘科学与工程(2017年4期)2017-05-25
北京航空航天大学学报(2017年10期)2017-04-20
水电站机电技术(2014年4期)2014-10-13
航天返回与遥感(2014年4期)2014-07-31
