电动汽车用永磁同步电机自适应PI控制仿真分析
2023-05-09 09:46李嘉轩南力霞
汽车实用技术 2023年8期
李嘉轩,南力霞
(长安大学 汽车学院,陕西 西安 710064)
永磁同步电机是当今电动汽车领域广泛使用的一种电机,大多数国内主机厂商都选用永磁同步电机,而欧美公司多选用交流感应电机。对永磁同步电机控制算法的研究一直层出不穷,矢量控制是其中最经典和最成功的算法之一,矢量控制对于永磁同步电机及其他电机的研究都具有极高的参考价值。但由于永磁同步电机有较强的非线性特性,且电机的多个参数相互耦合,在复杂及一些极端工况下,电机参数会发生改变[1]。此外矢量控制本身控制参数也无法动态调整,所以矢量控制方法仍存在一些不足[2]。
文章针对矢量控制在自适应调节方面的劣势,即控制器参数固定,无法根据工况等实时改变控制器参数,构建了BP 神经网络模型对传统矢量控制转速环PI 控制器进行改进。针对一款混合动力汽车用永磁同步电机建立了传统矢量控制模型和自适应PI 矢量控制模型,通过仿真结果的对比,可知基于BP 神经网络的自适应PI 矢量控制在一定程度上弥补了传统矢量控制的不足,提高了控制效果,系统的鲁棒性也有所提升。
1 永磁同步电机数学模型
建立电机模型时为了利于控制算法的设计,在保证电机模型准确性的前提下我们需要进行合理的假设:1)电机参数不改变;2)磁场近似正弦分布;3)各绕组磁链不饱和;4)忽略涡流损耗[3-4]。
矢量控制利用坐标变换对同步旋转坐标系下的直轴和交轴电流进行控制,实现参数解耦。d-q坐标系下电机的数学模型为[4]
其定子电压方程:
定子磁链方程:
将式(2)带入式(1)得定子电压方程:
电磁转矩方程:
式中,ud、uq为定子电压;id、iq为定子电流;R为定子的电阻;Ψd、Ψq为定子磁链;ωe为电角速度;Ld、Lq为电感值;Ψf为永磁体磁链。
实际进行控制时需要使用不同坐标系下的电流、电压等参数。坐标变换所需的Clark 变换和Park 变换公式如式(5)和式(7)所示。
式中,f为电机电流、磁链等变量值,下角标代表不同坐标系。T3s/2s为Clark 坐标变换矩阵。T3s/2s为Park 坐标变换矩阵。
2 PMSM 矢量控制技术
永磁同步电机矢量控制将永磁同步电机拟化为他励直流电机进行控制[5]。其基本原理是控制定子中d轴电流为零,这时电磁转矩与q轴电流成正比,只需调节q轴电流值即可获得目标电磁转矩[3]。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)矢量控制系统通常包括转速环、电流环和脉冲宽度调制(Pulse Width Modulation,PWM)三部分。其中,转速环调节电机转速使其迅速跟踪目标值;电流环完成解耦控制,加快系统动态调节速度。在建立传统矢量控制模型时电流环和转速环都使用PI 调节器进行控制;选择SVPWM 算法来获得准圆形旋转磁场控制电机[6-7]。矢量控制系统结构如图1 所示。
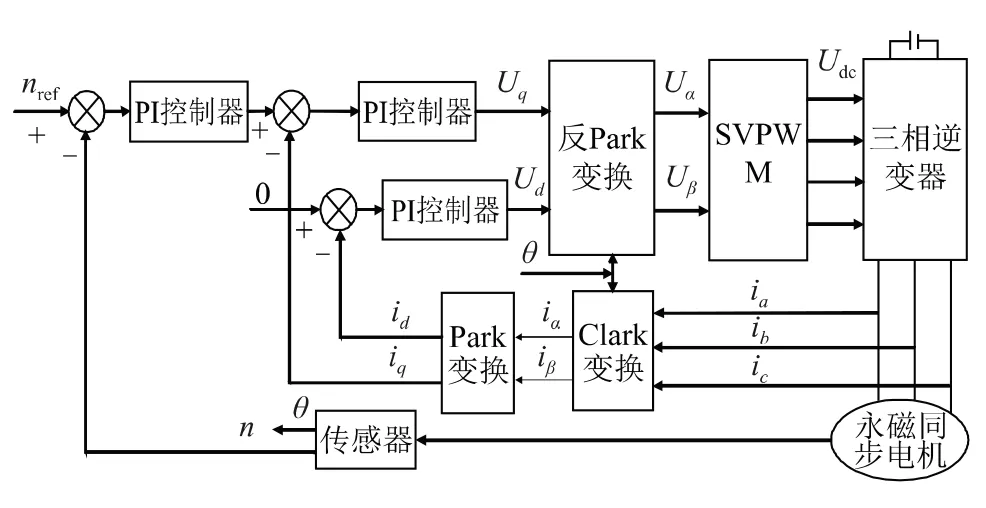
图1 PMSM 矢量控制结构
3 自适应PI 控制器
3.1 自适应PI 控制器的基本原理
文章利用BP 神经网络对传统矢量控制系统中的转速环PI 控制进行改进,通过自适应调整PI控制器的参数,提高矢量控制的动态品质。控制系统的结构如图2 所示,将不同时刻的参考电机转速nref、实际转速n以及转速误差e作为BP 神经网络模型输入量,KP和KI值作为模型输出,通过实时调节PI 控制器的参数,以适应不用工况的转速需求。
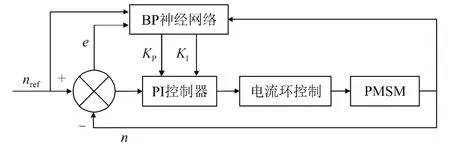
图2 自适应PI 矢量控制结构
3.2 BP 神经网络的基本原理
BP 神经网络有较好的函数逼近效果,可以很好地适应系统的非线性。其利用误差反向传播训练的算法构建模型,根据输出误差大小,通过梯度最速下降法不断调整阈值和权重,最终得到满意的拟合效果[8]。文章使用的BP 神经网络具体结构如图3 所示。

图3 BP 神经网络结构
BP 神经网络输入层的输出表示为
隐含层节点的输入可以表示为
式中,j表示输入层节点,j=1,2,3;i表示隐含层节点,i=1,2,3;ωij为输入层节点到隐含层节点的权重因子;m为隐含层节点个数。
一个神经元需要输入、权重、阈值和激活函数才能得到输出,选取激活函数g(x)为tanh 函数:
隐含层节点的输出可以表示为
式中,θi为隐含层神经元的阈值。
输出层节点的输入可以表示为
式中,n为输出层节点个数。
输出层节点的输出可以表示为
式中,θk为输出层神经元的阈值。
之后通过比较神经网络预测值与真实值间的误差,采用梯度下降法不断调整权重和阈值,完成反向传播过程[9]。
设置输出层的输出误差损失函数为
式中,Ok为参考期望输出,p为输出层节点个数。
隐含层到输出层的权重调整:
输出层神经元的阈值调整:
输入层到隐含层的权重调整:
隐含层神经元的阈值调整:
式中,η为学习速率,η>0。
设置目标误差和最大迭代次数,经过反复迭代,最终得到PI 控制器的输入为
为了方便数据处理,加快算法收敛速度,提高控制器的运行速率,对训练集进行归一化操作。归一化算法如下式:
根据上述原理,在Simulink 中搭建基于BP神经网络的自适应PI 控制器,结构如图4 所示。

图4 基于BP 神经网络的自适应PI 控制器
4 系统仿真及结果分析
4.1 建立仿真模型
实际的使用场景中,矢量控制需要使用高精度的传感器,但获得的转速和转子位置信息仍会存在微小误差,信息也有一定延迟[10]。这里我们对控制模型进行简化,直接使用由电机模型得出的计算值,忽略延时影响。搭建的PMSM 自适应PI 矢量控制系统模型如图5 所示。

图5 永磁同步电机自适应PI 矢量控制模型
4.2 仿真参数及工况设定
针对Honda Civic 06My Hybrid 混合动力电动汽车用内置式永磁同步电机相关参数进行建模,表1 为电机参数[11]。表2 为仿真参数设置,工况设置如表3 所示。仿真结果如图6 和图7 所示。

图6 转速n 变化曲线
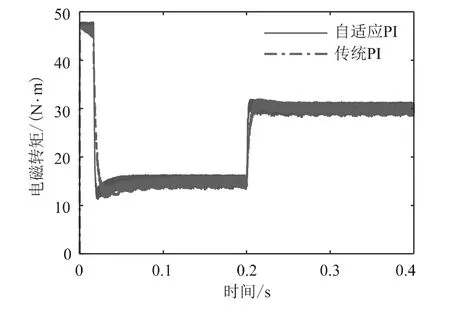
图7 电磁转矩Te 变化曲线

表1 电机参数

表2 仿真参数

表3 仿真工况
4.3 仿真结果分析
由图6 可知,传统矢量控制下的电机从零速上升到参考转速时,超调较大,且在0.2 s 转矩突变时转速存在一定的脉动;而自适应PI 控制下的电机从零速上升到参考转速时超调较小,动态响应也相对更迅速,在0.2 s 转矩突变时电机也能够快速稳定的跟踪参考转速。
图7 是参考转速nref恒为100 r/min 时,转矩在0.2 s 突变时对应电磁转矩Te的变化曲线。可以看出自适应PI 控制下电磁转矩的动态响应速度更快,对转矩的跟踪也相对更准确。
由上述分析可知自适应PI 矢量控制下PMSM动态响应特性得到了改进,且系统有较强的抗扰动能力。
5 结论
文章针对永磁同步电机,将BP 神经网络应用于传统矢量控制。通过将BP 神经网络算法与矢量控制下的PI 转速环控制结合,优化了传统矢量控制模型,建立了传统矢量控制仿真模型和基于BP神经网络的自适应PI 矢量控制仿真模型,并进行了仿真对比。仿真结果表明,与传统矢量控制相比,自适应PI 矢量控制在转矩突变时有更优秀的响应特性,抗扰动能力也更强,能够很好地满足车用电机使用需求。论文的研究给电动汽车用电机驱动控制系统的研究提供了新的思路,对电机控制系统的开发具有一定的参考价值。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
出版与印刷(2013年3期)2013-01-31