
修正RSSI值的二次栅格扫描与三角形质心定位算法
2023-06-03 12:12程良张永强赵正健李璐
电脑知识与技术 2023年10期
关键词:卡尔曼滤波
程良 张永强 赵正健 李璐
关键词:二次栅格扫描;RSSI;卡尔曼滤波
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2023)10-0096-03
0 引言
随着当下科学技术的不断发展,各行各业都在享受着互联网带来的便捷性。对于目标位置的重要性不言而喻。无线传感器网络是由许多带有功率接收功能的传感器节点组成,通过自组网方式能够形成一个稳定、健壮的网络[1]。利用该网络可实现目标对象的定位。相比于传统定位方式,无线传感器网络所形成的定位方式具有价格低廉,稳定性强等优点。但定位精度一直是无线定位算法发展的一个瓶颈。根据定位算法原理的不同可以将其分为两类,测距以及非测距的方式[2]。其中基于测距过于依赖硬件,导致成本上升。非测距是目前主要的研究方向。但误差较大,现在普遍的做法是利用各种算法进行优化,其中二次栅格扫描与质心迭代定位算法相比于其他定位算法精度较高[3]。不过,该算法中大量使用了RSSI值进行运算,致使实验存在累计误差。本文通过优化RSSI值来解决累计误差对该算法产生的影响。
1 Grid-Scan 算法描述
Grid-Scan算法也称作网格算法,是将各个锚节点的通信区域全部用小格子来填充。每个锚节点都可以接收通信区域内各节点的坐标和RSSI信息等[4]。未知节点是我们需要定位的节点,将该未知节点周围能够与之通信的锚节点的通信圆分别画出,再将重合区域用外接矩形表示出来并用ER标识,如图1[5]。把该外接矩形中的小格子全部标记成1,如图2。
2 优化算法
2.1优化RSSI 值
2.1.1 RSSI 的测距模型
信号在传播过程中,距离的变化会导致接收信号强度的变化,利用这个变化可以得到信号强度的衰减与距离的关系。目前普遍以shadowing模型为基础来得到相应的传播模型。用以下公式表示。
3 仿真实验
3.1 实验设计
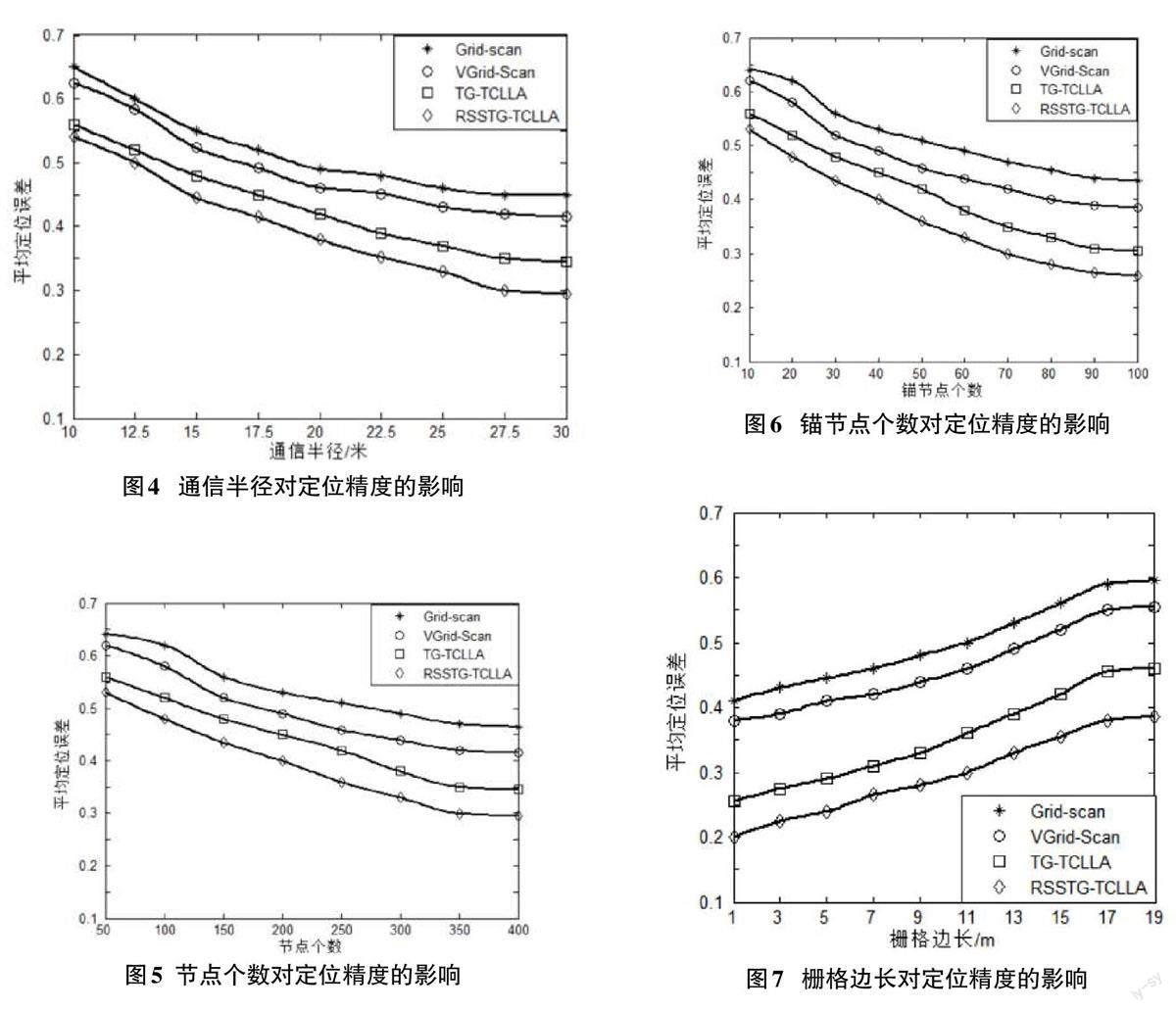
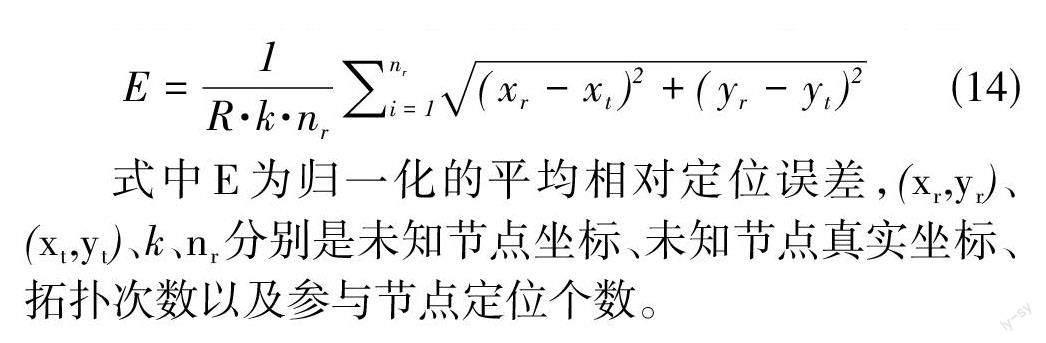
本文以Matlab为仿真工具,通过随机网络拓扑方式来模拟现实场景中的定位情况,以此来分析改进算法与其他算法之间的定位误差。将文中所提出的改进算法称为RSSTG-TCLLA算法,二次栅格扫描与三角质心迭代算法称为TGTCL-LA,二次栅格扫描算法记为Grid-scan 算法,文献[4]中的算法称为VGridscan算法。利用式(14)来计算归一化平均定位误差。
3.2 通信半径对定位误差的影响
设节点个数为200个,锚节点个数为30个,栅格边长为2米,仿真结果如图4所示。
由图4可以得到,四种算法随着通信半径的增大,定位误差均在减小。其中RSSTG-TCLLA算法的平均定位误差相对于TG-TCLLA算法,VGrid-scan算法,Grid-scan 算法分别减少了8.65%,11.59% 以及13.6%。
3.3 节点个数对定位误差的影响
设节点个数为N、锚节点个数为0.3N、通信半径为20米、栅格边长为2米。
由图5可得,当其他条件不变时,节点个数越多,整体定位误差就会越小,相比于Grid-scan 算法、VGrid-Scan 算法、TG-TCLLA 算法,文中提出的RSSTG-TCLLA 算法在平均定位誤差上分别减小了14.72%、12.35%以及10.28%。
3.4 锚节点个数对定位误差的影响
设节点总数为200个,通信半径为20米,栅格长2 米,锚节点作为整个定位区域的参考点,它的数量直接决定着整体的定位性能。
由图6得,文中所提RSSTG-TCLLA算法与Gridscan算法、VGrid-Scan算法、TG-TCLLA算法相比,平均定位误差分别减小了11.2%,9.6%以及5.8%。
3.5 栅格边长对定位误差的影响
设节点个数为200,通信半径为20米,锚节点为30个,随机拓扑节点网络。
如图7所示,随着栅格边长的减小,算法的定位误差也在降低。文中提到的RSSITG-TCLLA算法相比较于Grid-scan算法、VGrid-Scan算法以及TG-TCLLA 算法在平均定位误差上减小了9.56%,7.68% 以及3.25%。
4 结束语
由于二次栅格扫描与三角质心迭代定位算法,都是以节点的RSSI值为基础进行运算,所以保证RSSI 值正确与稳定是决定整个实验准确性的必要条件。常规的滤波方式对RSSI值的优化能力有限,同时不能解决RSSI中的极端数据问题。普通卡尔曼滤波算法也存在自身发散性问题,进而影响RSSI值的准确性。本文采用改进型卡尔曼滤波方式不仅能解决极端数据问题,同时引入渐消因子消除了卡尔曼自身带来的累积误差。从而提高了栅格扫描的精度范围,使整个网络的定位效果更精确。
猜你喜欢
电子制作(2019年23期)2019-02-23
测控技术(2018年12期)2018-11-25
电测与仪表(2017年20期)2017-12-19
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年4期)2016-11-07
电源技术(2016年9期)2016-02-27
江苏科技大学学报(自然科学版)(2015年4期)2015-12-17
电源技术(2015年1期)2015-08-22
电测与仪表(2015年24期)2015-04-09
