
基于北斗导航信息的洞穴三维地图机械绘图软件建模研究
2023-06-08 05:14李峰金永喆范文捷张巍
机电信息 2023年11期
李峰 金永喆 范文捷 张巍
摘要:传统地图为二维地图,三维地图建立比较困难,特别是自然界实物三维地图,尺寸变换规则度不高。为克服自然界实物三维地图信息建立比较困难的问题,以自然界洞穴为例,提出了通过国产北斗导航系统进行地理位置信息采集,同时利用激光测距仪进行断面形状尺寸信息采集,利用机械类三维绘图软件SolidWorks建立洞穴三维地图模型的方法。首先建立了河南省郑州市某地洞穴的三维地图模型,然后以地图模型及场景对比分析验证了方法的合理性、正确性,为后期其他自然界实物三维地图的建立提供了参考。
关键词:三维地图;自然界;洞穴;北斗导航;场景
中图分类号:P237 文献标志码:A 文章编号:1671-0797(2023)11-0026-06
DOI:10.19514/j.cnki.cn32-1628/tm.2023.11.007
基金项目:河南省科技攻关项目“基于北斗导航的人形机器人群航道智能规划位姿自动生成技术研究”(222102210307);郑州经贸学院 虚拟实验课程建设项目;郑州经贸学院 创客空间建设资助项目
0 引言
地图在人类社会生产生活、工作学习中发挥着重要作用。随着CAD技术的飞速发展以及测试技术的不断进步,电子地图技术也得到了长足的发展。电子地图技术与地理信息系统(GIS)技术结合,能够为人类生产生活、工作学习带来更大的便利,因此现在越来越受到各个国家的重视,成为研究的重点[1]。北京时间2020年6月23日,我国北斗三号最后一颗全球组网卫星在西昌卫星发射中心发射成功,我国北斗三号全球卫星导航系统星座部署全面完成[2]。北斗导航信息在电子地图中的应用已经有了长足的发展,但现在主要集中在地图信息的二维应用上,三维电子地图信息的应用较少,而且主要集中在美国GPS导航系统与城市电子地图结合的应用上,如现在比较成熟的有美国Google公司的Google Earth软件、MapInfo公司的MapInfo软件、Bentley公司的MicroStation软件、加拿大的CLRview软件、瑞士的CyberCity Modeler软件以及我国的Mablockquote GIS软件、VRMablockquote软件[3-4]。我国武汉市测绘研究院卢丹丹等人[5]将全景地图应用在了城市三维建模中;武汉大学朱欣焰等人[6]建立了室內的地理环境;重庆邮电大学空间信息系统研究中心刘兆宏等人[7]制作了室内矢量地图;山东理工大学徐红举等人[8]利用激光与二维码建立了货物配送地图;无锡学院宋仁波等人[9]提出了一种基于多源数据集成的城市建筑物三维建模方法;何洁等人[10]提出了一种适用于商业化地图服务的三维实景建模技术;陆军特种作战学院廖章回等人[11]提出了用无人机进行倾斜摄影测量的城市战场环境三维建模技术。虽然三维地图建模信息已基本成熟,但可以发现,目前对自然界自然事物的三维地图建模技术缺少研究。
因洞穴三维地图信息难以采集,而且我国北斗卫星系统刚刚趋于成熟,因此将洞穴三维地图结合北斗信息的研究还未见报道。本文介绍了一种新的三维洞穴地图建模方法,将洞穴空间信息结合我国北斗地理信息系统,使用国家2000坐标系统,利用设计的山洞断面尺坐标采集装置,运用激光探测系统,利用机械类三维实体造型软件SolidWorks软件,建立了河南省郑州市某洞穴三维地图,通过洞穴三维地图不仅可以得到洞穴空间尺寸,还可以得到洞穴北斗导航地理位置信息。
1 洞穴三维地图建模原理
本洞穴三维地图建模的原理是利用软件绘出山洞断面模型,利用激光测距仪收集山洞内部断面信息,利用北斗导航仪收集测量点位置信息;然后将收集到的山洞断面信息分别输入山洞断面模型,通过软件绘出,形成断面草图;接着根据收集到的测量点位置信息数据,通过软件绘出测量路径;最后把测量路径和断面草图融合,绘出洞穴三维地图。
2 洞穴三维地图建模过程
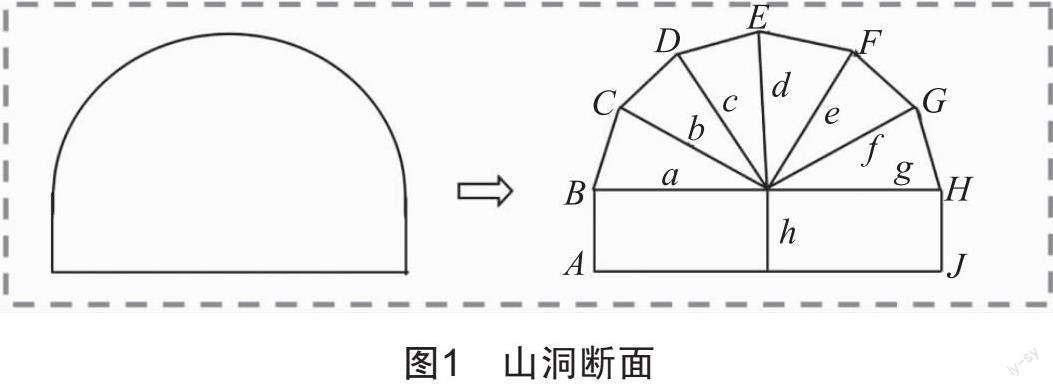
山洞地理形状特殊,规则性较差,一般建筑特征的断面设计难以应用于山洞,因此要设计一种既能够绘出山洞的断面形状,采集山洞的北斗定位信息,又能够通用于不规则形状绘制的方法。经过实地走访勘测、观察,设计了一种通用方法。但同时由于山洞形状特殊,因此尺寸参数涉及较多,将山洞等洞体地理信息分为两部分,一部分为测量点所在的位置,另一部分为测量点所在位置的截面形状、尺寸。一般山洞内部的形状如图1所示。测量点所在的位置可通过北斗导航仪测得,以国家2000坐标为例,表示为X坐标、Y坐标、海拔高度H,其中,X为北斗导航国家2000坐标系X坐标,Y为北斗导航国家2000坐标系Y坐标,H为北斗导航国家2000坐标系海拔高度H坐标,而测量点所在位置的截面形状可通过图1中山洞断面尺寸确定,基本信息设计为:通过激光测距仪测出a、b、c、d、e、f、g、h,根据图1得到的A、B、C、D、E、F、D、G、H、J点,连接AB、BC、CD、DE、EF、FG、GH、HJ、JA,即可得到山洞等洞体的通用截面图形。
测量人员可以在洞内一边行走一边测量,测量点之间位置越近,后面建模得到的三维地图越准确,但后期建模的劳动量也越大,测得的数据可用表格表示。由于地球尺寸巨大,为百万级别,而软件内部所用尺寸最大为万级别,为方便建模,坐标需要根据测试结果及建模对象对导航坐标取相应数量级结果处理,具体见下面实验。一般建立模型时取X坐标、Y坐标的前5位,这样建立出来的模型既不失真,又能反映地理坐标,将x坐标加上3 800 000,即可得X坐标,y坐标加上1 970 000,即可得Y坐标。x为建模所取坐标x,y为建模所取坐标y,建模所取坐标h为胸前中心至地面高度。假定各采集位置及截面尺寸信息已得,打开SolidWorks软件平台,新建零件,进入模型地图建立截面。
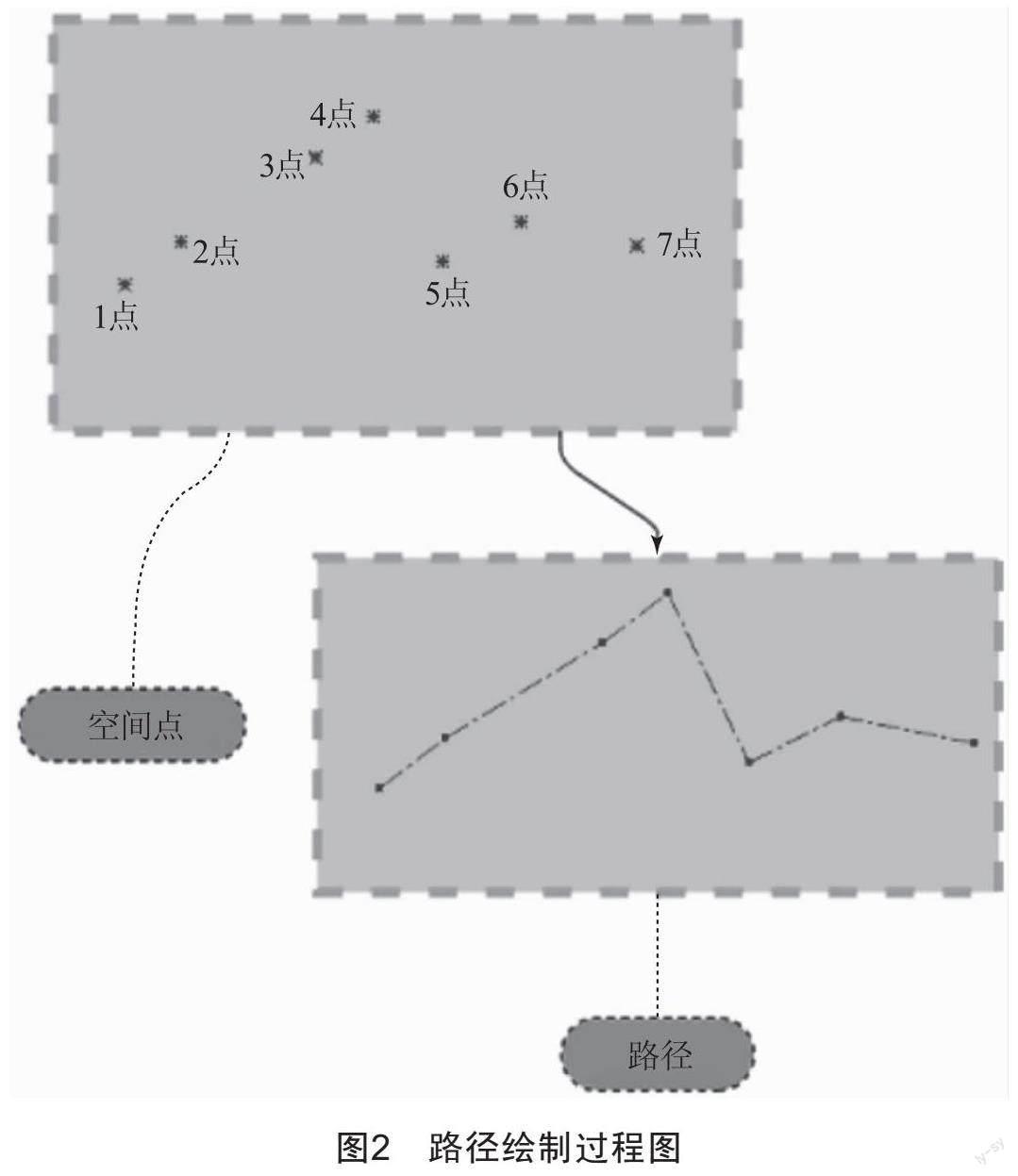
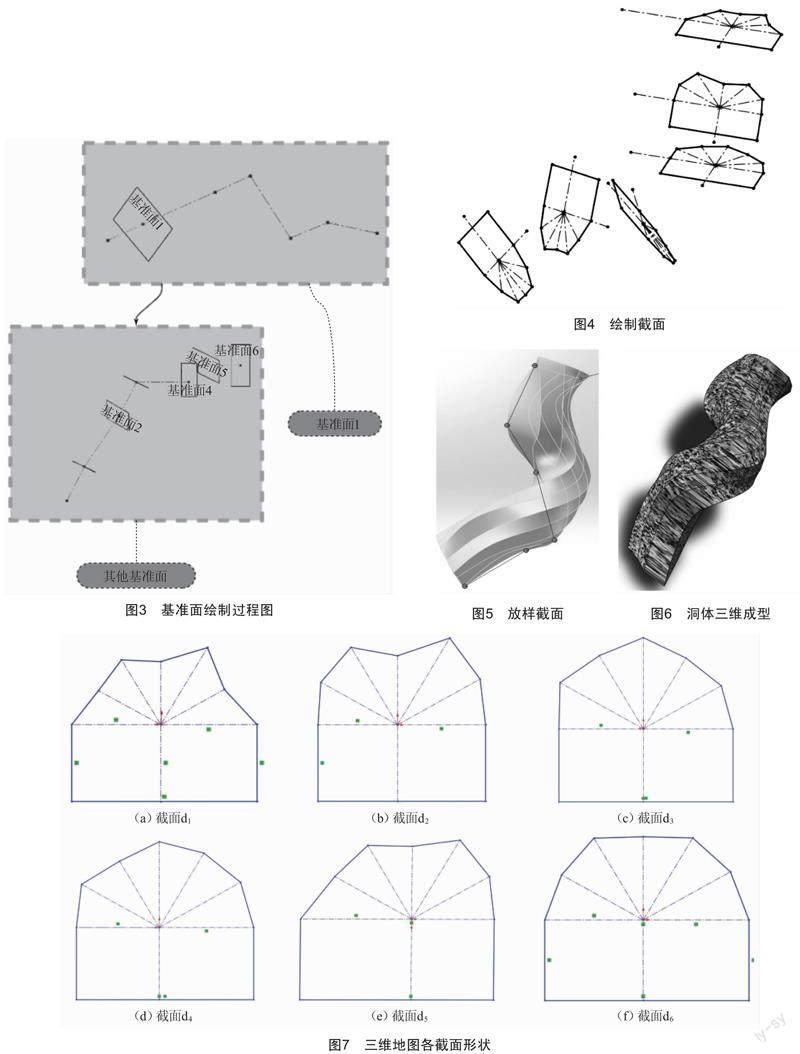
先插入基准面到3D草图,然后绘制点,将绘制的1点现有几何关系在平面上删除,修改绘制点的坐标为已知位置坐标,绘制好1点,然后绘制2点,修改绘制2点的坐标为已知位置坐标;继续重复,画出余下空间点,本示例共有7个位置的信息,画出7点,如图2所示空间点。接着依次连接1点、2点、3点、4点……直至完成路径绘制,如图2所示路径。过2点插入基准面1,基准面1与1点和2点连线垂直,如图3所示。重复在3、4、5、6、7点插入基准面2、3、4、5、6,如图3所示其他基准面。
在基准面1上作2点处截面图形d1,基准面2上作3点处截面图形d2,并依次作出其他截面d3~d6(图4);然后依次从截面1放样到截面6(图5),加入材质,即可形成洞体三维模型(图6)。各截面形状如图7(a)~(f)所示。
这种地图模型建立方法简单方便,使利用SolidWorks等机械类三维软件对山洞等洞体的内部结构进行三维建模成为可能,为后期使用机器人进入内部采集数据后建立洞体地图奠定了基础。此种方法建立的地图内部不但有地形信息,更添加了国家2000坐标系下的坐标信息,为以后我国工程应用提供了方便。
3 实验研究
3.1 实验设备
本文介绍的洞穴三维地图建模方法所使用的山洞断面尺寸坐标采集装置主要包括北斗导航定位设备和洞内距离尺寸采集装置。北斗导航定位设备为ICEGPS 610北斗卫星导航仪(图8),该导航仪15星定位,支持北京54、西安80、国家2000常用坐标格式快速转换;洞内距离尺寸采集装置采用SNDWAY激光测距仪(图9)。
3.2 实验流程
根据图10实验流程,本实验首先需要实验员进入山洞,熟悉所测山洞环境,勘查山洞内部具体情况,然后利用北斗导航仪进行位置信息采集,利用激光测距仪采集山洞横截面信息,并对一些特殊断面进行标记、处理,再通过三维建模软件进行地图建模,得到三维地图模型。
图11为根据实验流程所设计的山洞断面尺寸及坐标采集盒,该采集盒已申请并授权专利,专利号:CN201921858441.X。
3.3 实验研究对象
为了验证所提基于北斗导航的洞穴三维地图建模方法的合理性和有效性,对郑州市尖岗村某洞穴进行勘测与建模,勘测场景如图12所示。
从图12明显可以看出,洞穴与城市环境信息不同,洞穴截面的不规则性导致其三维地图的建立更加困难,要建立一种既能表达洞穴等复杂环境,又能展示地理位置信息的地图更加繁杂。
3.4 实验结果与分析
根据图10中的实验流程,勘测出洞穴内部环境,通过北斗卫星導航仪、激光测距仪得到参数如表1所示。
表1中,X、Y、K表示采集断面位置X坐标、Y坐标、海拔高度H,x、y是X坐标、Y坐标的最后三位,a、b、c、d、e、f、g、h分别为图3所示采集位置距离洞壁面各个方位的距离。据表1建立模型如图13所示。
图13分别为各界面定位信息,因为使用软件单位为毫米,但导航系统单位为米,如为米级绘制,则模型极大,因此可用毫米级别表示。图14为实时采集各信息时山洞内部各处环境,经对比可以看出,通过勘测出洞穴内部信息,结合勘测环境建立的尖岗村某洞穴三维地图,不仅很好地与实际洞穴内部环境融合,而且还能展示洞穴某些特殊位置的特殊信息。该地图基于我国北斗导航系统,采用国家2000坐标系建立,直观、形象地展示了所处位置的环境地理信息,体现了地理环境勘测与三维地图构建的有效性、合理性。
4 结论与展望
本文介绍了一种利用机械类三维建模软件SolidWorks建立洞穴三维地图的方法,将北斗地理信息系统和三维建模技术结合,建立了一种包含洞穴空间尺寸和洞穴北斗导航地理位置信息的三维地图。实验结果表明,采用该方法建立的洞穴三维地图信息更加丰富全面,能够胜任洞穴复杂场景下的三维地图构建,能够应用于洞穴等复杂环境的地图导引,后期如与机器人技术结合,可以实现洞穴三维地图自动采集、自动生成,对于推动空间地图技术的发展具有重要意义。
[参考文献]
[1] 安林芳,宋圆圆.多传感器融合的自动泊车建图定位研究[J].机电信息,2022(9):21-23.
[2] 北斗网.我国北斗三号全球卫星导航系统星座部署提前半年全面完成[EB/OL].(2020-06-23)[2023-01-03].http://www.beidou.gov.cn/yw/xwzx/202006/t20200623_20685.html.
[3] 王青山,王家耀.GIS数据模型研究与实践[J].解放军测绘学院学报,1998(4):296-299.
[4] 百度经验.图解常见的三维GIS软件[EB/OL].(2015-12-11)[2023-01-03].https://jingyan.baidu.com/article/9158e0003428a6a25412281e.html.
[5] 卢丹丹,谭仁春,李维,等.全景地图在城市三维建模中的应用[J].地理空间信息,2016,14(10):56-58.
[6] 朱欣焰,杨龙龙,呙维,等.面向全息位置地图的室内空间本体建模[J].地理信息世界,2015,22(2):1-7.
[7] 刘兆宏,王科,丰江帆,等.矢量室内地图建模与制作方法[J].数字通信,2012,39(4):77-80.
[8] 徐红举,鲁力群,孙萌,等.激光与二维码相融合的AGV自主导引建模与仿真分析[J].重庆理工大学学报(自然科学版),2022,36(10):256-263.
[9] 宋仁波,朱瑜馨,郭仁杰,等.基于多源数据集成的城市建筑物三维建模方法[J].自然资源遥感,2022,34(1):93-105.
[10] 何洁,王悦,董恺.多源数据融合的城市三维实景建模技术应用[J].测绘与空间地理信息,2021,44(12):121-124.
[11] 廖章回,朱伟,韦敏杰.倾斜摄影测量的城市战场环境三维建模及可视化[J].火力与指挥控制,2021,46(10):131-135.
收稿日期:2023-03-24
作者简介:李峰(1981—),男,河南南阳人,博士研究生在读,副教授,研究方向:北斗导航应用及机器人导航控制。
通信作者:金永喆(1966—),男,韩国全罗北道群山人,博士,教授,研究方向:机器人路径规划、人工智能与自动驾驶汽车。
猜你喜欢
红领巾·探索(2022年11期)2023-01-06
小学科学(学生版)(2021年9期)2021-11-02
小学科学(学生版)(2020年12期)2021-01-08
小哥白尼(趣味科学)(2018年10期)2019-01-16
中学生数理化·中考版(2018年10期)2018-12-07
现代装饰(2017年9期)2017-05-25
新闻界(2016年15期)2016-12-20
考试周刊(2016年93期)2016-12-12
今传媒(2016年9期)2016-10-15
考试周刊(2016年70期)2016-09-20
