
人工平动点附近混合推进航天器编队滑模控制保持
2023-06-10 03:21贺京九袁长清龚胜平赵磊
北京航空航天大学学报 2023年5期
贺京九,袁长清,龚胜平,赵磊
(1.空军航空大学 航空作战勤务学院,长春 130011;2.空军航空大学 航空基础学院,长春 130011;3.北京航空航天大学 宇航学院,北京 100191)
在深空探测领域,日地系共线平动点由于其独特的位置及动力学特性而备受关注,目前已有任务也多围绕其展开。随着这一领域的快速发展,传统的单体大航天器已不足以满足日益复杂的任务需求,且其存在制造难度大、项目周期长、所需成本高等劣势。在此背景下,航天器编队飞行[1]技术应运而生。将该技术与平动点任务相结合,可以实现传统单体航天器难以实现的深空轨道任务。
在平动点编队飞行控制方面,部分学者采用近似线性化方法,对编队非线性动力学方程进行适当简化,以此为基础设计编队控制器。如Wang 等[2]利用多项式特征结构配置方法对L2 点处编队进行控制;Peng 等[3]对时变线性二次型调节器(linear quadratic requlator, LQR)方法加以改进,设计了最优周期控制器用于编队构型保持;Bando 和Ichikawa[4]提出了一种基于输出调节理论的新控制策略,对于不同频率的Halo 轨道具有较好的适用性,简化后虽然减弱了控制难度,但是不可避免地导致控制精度和通用性降低。部分学者以编队非线性动力学方程为基础设计控制器,其优势在于较好的鲁棒性和更接近实际情况。Rouzegar 等[5]采用开关SDRE 方法,以较低的能耗实现了在L2 点的高精度编队控制;姜春生等[6]采用自抗扰控制方法,利用非线性误差反馈对动力学未知部分进行补偿,具有较好的鲁棒性;Xu 等[7]考虑平动点附近的非线性扰动,采用HSP 方法实现了L1 点附近准周期轨道上的稳定编队;Wang 等[8]针对多体编队飞行速度不确定因素,提出了一种分布式自适应控制律,保证了系统的全局渐进收敛;He 和Yao[9]通过改进的逐次逼近方法实现L2 点编队的控制;龚胜平等[10]研究了编队基线与所需推力的关系,设计了离散控制策略。
以上研究虽然都取得了较为理想的控制效果,但仍是基于传统的消耗工质获得控制力的方法,或者只给出所需控制力,回避讨论具体如何实现的问题。而深空长航时任务的一个重要问题便是推进系统能量来源,传统的消耗工质的推进方法则从根本上制约了航天器所能到达的位置和有效工作时间。为此,需要发展一种无工质消耗的编队飞行控制技术。太阳帆推进是近年来新兴的一种连续小推力技术,可以在平动点轨道实现传统离散大推力轨控方式难以实现的高精度轨控[11]。其工作原理是:利用太阳光子撞击大尺寸薄膜帆面与航天器产生动量交换,进而产生作用力推动航天器,实现光压力加速飞行。其最大优势在于:整个过程能量来源全部为太阳,自身无需携带推进剂,在长时间作用后能获得很大加速度,非常适合用于长期空间观测。同时由于太阳光压力的引入,航天器能够被放置在距离太阳更近的人工平动点处,这样既缓解了紧张的天然平动点空间资源压力,又能满足更多的任务需求。目前,航天工程界提出了许多太阳帆深空任务的概念[12],如利用太阳帆执行日心悬浮轨道任务[13]、日地人工平动点任务[14]、近地小行星观测任务[15]等。
由于太阳帆面相对太阳光矢量只有2 个姿态角,若仅依靠太阳帆进行控制,则会存在欠驱动问题,且无法产生指向日心的推进力分量。楼张鹏[16]和朱敏[17]采用RCD 型太阳帆,将反射率作为第3 个控制量;龚胜平[11]通过多片帆解决这一问题;陈弈澄等[18]将电推进与太阳帆相结合,通过混合推进实现日心悬浮轨道的位置保持。但RCD 方案的反射率控制设备十分复杂,对制造工艺和控制策略的设计有较高要求;而多片帆方案在空间中不同方向展开也是一大挑战,且增加了控制难度;电推进则仍然受到推进剂数量的限制。目前,已有平动点编队的研究成果中大尺度编队较多,编队间距从几千米到上千千米不等[17,19],对于极近距离编队(百米以下)的研究相对较少。一方面由于极近距离编队要求更高的控制精度,稍有不慎可能导致构型丧失乃至碰撞损坏等后果;另一方面,大尺度编队较常用的离子推进和化学推进等技术由于羽流污染问题无法用于极近距离编队。
针对以上不足,本文考虑引入航天器间库仑力与太阳帆推进技术相结合,采用混合推进方案控制编队。库仑力编队飞行[20]的基本思想是:通过某种手段使得航天器带电(如电子枪发射电子使航天器带正电),在编队内各航天器间形成库仑力,再设计合适的控制策略,通过控制各航天器所带电荷调整库仑力大小和方向,使编队能够以特定的构型完成预定任务。与传统的编队技术相比,库仑编队技术的优势主要在于控制精度高、所需能耗低、无羽流污染等方面[21],这使得其十分适合用于间距在百米尺度乃至更小的极近距离编队。但库仑编队的不足之处在于:库仑力为编队内部力,只能作用于航天器连线方向,无法改变航天器角动量用于转向。二者结合,库仑力可提供指向日心的推进力分量,解决仅依靠太阳帆控制存在的欠驱动问题;太阳帆则可提供连线方向以外的推进力用于转向,改善库仑编队的可控性。
本文研究了日地系人工L1 点附近的极近距离航天器编队的飞行控制问题,提出了一种无工质消耗的控制方法,即将太阳帆推进技术与库仑力编队技术结合组成混合推进编队。推导了混合推进航天器编队在人工平动点附近的相对运动方程,以从航天器太阳帆的2 个姿态角和主从间电荷积作为控制量,设计了编队固定时间滑模控制策略和LQR 控制策略,实现对预设编队构型的展开并保持,通过数值仿真和对比分析验证了设计的有效性。
1 编队相对运动动力学模型
1.1 太阳帆圆形限制性三体问题
建立如图1 所示日地系统质心旋转坐标系Oxyz,坐标原点O为日地公共质心,x轴由太阳质心指向地球质心,z轴与黄道面垂直,指向日地系旋转角速度ω方向,y轴与x、z轴构成右手坐标系。记太阳质量为m1,地球质量为m2,航天器质量与二者相比可忽略不计。
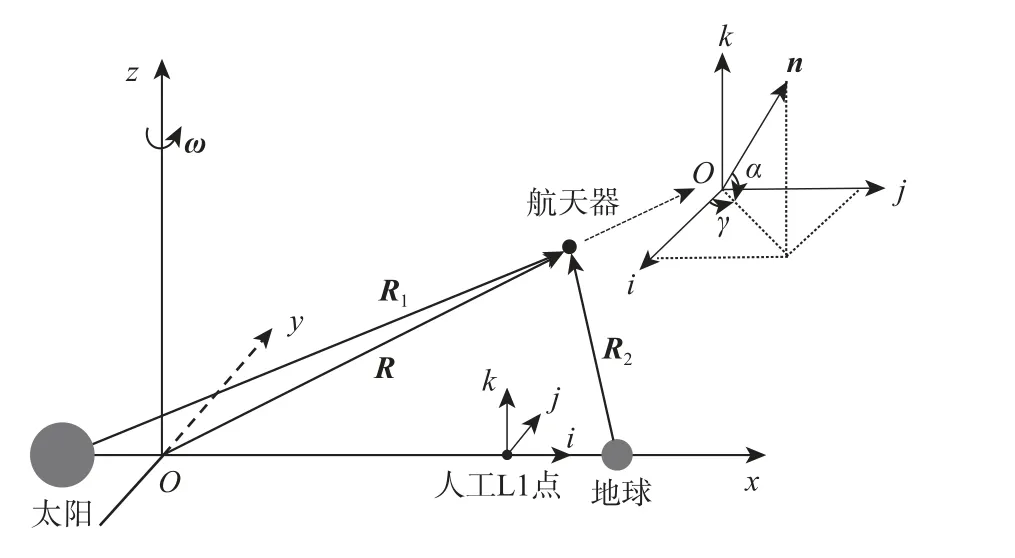
图1 相关坐标系Fig.1 Relevant coordinate systems
记航天器在旋转系Oxyz下位置矢量R=(x,y,z),R1和R2分别为航天器相对太阳和地球的位置矢量,理想太阳帆受到的光压加速度定义为[22]
式中:β为航天器携带太阳帆光压因子;G为万有引力常数;n为帆面法向量。
由牛顿运动定律和万有引力定律可得
为分析问题和计算简便,采用归一化单位处理[17],考虑旋转离心加速度和科氏加速度影响,将式(2)在三轴展开,得到太阳帆圆形限制性三体问题(solar sail circular restricted three-body problem, SSCRTBP)动力学方程:
式中:aS=(aSX,aSY,aSZ);µ为归一化单位制下地球的质量。建立图1 中所示航天器本体坐标系Oijk,原点在航天器质心,三轴方向与旋转系Oxyz相同。记航天器携带太阳帆面俯仰角为α,偏航角为γ,则帆面法向量n表示为
由于航天器到太阳的距离远大于到人工平动点的距离,可将航天器附近太阳光入射矢量即R1的方向向量近似看作与i轴平行,即
将n、R1表达式代入式(1),得到归一化单位下光压加速度在三轴相应分量:
1.2 共线人工平动点及周期轨道
由于太阳光压力的存在,导致航天器在空间中受力平衡发生变化,产生新的人工平动点[8],与天然平动点相比,人工平动点距离太阳更近,这使得航天器在完成诸如对日观测、深空通信中继等任务上具有更优的性能。根据平动点定义,假设太阳光入射方向与帆面垂直,令式(3)中满足:
可得共线人工平动点位置XLi满足:
以人工L1 点为例,由式(7)得到坐标后,以其为原点建立人工平动点局部坐标系L1-ijk,坐标轴方向与旋转系Oxyz一致,如图1 所示。采用Richardson方法[23]构造三阶Halo 轨道,作为编队主航天器的参考轨道。
1.3 编队飞行动力学模型
图2 为主从式航天器编队。记主航天器为Leader,其相对于坐标原点和两中心天体的位置矢量分别为RL=(XL,YL,ZL)T,R1L=(XL+µ,YL,ZL)T,R2L=(XL−1+µ,YL,ZL)T;从航天器为Follower,其相对于坐标原点和两中心天体位置矢量分别为RF=(XF,YF,ZF)T,R1F=(XF+µ,YF,ZF)T,R2F=(XF−1+µ,YF,ZF)T。在 旋 转 系Oxyz下,主、从航天器运动均可由式(2)描述,主航天器通过轨控实现在参考轨道稳定运行,从航天器通过编队控制器实现对预设构型的展开并保持。
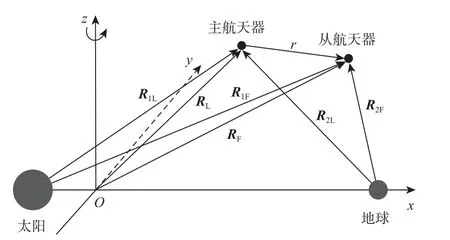
图2 主从式航天器编队Fig.2 Leader-follower spacecraft formations
从航天器相对主航天器位置矢量为
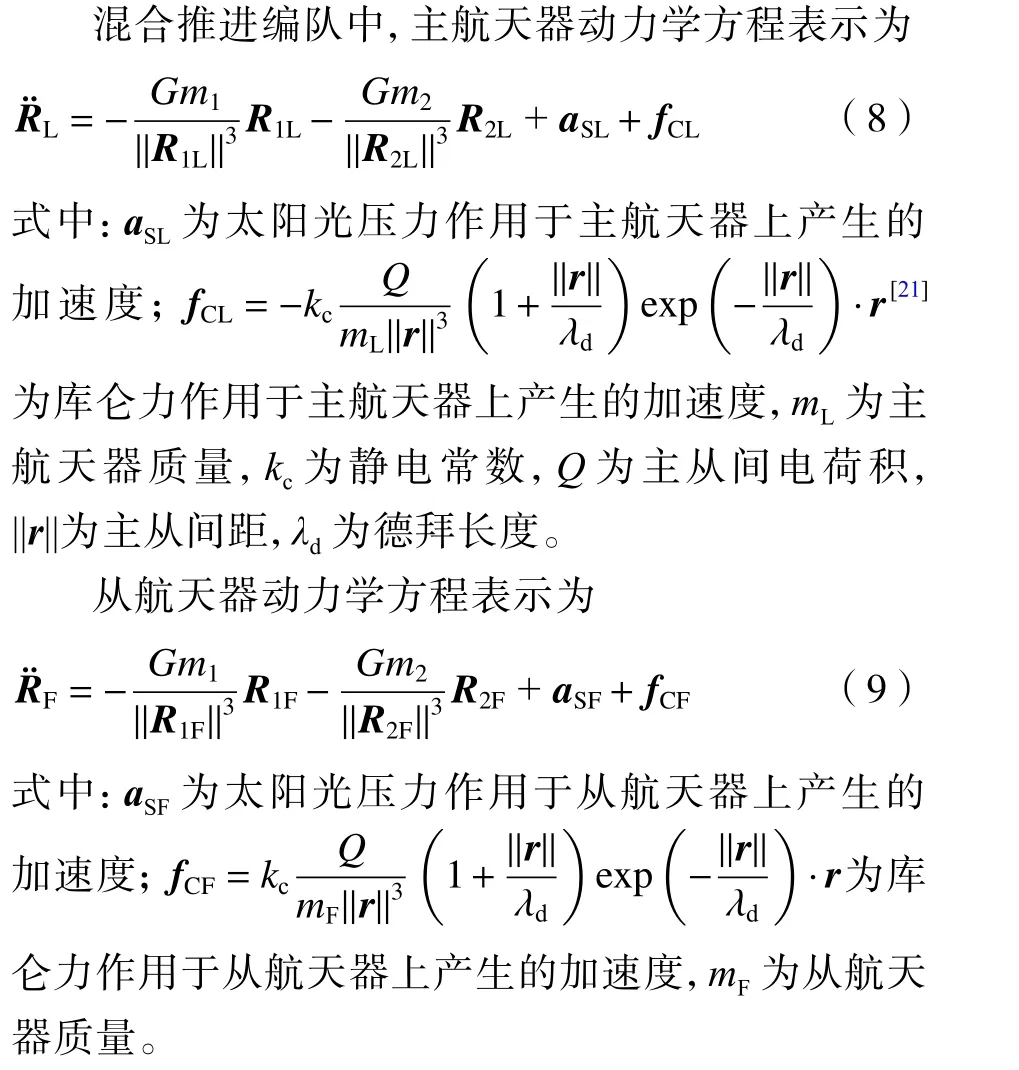
联立式(8)~式(10),整理得到编队相对运动动力学方程:
式中:a=aSF−aSL=(ax,ay,az)T表示从航天器相对主航天器的太阳光压差;fc=fCF−fCL=(fcx,fcy,fcz)T为库仑力产生相对加速度。
2 编队控制器设计
控制目标为设计一个滑模编队控制器,以主从间电荷积Q和从航天器太阳帆的2 个姿态角α、γ作为控制输入,从航天器关于主航天器的相对位置为输出,通过调节输入使得从航天器能够跟踪主航天器并保持期望编队构型。
定义状态变量:
将式(11)改写为如下形式:
式中:
令航天器在期望编队构型下相对主航天器的位置矢量为xd,则位置误差为e=x1−xd=(ex,ey,ez)T,求二阶导数并与式(13)联立得到

且m1、n1、p1、q1为奇数。
选择如下趋近律:
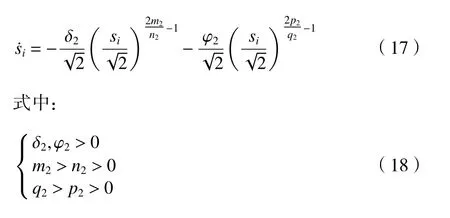
且m2、n2、p2、q2为奇数。
对式(15)求导并与式(14)联立得到
将式(19)与式(17)联立并添加饱和函数,修改得到最终控制输入:
此处饱和函数的作用为防止出现奇异点,具体构造如下:
式中:ζ为消抖界宽。
此时得到的是从航天器应产生的相对主航天器的控制加速度,该加速度由太阳帆光压力与库仑力共同产生,为得到直接控制量电荷积和姿态角,将u改写为如下形式:

故系统为全局稳定且在有限时间T内收敛,T满足:
系统控制结构如图3 所示。

图3 系统固定时间滑模控制结构Fig.3 Structure of fixed-time sliding mode control
3 数值仿真
为验证本文所设计编队控制器的有效性,在MATLAB/Simulink 环境中进行数值仿真。考虑图2所示主从式航天器编队,任务开始前二者组合在一起,此时从航天器关于主航天器的相对位置和速度都为零。任务开始时刻二者分离,主航天器在自身轨控作用下沿构造的三阶Halo 轨道运行,从航天器在编队控制器作用下进行编队构型展开并保持。
编队期望构型为从航天器位于主航天器在x轴正 方 向50 m 处 保 持 相 对 静 止,即||r||=50 m,r=||r||(1,0,0)T,mL=mF=2 000 kg,ζ=0.005,控制参数选取 如 下:① δ1=φ1=7,m1=9,n1=7,p1=9,q1=11;②δ2=11,φ2=9,m2=9,n2=5,p2=7,q2=13。静电常数kc=8.988×109(N·m2)/C2,取徳拜长度λd=60 m,主航天器运行在z轴幅值为2×105km 的Halo 轨道上,主航天器太阳帆光压因子β=0.035,任务时长为3 年。
同时为进一步体现该滑模控制器的优越性能,对式(11)作线性化处理[27],并设计LQR 控制器,控制参数选取如下:Q=diag[5×106,5×106,5×106,1,1,1],R=diag[100,100,100],Q、R为控制过程中的加权矩阵。
图4 和图5 分别给出主航天器在旋转系Oxyz中的绝对轨迹和从航天器的相对运动轨迹。由图5可以看出,在编队展开的过程中,滑模控制策略下从航天器并不是沿着直线运动到期望位置再与主航天器保持相对静止,而是伴随着偏移与转向,最后在期望位置附近作小范围周期运动,y、z轴误差为厘米量级。
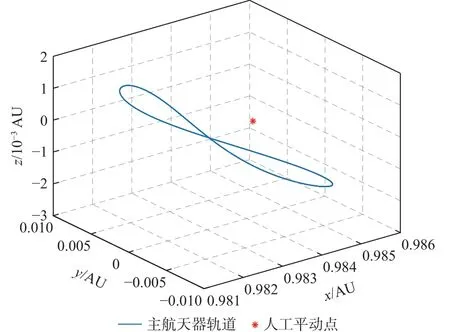
图4 主航天器参考轨道 (AZ=2×105 km)Fig.4 Reference orbit of leader craft (AZ=2×105 km)
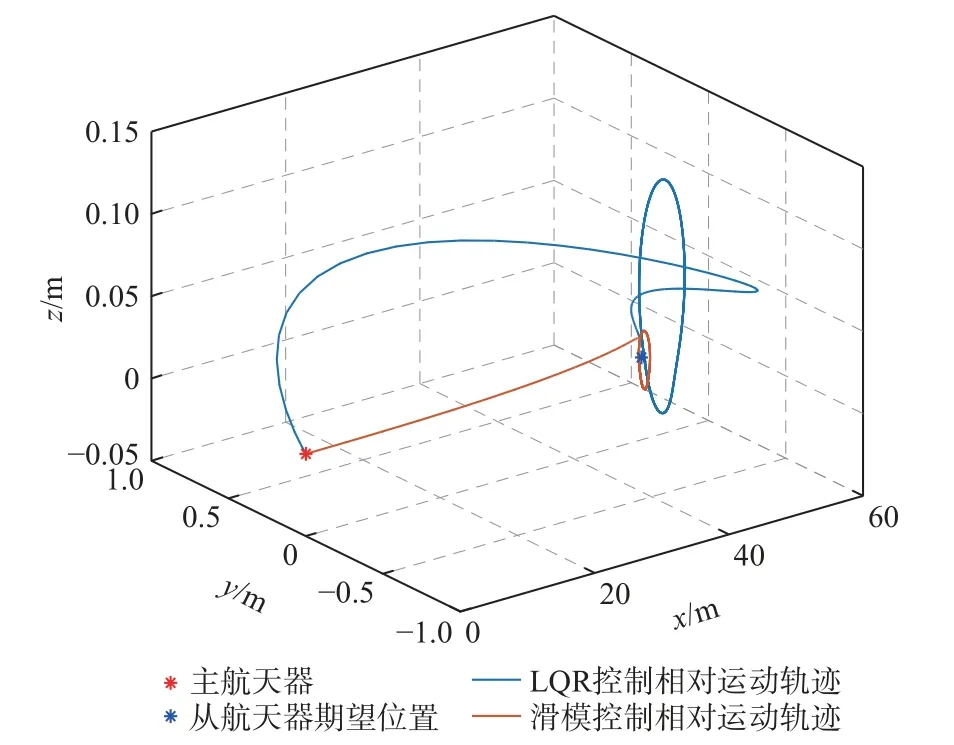
图5 相对运动轨迹Fig.5 Relative motion trajectory
图5 中蓝色线为采用线性化动力学方程和LQR 控制器的相对运动轨迹。可以看出,编队在展开期间有较大偏差,从航天器y轴方向最大误差达到米级,且与滑模控制缓慢减速靠近期望位置不同,从航天器是先越过了期望位置,随后再有一个比较剧烈的转向和后退,最后在期望位置附近周期运动。稳定状态下y轴误差在−0.25~0.05 m 范围内波动,z轴误差在−0.03~0.11 m 范围内波动。
图6 为从航天器x轴相对位置误差曲线。可知,任务开始后,滑模控制策略下从航天器迅速展开,在0.4 [TU]([TU]为归一化条件定义的时间单位,约23 天)左右的时间里基本到达指定位置,随后编队进入保持构型状态。x轴最大误差略小于0.4 m。LQR 控制策略下编队展开速度相比滑模控制减慢,约在0.6 [TU]时进入稳定保持状态,且展开过程中出现了明显的超调,最大值约为3 m,随后从航天器后退靠近期望位置,稳态位置误差约为1 m。
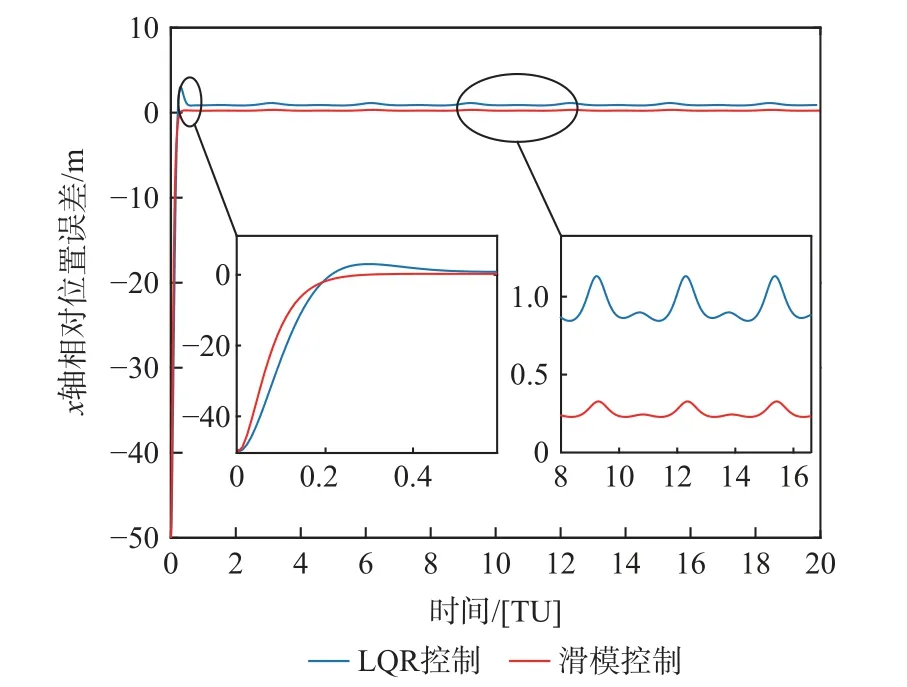
图6 x 轴相对位置误差Fig.6 Relative position error of x axis
图7 给出滑模控制策略下编队由展开到保持过程中从航天器需要产生的相对加速度曲线。根据推进力的变化特点,可将任务过程分为3 个阶段:任务开始到0.05 [TU]为展开前段,0.05~0.4 [TU]为展开后段,0.4 [TU]以后为保持段,分别代表从航天器加速远离主航天器、减速靠近期望位置和稳定保持编队构型。起步阶段由于需要使主从迅速分离,产生的加速度较大,达到10−5m/s2量级,对应推力大小约为几十毫牛;在展开后段减速靠近期望位置过程中,加速度较小而作用时间相对较长,能有效提高控制精度;保持段加速度稳定在10−7m/s2量级,在附近小范围波动。
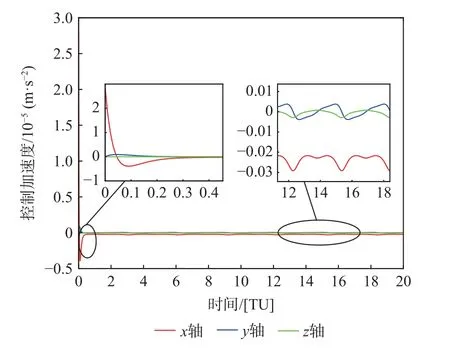
图7 三轴相对加速度Fig.7 Relative acceleration of 3 axes
图8 给出主从间电荷积的变化曲线。在展开前段为正值,主从间库仑力表现为排斥力,表明本阶段库仑力与光压力在x轴分量方向相同,共同将从航天器推离。在展开后段,电荷积由正转负,库仑力由斥力变为吸引力,方向与光压力在x轴分量相反,从航天器由短暂有力的加速状态转为缓慢平稳的减速状态。由于库仑力与距离平方成反比,随着主从距离增大,电荷积的数量级相比展开前段显著上升。整个任务阶段电荷积变化连续平稳,库仑力没有间断和突变,有利于编队整体的稳定性和提高控制精度。
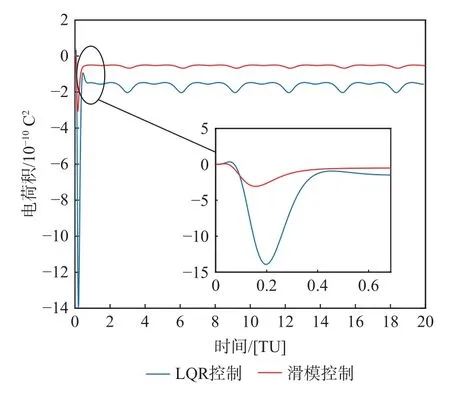
图8 主从间电荷积Fig.8 Charge product between leader and follower
相比滑模控制,LQR 控制下电荷积有显著增大,这是由于展开时从航天器在Y轴方向有较大偏差,稳定状态下电荷积略大。
图9 给出从航天器太阳帆姿态角变化曲线。对于滑模控制策略,在整个展开段,姿态角各自向单一方向发展,帆面法向量持续偏离入射光方向,光压力逐渐减小,由偏离方向推断出从航天器运动方向与仿真结果一致。观察图4 轨迹可以发现,由于从航天器经侧方进入保持段过程中在Y方向上未发生转向,姿态角γ在展开段是单调增加的,且主航天器参考轨道关于x-z平面对称,因此姿态角γ的波动范围也是正负对称的。姿态角α在0.04 rad时转向,这是由于在展开段从航天器向期望位置靠近时是先向上偏移的,0.4 [TU]时z轴位置为2 cm,随后开始向下转。且z轴方向上下相对位置误差不同,正方向误差值小,对应所需控制加速度小,则所需姿态角大,负方向误差值大则所需姿态角小,因此姿态角α在正方向上的波动大于负方向。
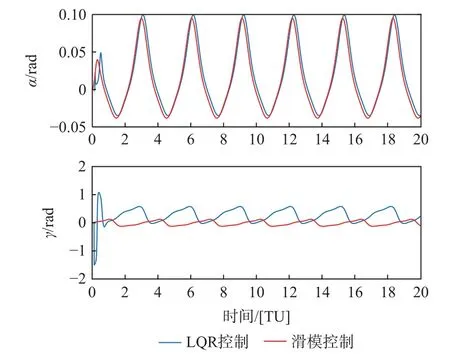
图9 从航天器太阳帆姿态角Fig.9 Attitude angle of follower’s solar sail
LQR 控制策略条件下,在展开初期姿态角γ偏转接近−π/2 rad,太阳光压在X轴正方向能提供的加速度显著减小,这一部分需要库仑力补充,这一过程中姿态角γ也经历较为剧烈的变化。稳定状态下姿态角α与滑模控制相比有较小的相位差和幅值差,姿态角γ在−0.02~0.6 rad 范围内波动,这意味着LQR 控制所需的能耗要高于滑模控制。
此外,本文将固定时间滑模控制与孙炳磊等[28]设计的最优滑模控制进行了比较,限于篇幅原因此处只给出结果,如表1 所示。可见,最优滑模控制虽然使编队更快展开,但是其代价是稳态位置误差较大和更大的控制力,且该方法在控制过程中会使得太阳帆的姿态角γ偏转角超过π/2 rad,这将导致从航天器失去一个方向的转向力,显然是不可取的。

表1 两种控制方法性能指标Table 1 Performance indicators of two control strategies
4 结 论
本文主要研究了近距离混合推进航天器编队在共线人工平动点附近的控制问题,通过数值仿真可以得到以下结论:
1)太阳帆-库仑力混合推进方法配合较好,二者结合能有效取长补短,既解决单太阳帆的欠驱动问题,又改善了库仑编队的可控性。
2)相比于线性化条件下的LQR 控制,非线性条件下的滑模控制在控制精度、所需时间、能量消耗和编队展开路径的合理性等方面都更优。
3)在时长3 年的编队任务中,从航天器在滑模控制条件下仅用约23 天到达指定位置,这表明该方法能实现编队的快速展开。基线误差在任务要求的1%以内,可认为具有较高精度,有效维持了编队构型。
4)从航天器太阳帆姿态角及主从电荷积波动都处于较低水平,维持编队构型能耗很低。
5)编队正常工作所需能量全部来自于太阳,摆脱了深空长航时任务所面临的燃料限制,具有重要意义。
本文所提出的混合推进方法可用于日地共线人工平动点附近的近距离航天器编队,后续会进一步改进控制策略,以期使编队能够更快展开且精度更高。
猜你喜欢
国际太空(2022年7期)2022-08-16
地震研究(2021年1期)2021-04-13
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
中国地震(2015年1期)2015-11-08
科学24小时(2015年4期)2015-09-10
太空探索(2015年5期)2015-07-12
振动工程学报(2015年2期)2015-03-01
计算物理(2014年1期)2014-03-11
