
波浪能转换装置主动控制研究现状与发展
2023-06-16 11:32王振春王年果
燕山大学学报 2023年3期
王振春,王年果,栾 锋
(1.燕山大学 智能控制系统与智能装备教育部工程研究中心,河北 秦皇岛 066004;2.燕山大学 河北省工业计算机控制工程重点实验室,河北 秦皇岛 066004)
0 引言
海洋中蕴含着丰富的海洋能,其中波浪能约占海洋能总量的25.5%,是一种可再生的清洁能源,有着广阔的开发和利用前景[1]。与广泛应用的太阳能和风能相比,波浪能因具有可转化性强、能流密度高、可预测性强等特点,成为了各国科技工作者的研究热点[2-3]。波浪能发电是人类利用波浪能资源的主要方式[4],在边远海岛供电、海洋工程设备供电、水下机器人离岸作业能源供给、海洋国防工程和国家能源结构改革等方面都具有日渐重要的现实意义。
近年来,世界各国都在积极开展波浪能发电技术的研究和探索,研究人员通过波浪能转换装置(Wave Energy Converter,WEC)捕获和利用波浪能。WEC 系统通过能量输出系统(Power Take-Off,PTO)提供的控制力进行主动控制,控制目的有两个:①最大化能量捕获;②不违反系统的物理约束。
在波浪能转换过程中存在能量转换效率低和发电成本高等问题,其原因包括以下三个方面:①WEC 装置实际运行过程中漂浮或潜没在海水中,由于水动力学的复杂性[5],在真实海洋环境下难以建立精确的系统控制模型。②波浪运动是一种复杂的随机过程,因此波浪能发电系统的最优控制具有非因果性,即当前的控制策略需要基于未来的波浪信息。目前的波浪预测精度有限,限制着WEC 系统的性能[2]。③为捕获更多的波浪能,需主动施加PTO 控制力使WEC 系统的固有响应频率与波浪频率逼近。而PTO 系统在施加控制力的同时会产生无功功率,影响波浪能发电系统的能量转换效率。因此,改善模型失配、降低波浪预测精度和优化有用功率是波浪能发电系统控制方面亟需解决的问题。
目前,以英国、日本、挪威和瑞典为首的超过28 个国家和地区建设的波浪电站总装机容量超过8×105kW[6],波浪能发电技术表现出良好的发展前景。本文介绍了波浪能发电技术的原理和波浪能发电系统控制模型,阐述了WEC 系统早期的控制方法和现代控制技术的发展。最后,对未来波浪能转换装置控制技术的研究趋势进行了展望。
1 波浪能发电装置
1.1 波浪能发电装置分类
波浪能发电系统通过WEC 捕获波浪能,再经过PTO 系统将捕获的波浪能转换为电能。为了高效地利用波浪能,各国学者研发了多种多样的WEC 装置。其中,第一代波浪能转换装置振荡水柱式(Oscillating Water Column,OWC)是20世纪80年代各国学者的主攻方向,研究时间较长,建立了多个示范电站[7],著名的有英国的沿岸固定式LIMPET 和澳大利亚的500 kW 漂浮式OWC 等。随后,涌现出了鸭式、摆式、筏式等振荡浮子式波浪能装置和收缩波道式波浪能装置,著名的有英国的索尔特鸭、苏格兰的Oyster 原型、英国的McCabe 波浪泵和丹麦的Wave Dragon 等[8]。点吸收式是第三代波浪能转换装置,具有体积小、建造费用低和转换效率高等优点,适合建成波浪能发电场,是目前各国学者研究的热点,已建成的点吸式装置有AquaBuoy 装置和阿基米德波浪摆等[9]。各类波浪能转换装置的示意图如图1 所示[8-9]。

图1 各类波浪能转换装置示意图Fig.1 Schematic diagram of various wave energy converters
我国对波浪能发电装置的研究始于20世纪80年代,虽晚于欧美等发达国家,但技术并不落后。中国波浪能发电技术的研究成果有:中科院广州能源研究所研发的岸式OWC、鸭式系列、哪吒系列和鹰式系列波浪能装置;广东海洋与渔业服务中心和华南理工大学研发的摆式波浪能装置;中船重工701 研究所研发的筏式液压“海龙I号”波浪能装置;浙江海洋学院研发的自保护浮子式、集美大学研发的摆式“集大I 号”和中国海洋大学研发的浮子式“海灵号”等,上述WEC 装置都经过了海试运行[10]。目前国内已并网发电的波浪能装置是由中国科学院广州能源研究所研发的鹰式WEC 装置“万山号”和“先导一号”,如图2所示[11]。
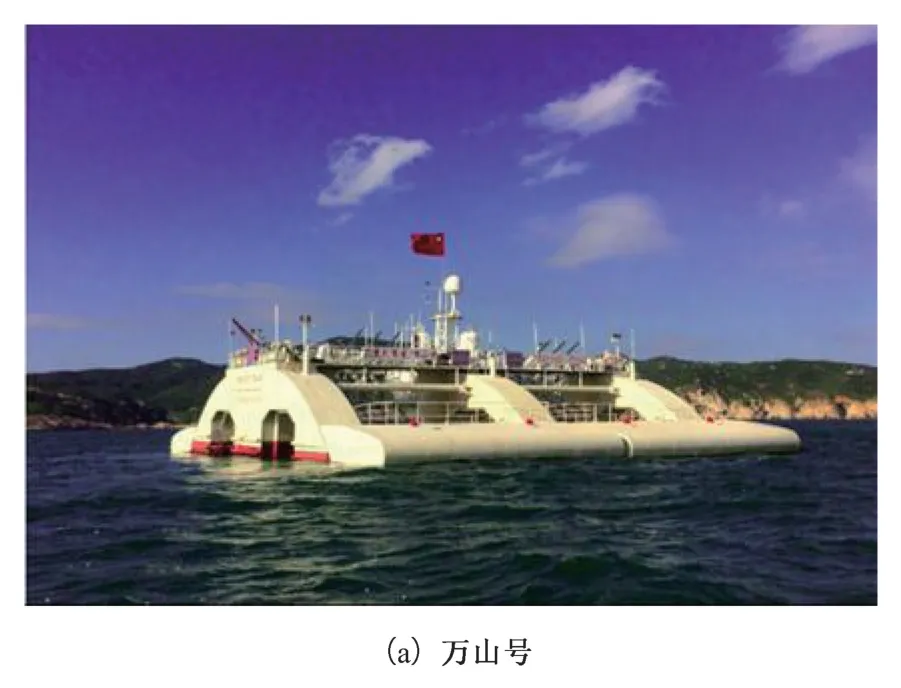
图2 鹰式WECFig.2 Sharp eagle WEC
除收缩波道式WEC 外,其他WEC 装置的转换原理可总结为:将波浪能转换为振荡体(浮体、海水和空气等)的机械能[2]。PTO 系统将WEC 捕获的机械能通过传动系统转换成旋转机械能驱动旋转发电机发电,或省去传动系统直接驱动直线发电机产生电能,原理图如图3 所示。图3 中Fh是水动力,̇x是WEC 系统的状态,Fu是PTO 系统施加的控制力,i为产生的电流。

图3 波浪能转换过程Fig.3 Wave energy conversion process
1.2 波浪能转换装置模型
WEC 系统振荡体的种类有:OWC 装置内部的振荡水面、垂荡点吸式的浮子和摆式装置的襟翼等。振荡体的建模方法类似,根据牛顿第二定律,WEC 系统的动态方程可表示为[12]
式中:m∈Rn×n是质量矩阵,n为系统的自由度;x∈Rn是系统的位置矩阵;Fh、Fu、Fs∈Rn×n分别是描述水动力效应、PTO 力和影响系统的其他作用力的矩阵,其他作用力包含浮体的系泊力[13]和液压装置的摩擦力[14]等。一般假设波浪作微幅运动,水动力效应包含静水恢复力、辐射力和波浪激励力,可将式(1)表示为著名的康明斯方程
式中:k∈Rn×n是静水刚度矩阵;η是入射波高;ma∈Rn×n是附加质量矩阵;hr、hex∈Rn×n分别是由边界元法得到的辐射力和波浪激励力的卷积核[15]。施加PTO 控制力会使得WEC 的运动幅度显著增大,这种情况下将不满足微幅波浪理论,对WEC 装置建模时,还需要考虑非线性水动力效应,如傅汝德-克雷洛夫力、散射力和粘性力等[16]。
2 波浪能转换装置的控制方法
2.1 早期控制方法
对WEC 施加控制力的实质是干扰波浪和振荡体的运动,使它们达到共振,以提取更多的波浪能。为了最大化地获取能量,Falnes 等[17]在假设入射波幅小、不考虑相关约束的前提下,提出了复共轭控制(Complex Conjugate Control,CCC)和幅值相位控制(Amplitude and Phase Control,APC)两种方法来优化有用功率。其中,CCC 理论设PTO 力与WEC 装置振荡体的速度成正比[17]
式中:是Zi(ω)=Ri(ω)+jXi(ω)的复共轭,Zi(ω)、Ri(ω)和Xi(ω)分别是WEC 系统的等效电阻分量、等效电抗分量和等效内阻抗;Fu(s)和ẋ(s)分别是PTO 力和WEC 系统振荡体速度的拉氏变换。
式中:(s)和Fex(s)分别是WEC 系统最佳速度和波浪激励力的拉氏变换;φ是振荡体和波浪运动的相位差。
上述原理可总结为在复频域内,根据WEC 系统的速度、位移或波浪激励力等信息来调节PTO控制力,使系统固有频率逼近波浪的振荡频率,其原理如图4 所示。
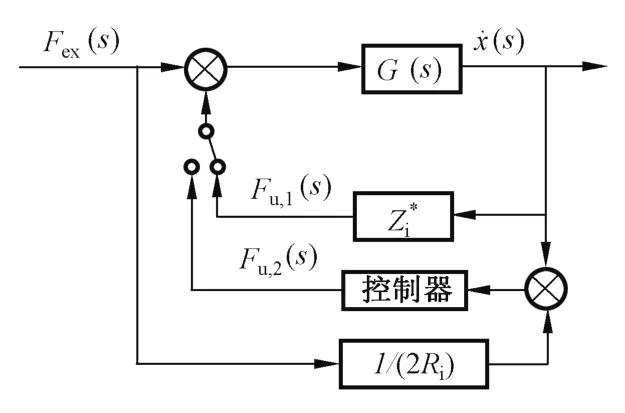
图4 复共轭控制和幅值相位控制切换框图Fig.4 Block diagram of switching between CCC and APC
图4 中G(s) 是WEC 系统的传递函数,Fu,1(s)和Fu,2(s)的选择代表复共轭控制和幅值相位控制之间的切换。基于上述控制理论,Beiro[18]将近似最优速度跟踪控制应用于荷兰阿基米德波浪能发电装置,并证明了控制方法的有效性。
对WEC 施加控制力的同时也产生了从PTO系统流向WEC 的无功功率流。为了避免无功功率对能量转换效率的影响,Guenther 等[19]提出了一种不需要施加PTO 力的控制方法,称为闭锁控制。通过一个机械结构将浮子在波谷时锁定在固定位置,在下一个波峰时释放,以减缓WEC 系统的固有频率。与该方法相对应,Babarit 等[20]和Teillant 等[21]提出了离合控制,思想是在适当的时间将PTO 系统与WEC 系统断开再接入。研究表明,当装置的谐振周期大于波浪周期时,离合控制可以大幅提升波浪能的提取效率。还有学者将两种方法结合使用,效果更佳[22]。闭锁控制和离合控制的原理示意图如图5 所示。

图5 闭锁控制和离合控制Fig.5 Latching and declutching control
2.2 近期控制方法
早期的控制方法主要基于简化的线性控制模型,优化策略都与频率相关,不同的频率需要对应不同的控制策略。在单一频率的规则波中可以很好地应用,但在实际的不规则海浪中应用效果较差。此外,早期的控制方法没有考虑系统的约束,在无约束条件下,控制器求得的最优控制力通常不切实际,且WEC 的剧烈运动也会减少设备运行寿命甚至使其直接毁坏。WEC 控制存在的这些问题,促使研究人员不断地探索新的控制方法来解决早期研究存在的不足。
2.2.1 考虑非线性因素
线性模型相对简单,计算效率较高,在某些情况下使用线性模型是有效的[13]。但主动控制在提高系统能量捕获的同时,加剧了WEC 装置的运动,引入了不可忽略的非线性因素。
解决WEC 控制的非线性问题,有两种思路:
1) 考虑具体非线性水动力学因素,建立更加精确的系统模型。Richter 等[13]提出了一种非线性模型预测控制(Model Predictive Control,MPC)方法,在对双体点吸式WEC 建模时考虑了非线性系泊力,研究表明在线性海况下采用线性模型是可行的;但在非线性海况下,非线性模型则表现出更高的能量转换效率。O′sullivan 等[23]基于点吸式WEC,首先研究了不考虑非线性粘性力对功率吸收的不利影响,然后分别在优化中考虑非线性粘性力、在MPC 算法中考虑线性粘性力,结果表明,线性粘性MPC 能够达到和非线性MPC 相当的结果。Bacelli 等[24]基于伪谱控制将非线性粘性阻尼引入铰链襟翼WEC 控制模型,结果表明非线性控制器显著地提高了能量捕获和能量耗散之比。Retes 等[25]提出了一种非线性自适应闭锁控制,研究了傅汝德-克雷洛夫力在点吸式WEC 中的非线性效应,该控制方法可以通过调整相应参数来适应设备的非线性行为。结果表明,基于非线性模型计算的控制参数更高效。不同于上述研究,Do等[26]指出非线性因素应是振荡体和波浪速度之差的二次函数,通过扰动观测器来估计出现非线性水动力时的波速,提出了一种非线性控制方法。除考虑具体的非线性项之外,还有学者通过自适应算法根据海况变化在线估计和更新控制模型,从而提高模型精度,减少非线性因素的影响[27-28]。
2) 考虑非线性项和参数失配等不确定性因素,提高控制算法的鲁棒性。Zhan 等[29]提出了一种鲁棒反馈MPC 策略,目的是确保能量最大化的同时应对入射波造成的持续外部干扰,结果验证了该方法的鲁棒性。Wahyudie 等[30]针对模型中存在的不确定性,采用H∞理论设计了一种简单的超前-滞后补偿器,确保了控制器的鲁棒性和跟踪特性。Zhang 等[31]提出一种鲁棒非线性最优控制方法,通过设计滑模控制器来补偿未建模的WEC动力学和波浪预测误差,增强了系统的鲁棒性。Ni 等[32]针对筏式Pelamis WEC 提出了一种基于波浪参数的自适应阻尼控制策略,通过将阻尼定义为波浪参数的函数来实现自适应阻尼的数值模拟。研究表明,该控制策略有效地提高了系统在非线性波浪中的发电效率,提高了系统的鲁棒性。解决非线性问题的两种思路见表1。

表1 解决非线性问题的两种思路Tab.1 Two ways to solve nonlinear problems
考虑非线性因素也增加了计算的复杂度,使得控制方法在实际应用中较难实现。Nguyen等[33]提出了一种连续自适应的“PI”控制策略,针对代表性海况离线预计算最佳增益。结果表明,虽然控制效果是次优的,但显著地减轻了计算负担。Na 等[34-35]基于自适应动态规划概念,采用临界神经网络来逼近与时间相关的最优成本值,降低了计算成本。伪谱控制在性能实现和计算效率的平衡方面也表现出很好的潜能[36-37]。对于MPC算法,可通过线下调参[31]、采用快速约束优化方法[38]、引入软约束开发凸性成本函数[39]和设计提前预测机制[40]等方法减少计算量。
文献[16]将实海况分为三种情况:线性海况、非线性海况和高度非线性海况。在线性海况下,采用线性模型是可行的;在非线性海况下,应仅考虑相关的非线性效应,以避免额外的计算成本;高度非线性的情况下,波浪能转换装置将停止工作进入自我保护模式。
2.2.2 引入波浪预测信息
为了在不规则波中实现更好的控制效果,WEC 系统的控制需要引入振荡体未来的速度信息(如复共轭控制和最佳速度跟踪控制)和未来波浪激励力的信息(如相位幅值控制、闭锁控制和离合控制)。虽然因果控制可避免波浪预测的硬件成本,但与将波浪预测纳入控制所增加的能量输出和装置安全性相比,这种额外的硬件成本可忽略不计[14,41]。目前开发的波浪预测技术有卡尔曼滤波器[42-43]、自回归预测方法[44-45]、确定性海浪预测方法[46-47]和人工神经网络预测技术[48-49]等,可用于非因果控制。
Babarit 等[50-51]为了将闭锁控制应用于随机波浪,提出了一种实时闭锁控制方法,该方法基于未来的波浪激励力来优化闭锁控制序列,结果表明显著提高了装置在随机波中吸收的功率。Li 等[52]基于动态规划算法,采用实时确定性海浪预测技术结合近似最优的Bang-Bang 控制,对点吸式WEC 进行非因果控制,结果表明与因果控制相比,该控制方法可使能量输出至少增加两倍,且对波浪预测的精度要求较低。Zhan 等[53]提出了一种反馈非因果MPC 策略,将短期海浪预测信息明确地纳入MPC 策略中。研究表明,该方法可广泛地应用于需要满足约束,且受到可预测干扰的能量最大化问题。文献[41]为了考虑未来入射波的影响,提出了一种由因果线性状态反馈和非因果线性前馈组成的WEC 线性最优控制器。结果表明,利用波浪预测信息的非因果项对最优控制和能量输出都有较大的贡献。Li 等[54]提出了一种基于短期波浪力预测的实时闭锁控制算法,根据灰色模型预测波浪力、优化控制力,通过交替锁定和释放浮标来最大化功率提取。实现非因果控制的控制方法见表2。
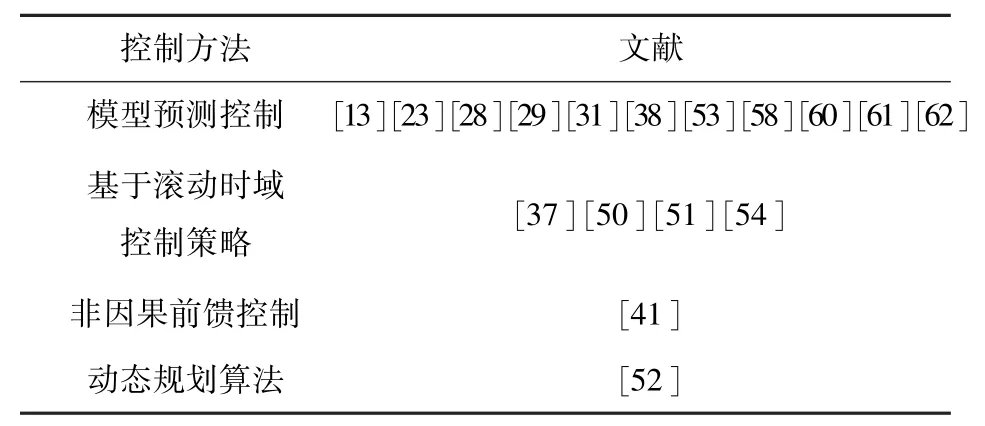
表2 实现非因果控制的控制方法Tab.2 Methods for realizing noncausal control
引入波浪预测信息,WEC 能够捕获更多的波浪能,但存在的预测误差也会限制WEC 的性能。Fusco 等[55]提出了一个频域模型,用于估计波浪激振力的预测误差对非因果控制律计算的参考速度和吸收功率的影响。该模型可以很容易地从预测器和非因果定律中导出,并推广到其他非因果控制方法。Zhang 等[56]以一种多浮点多运动的WEC设备M4 为例,设计了一种新的非因果线性自适应滑模观测器,该控制方法在提高能量转换效率的同时,能有效地缓解波浪预测误差引起的控制性能下降且适用于大范围海况。设备M4 如图6所示[56]。
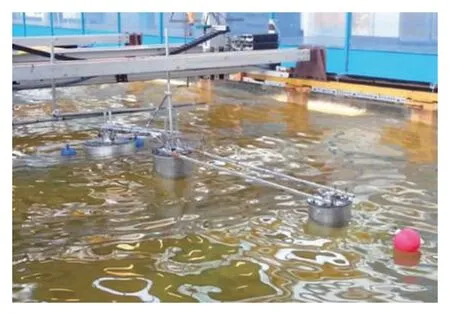
图6 M4 WEC 的示意图Fig.6 Schematic diagram of M4 WEC
2.2.3 考虑PTO 系统损耗
对WEC 的主动控制需要PTO 系统与电网之间的双向功率流,这意味着PTO 系统消耗的能量可能与产生的能量相等甚至更大。各类PTO 系统,如空气涡轮机、水涡机、高压液压系统和直驱式系统等存在不同的非线性效应[16,57]。因此PTO系统的能量损耗和非理想因素不容忽视。Wahyudie 等[30]设计了一个超前-滞后补偿器,其目标是最大化系统鲁棒性的同时最小化PTO 装置的控制力,限制PTO 系统的功率损耗。Son 等[58]在状态空间表达式中建立了浮子和PTO 系统耦合动力学的数值模型,考虑了永磁直线发电机的机电转换效率。研究表明,该方法表现出更高的能量提取峰值和更宽的捕获带宽,显著优于被动控制和恒定阻尼系统。De 等[59]认为发电机中的铜损耗显著地影响系统的整体效率,提出了一种考虑发电机铜损耗和振荡系统最大偏移约束的闭锁控制策略,以便从波浪中提取更多的能量。Bacelli等[24]通过效率曲线模拟PTO 系统损耗来降低计算复杂度,从而处理PTO 系统的非线性效应。
在模型预测控制中,可将PTO 系统的损耗以软约束的形式表示在性能函数中,如Nielsen 等[60]为动力输出轴中的扭矩提供二次权重,使功率输出的优化依赖于功率转换中的损耗模型;Xiong等[61]考虑了PTO 系统的阻尼约束,将功率最大化的二次规划问题重新表述为一个混合整数二次规划,以避免在优化控制的过程中产生负功率;Hansen 等[62]在MPC 的目标函数中直接包括基于离散流体动力系统的PTO 系统损耗模型,研究表明,与无功控制算法相比,年收获能量增加了14.6%。考虑PTO 系统损耗的方法见表3。
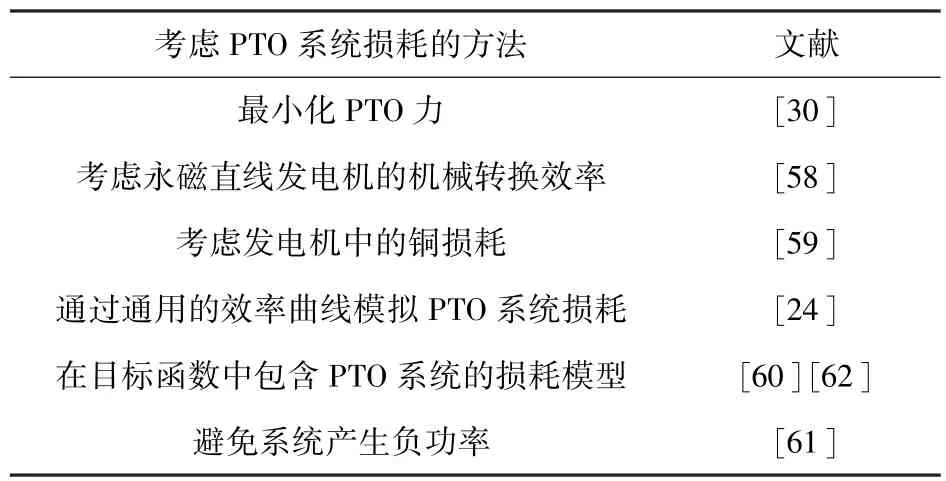
表3 考虑PTO 系统损耗的方法Tab.3 Methods of considering PTO system loss
随着控制技术的发展,各国的学者提出了如MPC 算法、伪谱控制和自适应控制等方法,处理WEC 控制问题的非线性、非因果性和PTO 的功率损耗等问题。其中,MPC 算法具有较强的鲁棒性,对于WEC 系统的控制是一种较成熟的控制方法,具有很好的研究前景[63-64]。
3 控制技术的发展趋势
对WEC 实施有效的控制可以大幅提高其能量转换效率,虽然在控制方法上已经取得了一定的研究成果,但仍面临着很多的挑战。WEC 系统存在的不确定性因素仍然是亟需解决的关键问题,非因果控制中的波浪预测误差仍限制着WEC的性能。随着研究的深入,新的问题也不断涌现。由于控制算法需要较长的计算时间,实时控制技术在实际应用中较难实现。除PTO 系统损耗外,波浪能发电系统其他各部分之间的耦合关系也不容忽略。为了提高波浪能转换装置的能量转换效率,需要深入地研究WEC 的控制问题,发展更有效的控制技术。
3.1 人工智能技术
人工智能由于自身的优点逐渐被开发应用于波浪能发电系统。针对水动力学模型的失配和波浪预测存在的误差,神经网络[34-35]、自回归算法[32]和支持向量机[65]等机器学习算法已经被用于模型辨识和波浪预测。研究表明,机器学习算法的应用能有效地减少建模过程和波浪预测中存在的误差,提高WEC 控制系统的鲁棒性。人工智能技术还可用于WEC 的控制,Anderlini 等[66]首次将深度强化学习应用于WEC 的控制,在线性模拟环境中,根据MPC 在多个海况下收集的数据初始化深度学习代理。结果表明,该智能体在波高较高和周期较长的情况下,性能优于MPC 算法。
除了上面提到的人工智能技术在模型辨识、波浪预测和控制方面的应用,人工智能技术还可以从数据中直接学习系统模型,提高预测模型的精度;将计算任务从实时转移到训练阶段,大大减轻在线计算负担。人工智能应用于波浪能转换装置控制的实用性和有效性已被证实,是未来的发展趋势。
3.2 多性能优化
为了进一步研究波浪能发电系统整个转换过程中各种能量形式和各组件的非理想效应对系统能量转化效率的影响,有学者提出了波浪能发电系统的波-线模型[12],包括从入射波到输送至电网的全部环节,整体研究涉及入射波浪预测、波浪装置的设计、捕获能量最大化控制和并网调控等。
除考虑PTO 系统的功率损耗外,越来越多的学者开始关注波浪能发电系统的其他性能指标。Braco 等[67]考虑了能源生产、控制力和速度限制之间的性能权衡,在MPC 框架下优化了惯性波海洋能量转换器的能量生产。Jia 等[68]提出了一种经济型MPC 策略,不同于跟踪成本函数的标准MPC策略,该方法建立了直接反映系统经济目标的一般经济成本函数,旨在最大化能量捕获并最小化操作成本,仿真结果证明了该策略的有效性。Sergiienko 等[69]研究表明,优化传动系统可显著提高电功率输出,同时将发电机的工作范围转移到效率最高的区域。
目前,对于波浪能转换装置的研究较少综合地考虑发电系统各部分之间的影响和联系。仅以能量最大化为控制目标并不能实现最经济的控制效果,波浪能发电系统各部分之间的耦合关系不容忽略。为推动波浪能发电技术的商业化发展和早日并网作业,多性能优化是未来发展的趋势。
3.3 阵列管理
波浪能发电技术尚未达到商业化程度的一个原因是发电的单位成本高,这促使科技工作者开始关注多浮子装置和阵列管理,通过大规模地利用波浪能增加能量的获取,同时多浮子或阵列共用系泊系统和电缆等设备降低单位成本,提高波浪能发电的经济性[39,70]。筏式WEC 的波浪能发电场如图7 所示[18]。

图7 筏式WEC 阵列Fig.7 Schematic diagram of raft WEC array
WEC 阵列系统中,各子装置间存在相互作用。De Andrés 等[71]分析了阵列布局、WEC 分离距离、WEC 数量和入射波浪的方向对阵列发电效率的影响。结果表明,三角形配置适合多向性波浪,分离距离要适当,WEC 的数量越多设备间的交互作用越大,对波浪能发电场的建设具有指导意义。O′sullivan 等[72]发现当WEC 设备之间存在合理的间隔时,分散式MPC 方案足以从阵列中提取接近最佳的电力。Faedo 等[73]提出了一种基于矩的能量最大化控制策略,考虑了WEC 阵列的状态和输入约束,结果表明这种控制策略保证了最优解的唯一性。
目前,阵列式WEC 发电场的经济性已经得到了证实,但对于阵列WEC 的研究还较少,大部分研究还停留在对单个设备的控制。为满足供电要求,实现波浪能发电技术的并网供电,阵列管理是值得学者们继续深入研究的方向。
4 结论
波浪能发电技术通过波浪能转换装置将波浪能这一可再生能源转换成电能加以利用,对经济可持续发展具有重要意义。目前,波浪能发电技术还处于发展前期,其控制方面仍面临许多的难题和挑战,需要进一步研究以提高波浪能转换效率。本文对波浪能转换装置控制问题进行了分析,针对控制模型失配、波浪信息预测和PTO 系统的功率损耗3 个难点,介绍了近年来波浪能转换装置控制技术的研究进展和面临的新问题,指出了控制方法未来的发展趋势,总结如下。
1) 非线性随机问题是波浪能发电亟需解决的关键问题。结合各种控制方法的优点,多种控制方法混合优化可得到很好的控制效果;人工智能在解决非线性问题上具有优越性,用于波浪能发电技术可发展出控制效果好、鲁棒性强的控制方法。
2) 随着波浪能发电技术的发展和波-线模型的提出,WEC 的控制从最大化能量捕获问题拓展为多性能优化问题。WEC 控制方法应结合波浪能发电系统的特点向多目标优化、不确定性优化等方向发展。
3) WEC 阵列部署可充分利用单位海面内的波浪能,子装置间的相互作用能提高单个设备的发电效率,而相互作用也使阵列的建模和控制更复杂。为降低发电成本,提高系统性能,阵列管理是波浪能发电技术未来发展的新动向。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
环球时报(2022-06-15)2022-06-15
科学大众(2021年9期)2021-07-16
当代陕西(2020年24期)2020-02-01
小学科学(学生版)(2020年1期)2020-01-19
小哥白尼(趣味科学)(2018年12期)2018-12-18
中华诗词(2017年4期)2017-11-10
下一代英才(酷炫少年)(2017年3期)2017-06-15
学与玩(2017年4期)2017-02-16
都市丽人(2015年2期)2015-03-20
